сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат магнитной записи | 1982 |
|
SU1064312A1 |
| Устройство для перемотки магнитной ленты | 1982 |
|
SU1123053A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1978 |
|
SU736932A1 |
| Устройство синхронизации сигналов данных воспроизведения с подвижного оптического носителя | 1988 |
|
SU1527662A1 |
| Бесконтактная цифровая система зажигания для двигателей внутреннего сгорания | 1990 |
|
SU1824502A1 |
| Устройство для записи измерительной сигналограммы на магнитную ленту | 1974 |
|
SU492928A1 |
| Устройство для управления лентопротяжным механизмом | 1985 |
|
SU1280445A1 |
| Устройство для контроля элемента вращения лентопротяжного механизма | 1986 |
|
SU1339649A1 |
| Устройство для старт-стопной подачи ленточного материала | 1987 |
|
SU1476505A1 |
| Устройство для оценки профессиональной пригодности радиооператоров | 1989 |
|
SU1686471A1 |
Изобретение относится к автоматике и вычислительной технике, а именно к лентопротяжным механизмам устройства регистрации информации на ленточный носитель Цель изобретения - повышение надежности работы механизма. Лентопротяжный механизм содержит подающие и приемные бобины, прижимной ролик и ведущий вал, кинематически связанный с электроприводом В устройстве обеспечивается регулирование положения прижимного ролика с помощью двух датчиков сигнала положения прижимного ролика, двух корректирующих двигателей, механически связанных с опорами оси прижимного ролика, и блока управления, содержащего два усилителя-формирователя импульсов, инвертор, элемент ИЛИ, триггер, три элемента И и генератор импульсов с соответствующими связями 4 ил
Изобретение относится к автоматике и вычислительной технике, в частности к лентопротяжным механизмам устройств регистрации информации на лентопротяжный носитель, и может быть использовано при разработке периферийных устройств ЭВМ и других систем.
Цель изобретения - повышение надежности.
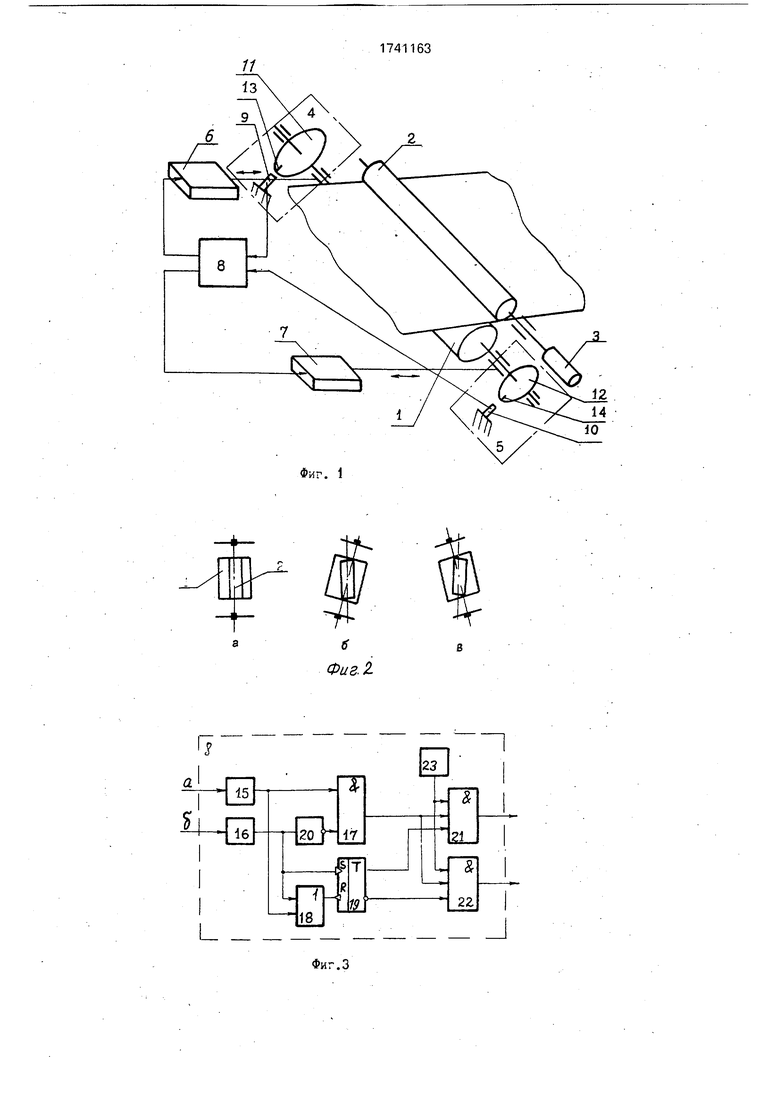
На фиг. 1 представлена функциональная схема механизма, на фиг 2 - возможные положения прижимного ролика относительно ведущего вала, на фиг. 3 - схема блока управления; на фиг. 4 - временные диаграммы сигналов, поясняющие работу блока управления.
Механизм содержит подающую и приемную бобины (не показаны), прижимной ролик 1 и ведущий вал 2, кинематически
связанный с электроприводом 3, два датчика 4 и 5 сигналов (положения прижимного ролика 1), два корректирующих двигателя 6 и 7, в качестве которых могут быть использованы пьезодвигятепи. и блок 8 управления Датчики 4 и 5 сигналов состоят соответственно из электромагнитных преобразователей 9 и 10 сигналов и дисков 11 и 12 с магнитными элементами 13 и 14 (метками). В качестве преобразователей 9 и 10 могут быть использованы индуктивные элементы, а метки на дисках 11 и 12 могут быть выполнены в виде вставок из постоянных магнитов
Блок 8 управления (фиг. 3) состоит из двух усилителей-формирователей 15 и 16 импульсов соединенных соответственно с входами элемента И 17 и элемента ИЛИ 18 триггера 19 и инвертора 20, выход которого
Х|
4
О OJ
подключен к другому входу элемента И 17. Выход элемента ИЛИ 18 соединен с установочным входом триггера 19. Выходы триггера 19 соединены соответственно с первыми входами элементов И 21 и 22, вторые входы которых подключены к выходу элемента И 17. Третьи входы элементов И 21 и 22 соединены с выходом генератора 23 импульсов.
Лентопротяжный механизм работает следующим образом.
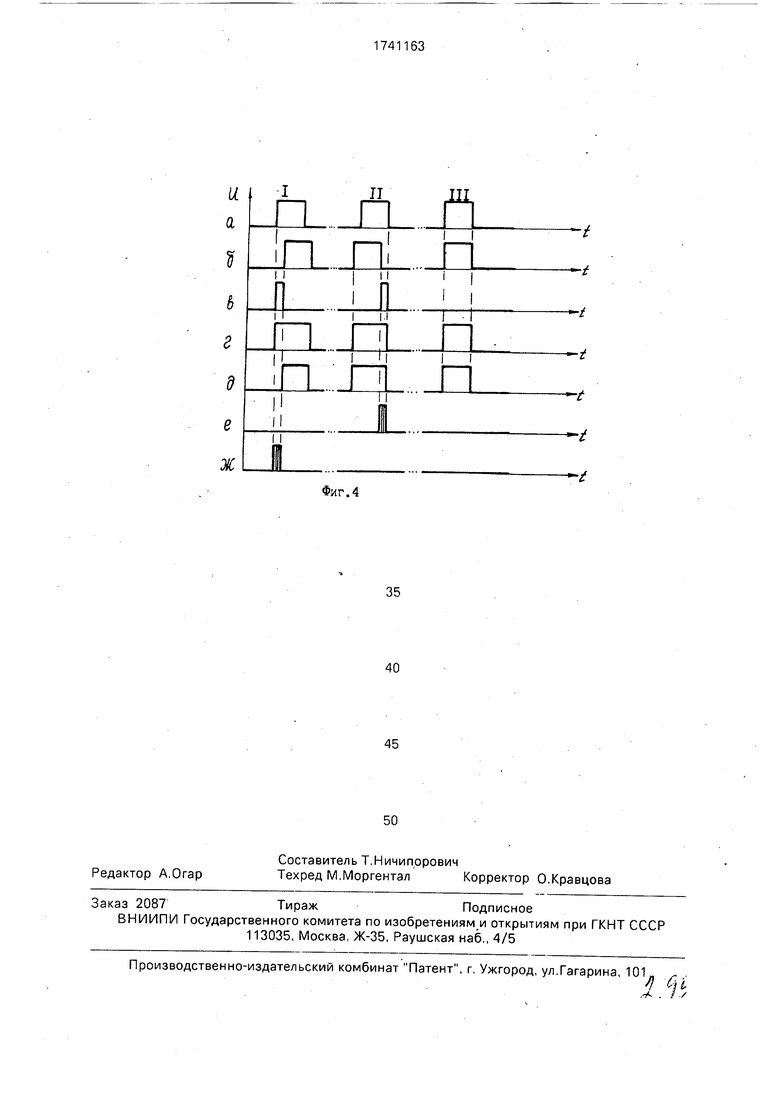
При движении ленточного носителя информации в случае, когда отсутствует перекос прижимного ролика 1 по отношению к оси ведущего вала 2 (фиг. 2а), метки 13 и 14, расположенные на дисках 11 и 12, проходят около преобразователей 9 и 10 сигнала синхронно. В результате отсутствия фазового рассогласования импульсов (фиг, 4а, б, III) с выходов усилителей-формирователей 15 и 16 импульсов на выходе элемента И 17 им- пульса не будет (фиг. 4в, III), вследствие чего выходные элементы И 21 и 22 будут закрыты для прохождения управляющих импульсов от генератора 23 к корректирующим двигателям 6 и 7. В этом случае, когда ось при- жимного ролика имеет наклон к оси ведущего вала (фиг, 26, в), метки 13 и 14 проходят около преобразователей 9 и 10 несинхронно со сдвигом по фазе, в результате чего импульсы (фиг. 4а, б, I) с выхода усилителей-формирователей 15 и 16 имеют фазовое рассогласование. Вследствие этого на выходе элемента И 17 формируется импульс (фиг. 4в, I), длительность которого соответствует рассогласованию, который поступает на элементы И 21 и 22. Так как триггер 19 к этому моменту времени находится в нулевом состоянии (фиг. 4д, I), то управляющие импульсы с генератора 23 импульсов (фиг. 4ж, I) поступают через элемент И 22 на второй корректирующий двигатель 7, который изменяет положение прижимного ролика 1 до совпадения сигналов с преобразователей 9 и 10 по фазе Передним фронтом импульса (фиг. 46, I) с выхода вто- рого усилителя-формирователя 16 триггер
19 устанавливается в единичное состояние. Задним фронтом расширенного импульса (фиг. 4г, I) триггер 19 устанавливается в исходное состояние (фиг. 4д, I).
В случае наклона оси прижимного ролика 1 в противоположную сторону (фиг. 26) импульс с выхода усилителя-формирователя 16 опережает импульс с выхода усилителя-формирователя (фиг. 4а, б, II), поэтому на момент формирования импульса (фиг. 4в, II) на выходе элемента И 17 высоким потенциалом с прямого выхода триггера 19 (фиг, 4д, II) открывается элемент И 21 и управляющие импульсы с генератора 23 импульсов (фиг. 4е, II) поступают на первый корректирующий двигатель 6, который выравнивает положение прижимного ролика 1, Соответствующим образом задним фронтом импульса с выхода элемента ИЛИ 18 (фиг. 4г, II ) триггер 19 устанавливается в исходное состояние (фиг.4д, II). Возможность контроля и регулирования положения прижимного ролика 1 позволяет повысить надежность регистрации информации за счет снижения количества сбоев, возникающих вследствие перекосов и нестабильности скорости ленточного носителя информации.
Формула изобретения Лентопротяжный механизм, содержащий ведущий вал, кинематически связанный с электроприводом, прижимной ролик, ось которого расположена в опорах, датчики сигналов и блок управления, отличаю - щ и и с я тем, что, с целью повышения надежности, он содержит корректирующие двигатели, механически связанные с опорами, а каждый из датчиков сигналов состоит из диска с магнитным элементом и электромагнитного преобразователя, причем диски с магнитным элементом жестко закреплены на концах оси прижимного ролика, выходы электромагнитных преобразователей подключены к входам блока управления, выходы которого соединены с управляющими входами корректирующих двигателей.
Фиг. 1
| Михневич А.В, Лентопротяжные механизмы | |||
| М.: Энергия, 1971, с.41 Авторское свидетельство СССР № 1434464, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
