Изобретение относится к области обработки материалов давлением и может быть использовано для гибки полосового материала, в том числе для гибки биговальных и рубящих ножей вырубных штанцевых форм, которые используются для изготовления упаковки, этикеток и пр.
Известен листогибочный пресс с ручным приводом (1), содержащий основание, матрицу и установленный с возможностью возвратно-поступательного перемещения пуансон. Перемещение пуансона осуществляется посредством рычажного механизма, что требует значительных усилий со стороны оператора.
Известно ручное гибочное устройство (2), содержащее основание, матрицу, пуансон и эксцентриковый механизм на основе одного эксцентрика для его перемещения. Данное устройство позволяет уменьшить усилия, прикладываемые оператором в процессе работы, при гибке одно - и 2-пунктовых линеек. Однако при гибке 3-пунктовых и более толстых линеек и гибке линеек для технических штампов оператору приходится прикладывать значительные усилия.
Техническим результатом изобретения является уменьшение усилий, прикладываемых оператором при гибке, обеспечение удобства его работы и тем самым повышение производительности его труда, повышение качества изготовляемого ножа, увеличение срока службы устройства.
Указанный технический результат достигается тем, что в ручном гибочном устройстве, содержащем основание, рукоятку, упор с матрицей, пуансон, закрепленный в держателе, соединенном с ползуном, эксцентриковый механизм, соединенный с ползуном, подшипниковые опоры, жестко закрепленные на основании, пружину, соединенную с основанием, эксцентриковый механизм выполнен в виде пары эксцентриков, несущего и дополнительного, рычага-коромысла с роликом и стержня с корпусом, эксцентрики выполнены с разными эксцентриситетами и разными диаметрами, при этом эксцентрик с большим диаметром выполнен с большим эксцентриситетом, несущий эксцентрик выполнен с меньшим эксцентриситетом и ступицей и жестко посажен на вал, установленный в подшипниковые опоры, дополнительный эксцентрик посажен на ступицу несущего с возможностью относительного поворота с последующей фиксацией, при этом эксцентрики размещены относительно друг друга так, что начало рабочего участка дополнительного эксцентрика совпадает с концом рабочего участка несущего эксцентрика по ходу поворота вала, в эксцентриках выполнены выемки, размеры и форма которых таковы, что выемка в несущем эксцентрике не перекрыта выемкой в дополнительном эксцентрике, рычаг-коромысло установлен на шарнирной опоре, закрепленной на основании, ролик установлен на одном конце рычага-коромысла в контакте с эксцентриками, при этом ширина ролика больше ширины рабочей поверхности любого эксцентрика, второй конец рычага-коромысла шарнирно соединен с корпусом, один конец стержня шарнирно соединен с ползуном, а другой конец помещен в корпус и установлен в контакте с регулировочным винтом-упором, установленным на стенке корпуса, при этом в корпусе выполнено резьбовое отверстие, в котором установлен винт для фиксации стержня, второй конец пружины установлен на ползуне, а рукоятка жестко закреплена на валу с эксцентриками.
Технологический процесс гибки, исходя из законов деформации металла, выглядит следующим образом. Весь путь ползуна с пуансоном (при неподвижной матрице) можно разбить на три участка. Первый, самый длинный, ползун с пуансоном проходит до встречи с заготовкой, опирающейся на матрицу. Этот участок необходим для предварительных вспомогательных действий (замена инструмента, очистка рабочего пространства и т.п.).
На втором участке с начала взаимодействия пуансона с заготовкой, опирающейся на матрицу, требуется максимальное усилие с минимальным перемещением, поскольку здесь необходимо преодолеть сопротивление упругой деформации металла (предел пропорциональности) и выйти на уровень пластической деформации (напряжение в металле должно превысить величину предела текучести). При этом высокая скорость деформации может привести к трещинам и локальным повреждениям поверхности заготовки. Указанный участок должен соответствовать зоне рабочего профиля эксцентрика, примыкающей к максимально удаленной от его центра точке (апогей).
Третий, заключительный участок, характеризуется практически отсутствием приращения усилия, поскольку здесь область пластической деформации. Полученный изгиб линейки должен обеспечить достижение параметров штанцевой формы. Этот участок соответствует зоне рабочего профиля эксцентрика, примыкающей к области, удаленной от апогея.
На практике ход ползуна при максимальном силовом воздействии со стороны оператора - 4-6 мм, а общий его путь - 20-30 мм. При этом угол поворота эксцентрика, связанного с рукояткой, не должен превышать 130°° согласно требованиям эргономики.
Такова оптимальная последовательность взаимодействий в гибочном устройстве.
В механизме на основе одного эксцентрика область максимально создаваемого усилия находится вблизи апогея, т.е. в конце пути ползуна с пуансоном, где перемещение его минимально. Для процесса гибки на этом участке нет нужды в максимальном усилии (стадия пластической деформации), но необходимо относительно большое перемещение. Максимальное усилие и минимальное перемещение требуются на предыдущей стадии (стадия упругой деформации). Таким образом, в механизме на основе одного эксцентрика преодоление сопротивления упругой деформации приходится на участок, удаленный от апогея, что требует от оператора чрезмерных, зачастую ударных воздействий на рукоятку. К отрицательным последствиям этого следует отнести невысокую точность гнутого профиля и дефекты поверхности ножа, преждевременный износ деталей станка, накапливающуюся усталость оператора в течение рабочей смены, что ведет к снижению производительности его труда.
Эксцентриковый механизм на основе пары эксцентриков по изобретению позволяет преодолеть указанные недостатки, сохранив необходимую величину перемещения ползуна. В таком механизме максимум силового воздействия и минимум перемещения приходятся на стадию упругих деформаций металла, а относительно большие перемещения - на стадию пластической деформации. При этом первый участок (участок до встречи с заготовкой) преодолевается при малом угле поворота рукоятки (20°-30°), что обусловлено наличием выемки на профиле эксцентрика. Усилие здесь требуется только для преодоления сопротивления пружины.
Ручное гибочное устройство представлено на фиг.1-3, при этом на фиг.1 представлена принципиальная кинематическая схема устройства, где
1 - основание,
2 - ползун,
3 - держатель,
4 - пуансон,
5 - верхняя крышка основания,
6 - упор,
7 - матрица,
8 - несущий эксцентрик,
9 - дополнительный эксцентрик,
10 - рычаг-коромысло,
11 - ролик,
12 - стержень,
13 - корпус,
14 - шарнирная опора,
15 - регулировочный винт-упор,
16 - фиксирующий винт,
17 - вал,
18 - подшипниковые опоры,
19 - выемка,
20 - рукоятка,
21 - пружина.
На фиг.2 представлена схема положения рычага-коромысла при разных углах поворота эксцентриков, где m, n, p - характерные точки профиля эксцентриков (mn - участок преодоления сопротивления упругой деформации, np - участок пластической деформации), при этом положение на фиг.2, а соответствует исходному положению рукоятки, фиг.2, б - повороту рукоятки на 30°, фиг.2, в - на 75°, фиг.2, г - на 90°, фиг.2, д - на 125°.
На фиг.3 показана схема взаимодействия эксцентриков с роликом, при этом фиг.3а соответствует взаимодействию с эксцентриком 8 на участке mn, а фиг.3б соответствует взаимодействию с эксцентриком 9 на участке np.
Ручное гибочное устройство (фиг.1) содержит основание 1 с полостью, на внутренних поверхностях которой как на направляющих установлен ползун 2. На ползуне установлен держатель 3 с пуансоном 4. На верхней крышке 5 установлен упор 6 с матрицей 7. Эксцентриковый механизм соединен с ползуном 2 и выполнен в виде пары эксцентриков: несущего 8 и дополнительного 9, рычага-коромысла 10 с роликом 11 и стержня 12 с корпусом 13.
Эксцентрики выполнены с разными эксцентриситетами и разными диаметрами, при этом эксцентрик с большим диаметром выполнен с большим эксцентриситетом, несущий эксцентрик 8 выполнен с меньшим эксцентриситетом и ступицей и жестко посажен на вал, установленный в подшипниковые опоры, дополнительный эксцентрик 9 посажен на ступицу несущего с возможностью относительного поворота с последующей фиксацией, при этом эксцентрики размещены относительно друг друга так, что начало рабочего участка дополнительного эксцентрика совпадает с концом рабочего участка несущего эксцентрика по ходу поворота вала. Рычаг-коромысло 10 установлен на шарнирной опоре 14, закрепленной на основании 1, ролик 11 установлен на одном конце рычага-коромысла в контакте с эксцентриками, при этом ширина ролика больше ширины рабочей поверхности любого эксцентрика, а второй конец рычага-коромысла шарнирно соединен с корпусом 13. Один конец стержня 12 шарнирно соединен с ползуном 2, а другой конец помещен в корпус 13 и установлен в контакте с регулировочным винтом-упором 15, установленным на стенке корпуса, при этом в корпусе выполнено резьбовое отверстие, в котором установлен винт 16 для фиксации стержня. Эксцентрик со ступицей жестко насажен на вал 17, установленный в подшипниковых опорах 18, в эксцентриках выполнены выемки 19, размеры и форма которых таковы, что выемка в эксцентрике, посаженном на вал, не перекрыта выемкой в эксцентрике, посаженном на ступицу. На выходном конце вала жестко закреплена рукоятка 20, а между ползуном и основанием установлена пружина 21.
Выемка несущего эксцентрика может быть выполнена с профилем в виде отрезка ломаной линии со скругленными углами, а выемка дополнительного эксцентрика может быть выполнена в виде среза по хорде.
Кривые, ограничивающие профили выемок, могут быть любой формы, обеспечивающей работоспособность устройства. Профиль выемки несущего эксцентрика должен быть выполнен так, что ролик взаимодействует только с отрезком кривой профиля, примыкающим к рабочему участку эксцентрика. Кривую профиля выемки ограничивают точкой пересечения с рабочим участком эксцентрика и точкой пересечения с профилем эксцентрика в области перигея - точкой, наиболее близкой к центру эксцентрика. Профиль выемки дополнительного эксцентрика должен быть выполнен так, что пространство, ограниченное кривой профиля, превосходит площадь выемки несущего эксцентрика и может охватывать всю нерабочую часть дополнительного эксцентрика.
Прерывистое движение воздействующего на материал инструмента уменьшает сопротивление материала деформации. Вследствие этого рабочие поверхности эксцентриков могут быть выполнены рифлеными, что также способствует уменьшению усилий, прикладываемых оператором при гибке.
Устройство работает следующим образом. В исходном положении ролик 11 рычага-коромысла 10 находится в выемке 19 эксцентрика 8 (фиг.2, а). С началом поворота и взаимодействия эксцентрика 8 с роликом рычаг-коромысло отклоняется, и ролик выкатывается на поверхность эксцентрика, контактируя с последним в точке m (фиг.2, б). При этом ползун с пуансоном 4 перемещается до соприкосновения с заготовкой, опирающейся на матрицу 7. При дальнейшем движении начинается процесс деформации заготовки с преодолением силы упругого сопротивления металла. Здесь необходимо максимальное силовое воздействие. Благодаря тому что, взаимодействие ролика с эксцентриком 8 происходит на участке mn (фиг.2, б, в, г; фиг.3, а), близком к апогею, от оператора не требуется приложения чрезмерного усилия. Меньший эксцентриситет эксцентрика 8 также способствует уменьшению усилий, прикладываемых оператором. Положение ролика в точке n соответствует началу пластической деформации. При продолжении поворота рукоятки ролик в точке n переходит во взаимодействие с эксцентриком 9. На участке np (фиг.2, г, д, фиг.3, б), удаленном от апогея (здесь относительно большие перемещения), происходит пластическая деформация и завершение процесса гибки..
При обратном повороте вала с эксцентриками посредством рукоятки подвижные части устройства возвращаются в исходное положение с помощью пружины.
Изменение суммарной длины стержня 12 и корпуса 13 с помощью винтов необходимо для сохранения постоянства параметров процесса гибки. Это связано с тем, что размеры матриц и пуансонов могут изменяться в весьма широких пределах, и участок поверхности крышки 5 основания 1, на котором могут располагаться зоны контакта пуансона, заготовки и матрицы, достаточно протяжен.
Таким образом, устройство по изобретению позволяет уменьшить усилия, прикладываемые оператором при гибке, обеспечивает удобство работы оператора и тем самым повышает производительность его труда, повышает качество изготовляемого ножа, увеличивает срока службы устройства.
Источники информации
1. Патент RU №2150343, B21D 5/02, 12.10.1999.
2. Патент RU №2212967, B21D 5/02, 05.04.2002 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНОЕ ГИБОЧНОЕ УСТРОЙСТВО | 2002 |
|
RU2212967C1 |
| ШТАМП ДЛЯ ВЫРУБКИ ПАЗОВ В ПОЛОСОВЫХ ЗАГОТОВКАХ | 2002 |
|
RU2217298C1 |
| РУЧНОЙ ШТАМП ДЛЯ ОТРЕЗКИ ПОЛОСОВОГО МАТЕРИАЛА | 2002 |
|
RU2217270C1 |
| Ручное гибочное устройство | 2024 |
|
RU2836116C1 |
| Способ и устройство для гибки тонколистового металла | 2017 |
|
RU2638465C1 |
| РЕЖУЩЕЕ УСТРОЙСТВО | 2002 |
|
RU2219047C1 |
| РУЧНЫЕ НОЖНИЦЫ | 2002 |
|
RU2213648C1 |
| Устройство для беззаусенечной резки стержневых заготовок | 1980 |
|
SU902946A1 |
| Автомат для изготовления двух ветвевых пружин с отогнутыми концами | 1989 |
|
SU1657263A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗ КОНСТАНТАНОВОЙ ПРОВОЛОКИ СКОБОК И ВСТАВКИ ИХ В АСБЕСТОВЫЕ КОРОБКИ ТЕРМОБЛОКОВ | 1956 |
|
SU108681A1 |
Изобретение относится к области обработки металлов давлением и предназначено для ручной гибки полосового материала. Устройство содержит основание, рукоятку, упор с матрицей, пуансон, закрепленный в держателе, соединенном с ползуном, эксцентриковый механизм, соединенный с ползуном. Эксцентриковый механизм выполнен в виде пары эксцентриков, несущего и дополнительного, рычага-коромысла с роликом и стержня с корпусом. Эксцентрики выполнены с разными эксцентриситетами и разными диаметрами, при этом эксцентрик с большим диаметром выполнен с большим эксцентриситетом. Несущий эксцентрик выполнен с меньшим эксцентриситетом и ступицей, на которую посажен дополнительный эксцентрик с возможностью относительного поворота с последующей фиксацией. В эксцентриках выполнены выемки, размеры и форма которых таковы, что выемка в несущем эксцентрике по площади не перекрыта выемкой в дополнительном эксцентрике. Устройство позволяет уменьшить усилия, прикладываемые оператором при гибке, обеспечивает удобство работы оператора и тем самым повышает производительность его труда, повышает качество изготовляемого ножа, увеличивает срок службы устройства. 2 з.п. ф-лы, 3 ил.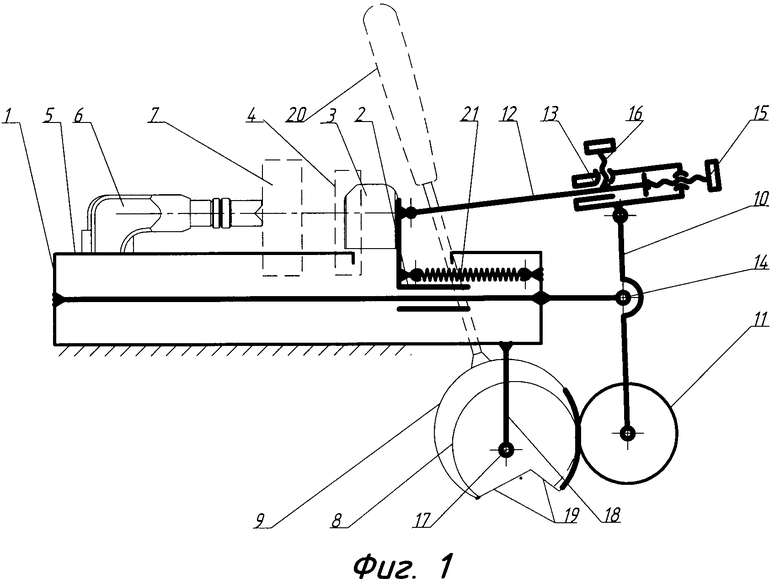
1. Ручное гибочное устройство, содержащее основание, рукоятку, упор с матрицей, пуансон, закрепленный в держателе, соединенном с ползуном, эксцентриковый механизм, соединенный с ползуном, подшипниковые опоры, жестко закрепленные на основании, пружину, соединенную с основанием, отличающееся тем, что эксцентриковый механизм выполнен в виде пары несущего и дополнительного эксцентриков, рычага-коромысла с роликом и стержня с корпусом, при этом эксцентрики выполнены с разными эксцентриситетами и разными диаметрами, причем эксцентрик с большим диаметром выполнен с большим эксцентриситетом, несущий эксцентрик выполнен с меньшим эксцентриситетом и ступицей и жестко посажен на вал, установленный в подшипниковые опоры, дополнительный эксцентрик посажен на ступицу несущего эксцентрика с возможностью относительного поворота с последующей фиксацией, при этом эксцентрики размещены относительно друг друга так, что начало рабочего участка дополнительного эксцентрика совпадает с концом рабочего участка несущего эксцентрика по ходу поворота вала, в эксцентриках выполнены выемки, размеры и форма которых исключают перекрытие выемки несущего эксцентрика выемкой дополнительном эксцентрика, рычаг-коромысло установлен на шарнирной опоре, закрепленной на основании, ролик установлен на одном конце рычага-коромысла в контакте с эксцентриками, при этом ширина ролика больше ширины рабочей поверхности любого эксцентрика, второй конец рычага-коромысла шарнирно соединен с корпусом, один конец стержня шарнирно соединен с ползуном, а другой конец помещен в корпус и установлен в контакте с регулировочным винтом-упором, установленным на стенке корпуса, при этом в упомянутом корпусе выполнено резьбовое отверстие, в котором установлен винт для фиксации стержня, второй конец пружины установлен на ползуне, а рукоятка жестко закреплена на валу с эксцентриками.
2. Ручное гибочное устройство по п.1, отличающееся тем, что выемка несущего эксцентрика выполнена с профилем в виде отрезка ломаной линии со скругленными углами, а выемка дополнительного эксцентрика выполнена в виде среза по хорде.
3. Ручное гибочное устройство по п.1, отличающееся тем, что рабочие поверхности эксцентриков выполнены рифлеными.
| РУЧНОЕ ГИБОЧНОЕ УСТРОЙСТВО | 2002 |
|
RU2212967C1 |
| Устройство для гибки | 1975 |
|
SU555941A1 |
| РУЧНОЙ ТРУБОГИБ ГУЛЕВСКОГО | 1995 |
|
RU2084301C1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ, ПОВОРОТНО-ГИБОЧНЫЙ ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ И МАНИПУЛЯТОР ЛИСТОВ К ГИБОЧНОМУ ПРЕССУ | 1993 |
|
RU2110349C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 3675460 А1, 11.07.1972. | |||

