ьл
С
Использование: машиностроение, в частности в устройствах для перемещения грузов вручную. Сущность изобретения: система содержит рычажный механизм, упругий элемент, подвижную в осевом направлении опору, неподвижную опору для рычага и кинематическую связь рычага с подвижной опорой, причем упругий элемент выполнен в виде пластины, закрепленный одним концом на неподвижной опоре, другим концом опертой на неподвижную опору, а кинематическая связь выполнена в виде ползуна с шипом и повышающего зубчатого механизма, включающего ведущее колесо, жестко связанное с рычагом,и ведомое колесо в виде эксцентрика с пазом, в котором расположен шип ползуна. 1 з.г. ф-лы, 2 ил.
Изобретение относится к упругим регулируемым системам.
У большинства пружин зависимость между усилием деформации Р (для всех пружин равным усилию сопротивления. и величиной этой деформации (F). т.е. жесткость (Z) пружины - есть величина постоянная и графически изображается в виде отрезка прямой, наклонной под некоторым углом (#) к оси абцисс
г
- Т-
Известен ряд пружинных устройств, в которых реализуются сложные зависимости между Р и F, благодаря комбинированию нескольких пружин: последовательно или друг
густьрувестья и зка (#)
О).
, в сти неруг
протиз друга действующих нетрадиционной формы с предварительным межвитковым натягом, что позволяет в довольно широких пределах менять характер зависимости Р и F. Эта зависимость может выражаться ломаной линией, быть криволинейной, переходить даже через нулевое значение.
Наиболее близкой к предполагаемому изобретению регулируемая упругая система, включающая рычажный механизм, упругий элемент, подвижную в осевом направлении опору, неподвижную опору для рычага и кинематическую связь рычага с подвижной опорой.
Однако эта конструкция не позволяет получить неизменяемое сопротивление механизма в течение всего процесса деформации упругого элемента, т.е. нет обратной связи между механизмом перемещения точки приложения усилия пружины и величиной деформации пружины, и поэтому нет
ё
со
тааяЛ
возможности реализации процесса деформации пружины в пределах ее характеристики под действием постоянной нагрузки.
Цель изобретения - повышение эксплуатационных возможностей упругой регулируемой системы за счет уравновешенности нагрузки и реакции опоры, что графически выразится горизонтальной или достаточно близкой к ней линией характеристики устройства,
В связи с тем, что устройство находится в положении безразличного равновесия для деформации упругого элемента требуется приложение усилия сколь угодно малого, но практически в связи с наличием в устройст- ве сил трения для деформации упругого эле- мечта необходимо приложение к устройству дополнительной (вынуждающей) силы Р ° (p -Var).
Поставленная цель достигается тем, что в упругой регулируемой системе, содержащей рычажный механизм, упругий элемент, подвижную в осевом направлении опору, неподвижную опору для рычага и кинематическую связь рычага с подвижной опорой, при э м упругий элемент выполнен в виде пластины, закрепленной одним концом на неподвижной опоре, а другим концом опертой на подвижную опору, в упругой регулируемой системе кинематическая связь выполнена в виде, ползуна с шипом и повышающего зубчатого механизма, включающего ведущее колесо, жестко связанное с рычагом, и ведомое колесо в виде эксцентрика с пазом, в котором расположен шип ползуна.
Так как кинематическая связь ползуна с пружиной представляет собой механизм отслеживания хода рычага, то предлагаемое техническое решение обеспечивает постоянную зависимость между перемещением опоры упругого элемента и перемещением точки приложения сил: вынуждающей Р и деформации Р; возможность использова- ния пружин с самыми жесткими характеристиками за счет ввода между рычагом и промежуточной опорой повышающей передачи.
В качестве упругого элемента принята- пластинчатая пружина. Принята следующая схема заделки пружины
Для данной схемы заделки
12EI
аг (31 + 4а)
(2)
где Р, I и а - из схемы заделки; Е - модуль упругости; I - момент инерции сечения. Это выражение мало отличается от схемы
(3)
и
При Р - const в (2) должно выполняться соотношение F К а2 {31 + А а), где К -
I Си I
I и а - переменные, но 1 + а - const.
Построение по точкам характеристики пластинчатой пружины по формуле (2) и такой же пружины без промежуточной опоры, но тоже с переменным 10 (3), подчиняющейся зависимости
1 -Р - b SVnal/g F
S b Е К
4lg
з
о
где b - ширина пружины;
S - толщина, т.е. К - постоянный для данной пружины коэффициент, показывает что пружины по (2) и (3) отличаются весьма мало.
Как указано ранее, наличие сил трения требует приложения к механизму некоторой дополнительной переменной вынуждающей силы Р, действующей в процессе перемещения. Зависимость между перемещением точки приложения сил РиР -(ДУ) и перемещением подвижной опоры, на которую со стороны пружины действует сила Т, - (AI) носит кубический характер.,,
()-ЙЧ
дУ
т-де
Из условия равенства работ (Р + Р) Д Y Т ДI (6) и в силу кубической зависимости при изменении положения рычага
Очевидно, что для создания работоспособности конструкции требуется компенсация величины изменения возмущающей силы, например, переменным передаточным числом механизма.
Предлагаемое изобретение предполагается использовать на вновь разрабатываемом изделии медицинской техники - передвижной гамма-камере.
Одно из важнейших требований к изде- лию - малая масса.
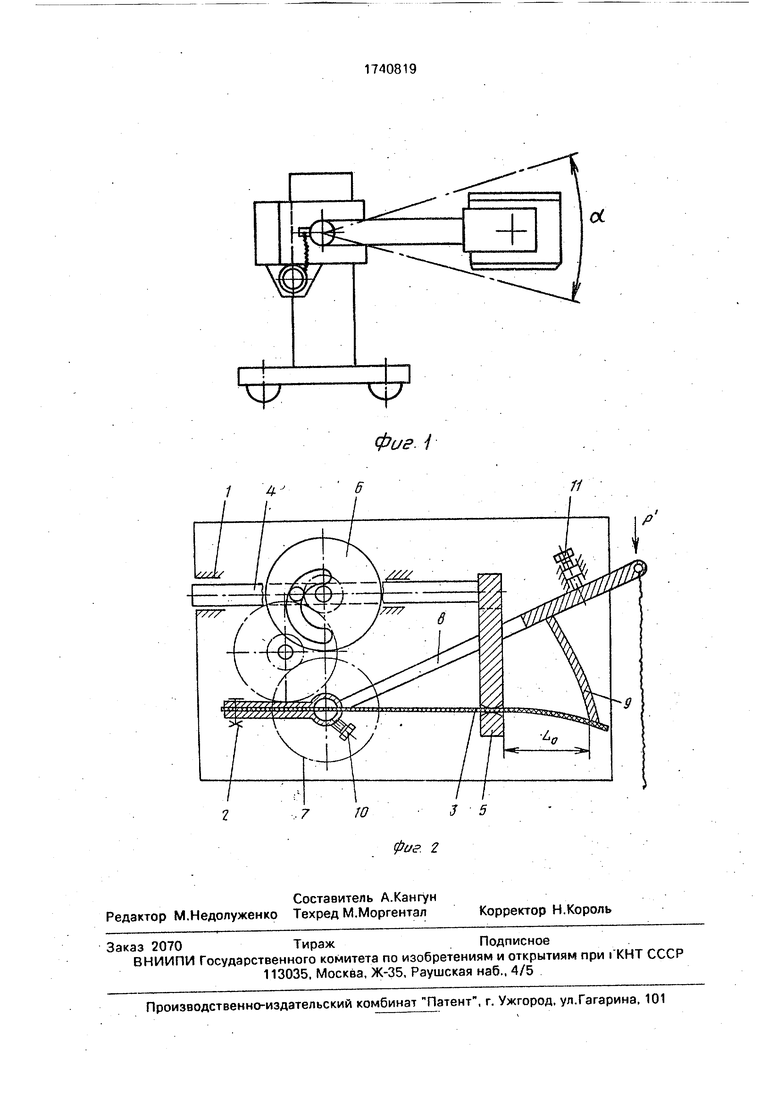
На фиг. 1 изображена передвижная гамма-камера с предлагаемым пружинным устройством; на фиг. 2 - пружинное устройство, сечение по корпусу,
Устройство содержит корпус 1, в котором установлен в опоре 2 упругий элемент 3 в виде пластинчатой пружины, второй опорой 5 упругого элемента 3 является опора скольжения на ползуне 4, установленном в направляющих корпуса 1. Шип ползуна 4 входит в паз эксцентрика 6. посаженного на одну ось с колесом повышающего зубчатого механизма 7.
Ведущее колесо механизма 7 жестко связано с рычагом 8, выступом 9 упирающимся в упругий элемент 3. Указанная жесткая связь обеспечивается зажимом 10. Исходное фиксированное положение рычага 8 обеспечивается упором 11,
Устройство работает следующим образом.
При вывинчивании упора 11 обеспечивается исходное положение рычага 8, соответствующее исходному (без деформации) положению упругого элемента 3. Вывинчивание зажима 10 освобождает от связи рычаг 8 и колесо механизма 7,
При фиксированном ползуне 4 нагружают рычаг 8 необходимым для работы устрой- ства в режиме противовеса усилием (с учетом сил трения) и восстанавливают зажимом 10 жесткую связь между рычагом 8 и колесом механизма 7. Доворачивают упор 11 до рычага 8. Соединяют рычаг 8, напри- мер, стальным канатом с уравновешивающим механизмом. При перемещении рычага 8 величине деформации упругого элемента 3 сопутствует пропорциональное увеличе
ние расстояния lo и поддержание благодаря этому Р постоянным (или близким к нему за счет колебания величины необходимой возмущающей силы) в процессе всего участка перемещения.
Управление величиной возмущающей силы возможно за счет изменения кривизны поверхности эксцентрика.
Настройка пружинного устройства осуществляется подбором упругого элемента с наиболее желательной характеристикой.
Применение предлагаемой конструкции позволяет перемещать вручную предмет большой массы (в частности блок детектирования передвижной гамма-камеры) без применения противовеса, что позволит облегчить и упростить конструкцию, а также позволит отказаться от массивных электроприводов для перемещения больших масс, что также облегчит конструкцию; достаточно просто перенастраивать пружинное устройство при изменениях массы перемещаемого груза в процессе подготовки изделия к эксплуатации; подбирать такое (постоянное или переменное) значение вынуждающей силы, которое обеспечит удобство управления и полную безопасность (предотвращение произвольного опускания) перемещаемого груза.
Формула изобретения
/ 4
6
| Детали машин | |||
| Расчет и конструирование | |||
| Справочник / Под ред | |||
| Н.С.Ачеркана | |||
| М.: Машиностроение, 1968, т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВОДЫ ОТ НЕФТЕПРОДУКТОВ | 1996 |
|
RU2100284C1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
