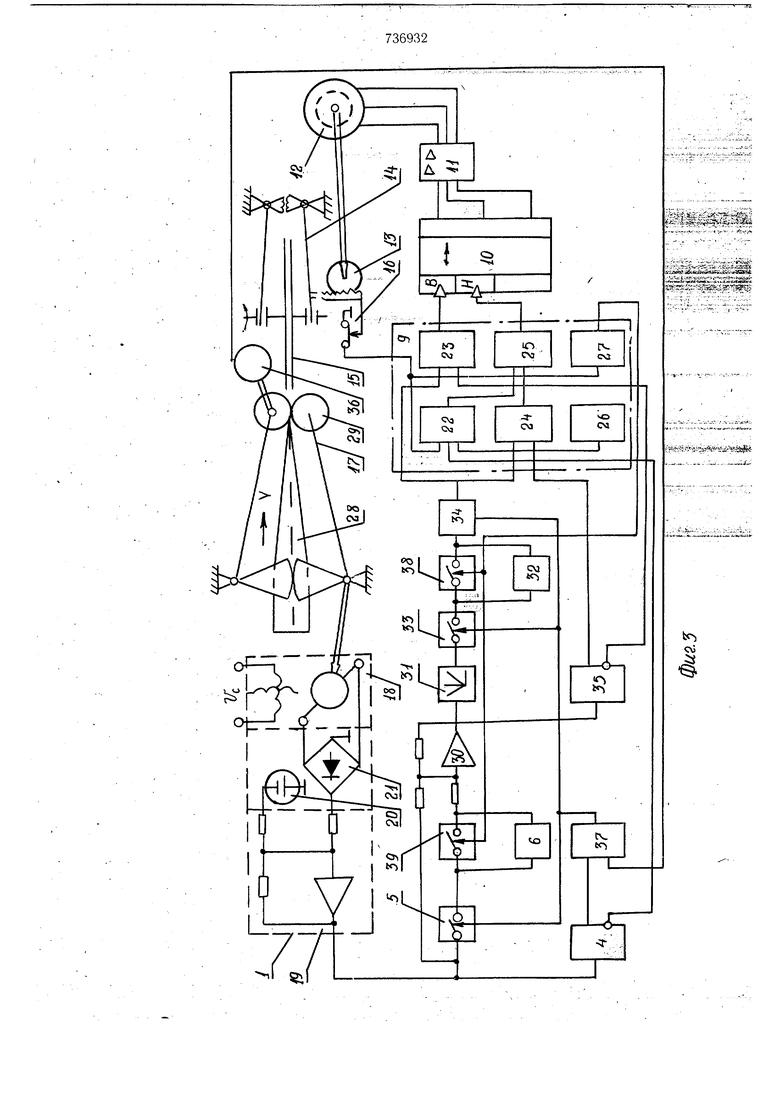
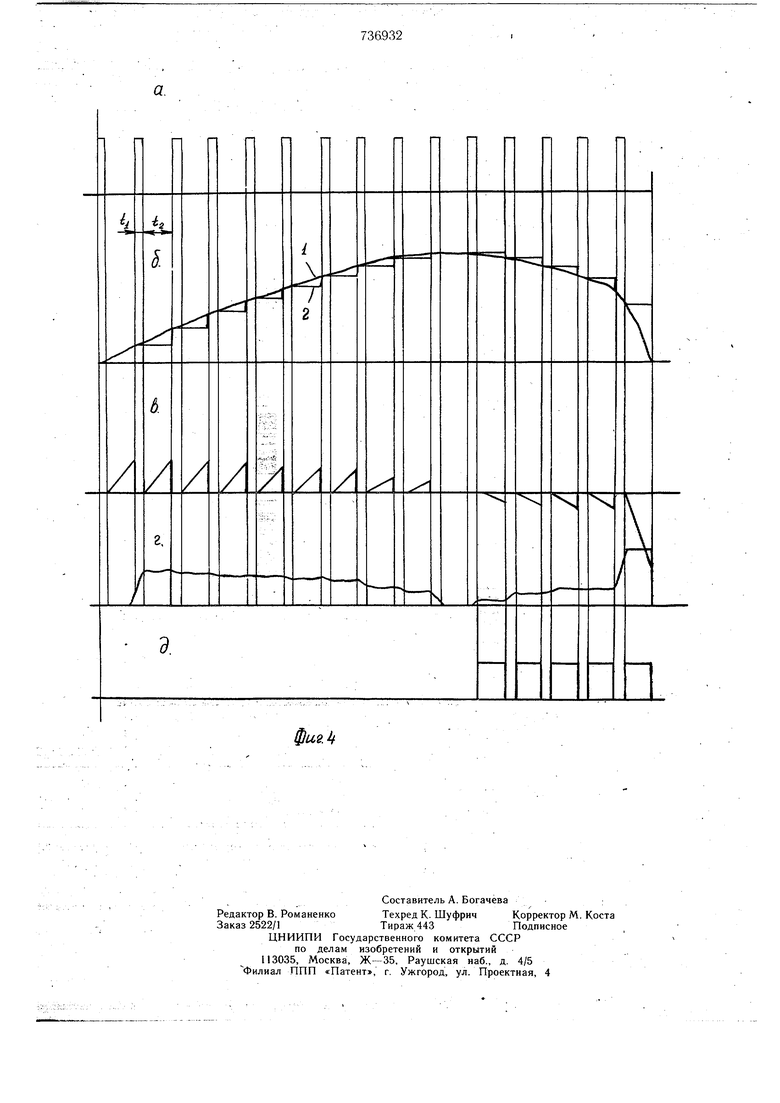
Изобретение относится к механизации и автоматизации процессов обработки рыбы и может быть использовано в устройствах для автоматической разделки различных пород рыб на филе. Известно устройство для управления рабочими органами рыборазделочной машины, содержащее рычаг для обмера тела рыбы по высоте, эксцентриковый механизм с профилем, соответствующим изменению толщины позвоночника от хвоста к голове, и спаренные дисковые ножи, которые укреплены с возможностью перемещения по вертикали и связа.ны с рычагом для обмера тела рыбы и эксцентриковым механизмом посредством шарнирнорычажной системы 1. Недостаток этого устройства заключается в том, что наличие в устройстве инерционных кинематических связей и механиз иа с профилем не обеспечивает высокой производительности выполнения требуемых операций и затрудняет перенастройку устройства при переходе на обработку другой породы рыбы., - Наиболее близким техническимрешением к предлагаемому является устройство для управления рабочими органами рыборазделочной мащины, содержащее датчик измеряемого параметра рыбы , триггер, дизъюнктор и систему управления исполнительным механизмом, включающую шаговый двигатель с коммутатором и блок управления движением рабочего органа 2. Недостаток известного устройства для управления рабочими органами рыборазделочной машины состоит в невысоких точности и качестве обработки рь1б различных видов на филе из-за невозможности слежения за изменениями координат тела рыбы в процессе движения ее относительно рабочих органов. Цель изобретения - повышение точности и качества разделки рыб различных видов. . Поставленная цель достигается тем, что устройство для управления рабочими органами рыборазделочной машины, содержащее датчик измеряемого параметра рыбы, триггер, дизъюнктор и систему управления исполнительным механизмом, включающую шаговый двигатель с коммутатором и блок управления движением рабочего органа, снабжено аналоговой запоминающей ячейкой с ключомна входе и компаратором, вход связан с датчиком измеряемого параметра, а его выход - с системой управления исполнительным механизмом. При этом устройство снабжено двумя дополнительными компараторами, входы которых соединены с выходом датчика измеряемого параметра рыбы и со входом ключа, . а выходы через триггер и дизъюнктор - с системой управления исполнительным механизмом. Кроме того, устройство снабжено Дат чиком перемещения транспортера рыборазде лочной машины, .последовательно соединенными сумматором, формирователем модуля, дополнительной аналоговой запоминающей ячейкой с ключом на входе и преобразователем аналог-код. Датчик перемещения транспортера соединен через конъюнктор с ключами и преобразователем аналог-код. Входы сумматора связаны с выходом основной аналоговой запоминающей ячейки и выходом датчика измеряемого параметра рыбы. Выход сумматора через комп,аратор подключен к системе управления исполнительньш механизмом. На фиг. 1 изображена принципиальная блок-схема первого варианта устройства; на фиг. 2 -диаграммы сигналов; на фиг. 3принципиальная блок-схема второго варианта устройства; на фиг. 4 - диаграммы сигналов. Устройство для управления рабочими органами рыборазделочной мащины (см. фиг. 1) содержит датчик 1 толщины рыбы,те1ход которого подключен к одному из входов каждого из компараторов 2-4 и через ключ 5 ко входу а налоговой запоминающей ячейки 6. Вторые входы каждого из компараторов 2 и 3 подключены к выходу аналоговой запоминающей ячейки 6. К, выходам компараторов 2 и 3 подключены триггер 7 и дизъюнктор 8, выход которого соединен с управляющим входом ключа 5. Компараторы 2 и 3 имеют различные статические характеристики. Например, компаратор 2 изменяет свое состояние от положительной разности входных сигналов, а компаратор 3 - от отрицательной разности входных сигналов. Выходы дизъюнктора 8, триггера 7 и компаратора 4 подключены к блоку 9 управления .движением рабочего органа, который обеспечивает посредством коммутатора .10, усилителя 11 и шагового двигателя 12, связанного реечной парой 13 с рычагами 14, осевое перемещение дисковых ножей 15. Начальное состояние дисковь1х ножей 15 фиксируетс.я конечным выключателем 16. Датчик 1 толщины рыбы состоит из измерительного рычага 17, в качестве которого используется один из. направляющих рычагов транспортирую1щего органа,связанного с чувствительным элемент-ом 18 .(косинусным преобразователем угла в электрический сигнал), и суммирующего усилителя 19, входы которого подключены к источнику 20 эталонного напряжения и через выпрямитель 21 к выходу чувствительного элемента 18. В состав блока 9 управления движением рабочего органа входят койъюкторы 22 - 24, дизъюнктор 25, генератор 26 импульсов и формирователь 27. Транспортировка рыбы 28 .относительно дисковых ножей 15 осуществляется рифленными роликами 29, установленными на концевых направляющих рычагов 17. В отличие от первого варианта второй вариант устройства (см. фиг. 3) содержит последовательно включенные сумматор 30, формирователь 31 модуля, дополнительную аналоговую запоминающую ячейку 32 с ключом 33 на входе и преобразователь 34 аналог-код. Кроме того, устройство содержит компаратор 35 и импульсный датчик 36 перемещения транспортера рыборазделочной мащины, который через конъюнктор 37 подключен к ключам 5 и 33 и преобразователю 34 аналог-код. Сброс информации с ячеек 6 и 32 осуществляется ключами 39 и 38. Устройство по первому варианту работает следующим образом (см. фиг. 1 и 2). При перемешении рыбы 28 по стрелке V последняя захватывается транспортирующими роликаг и 29 и центрируется относительно дисковых ножей 15. Под действием тела рыбы 28 рычаги 17 отклоняются, поворачивая на некоторый угол чувствительный элемент 18. Сигнал на его косинусном выходе начинает изменяться от максимального до величины, пропорциональной косинусу угла поворота. С помощью выпрямителя 21 этот сигнал выпрямляется и сравнивается посредством сумматора 19 с эталонным сигналом от источника 20. В результате, на выходе сумматора 19 формируется аналоговый сигнал (см. фиг. 2а, кривая 1), пропорциональный текущей толщине рыбы.-,, В начальном состоянии при отсутствии сигнала на выходе датчика 1 выходной сигнал с компараторов 2 и 3, а следовательно и с дизъюнктора 8 имеет нулевое значение, поэтому ключ 5 разомкнут. При достижении сигнала с датчика 1 порога компарирования + А (см. фиг. 2а) выходной сигнал с компаратора 2 принимает максимальное значение (фиг. 26), ключ 5 замыкается. Сигналы с выхода запоминающей ячейки бис датчика 1 выравниваются и компаратор 2 вновь возвращается в исходное состояние, ключ 5 размыкается, а аналоговая запоминающая ячейка 6 запоминает значение сигнала датчика 1 (фиг. 2а, кривая 2). Следующее срабатывание компаратора 2 и ключа 5 происходит в тот момент, когда сигнал с датчика 1 превыщает сигнал с анаЛОТОВОЙ запоминающей ячейки 6 на величину Л. В результате, на выходе дизъюнктора 8 формируются импульсы, частота которых пропорциональна скорости нарастания сигнала с датчика 1 и величине порога компарирования Л (фиг. 26). Под действием импульсов с компаратора 2 триггер 7 принимает состояние, соответствующее фиг. 2в, и импульсы с дизъюнктора 8 через конъюнктор 23 поступают на вход «вперед коммутатора 10. Шаговый двигатель 12 посредством реечной пары 13 и рычагов 14 раздвигает дисковые ножи 15, обеспечивая тем самым (например, при филетировании) слежение за изменениями толщины хребтовой кости рыбы. Если сигнал с датчика 1 начинает спадать по амплитуде, в работу вступает компаратор 3, имеющий порог компарирования -Д. При этом импульсы с компаратора 3 по истеченик момента времени ti перебрасывают триггер 7, и через конъюнктор 24 и дизъюнктор 25 начинают поступать на вход «назад коммутатор 10, и шаговый двигатель 16 сдвигает ножи 15. При выходе рыбы 28 из-под роликов 29 (момент перехода от времени ti к ts) сигнал с датчика резко спйдает, и под действием импульсов с дизъюнктора 8 шаговый двигатель 12 приводит ножи 15 к исходному состоянию., Для фиксирования исходного состояния ножей 15 используется конечный- выключатель 16. Он обеспечивает подачу импульсов с генератора 26 через конъюнктор 22 и дизъюнктор 25 на вход «назад коммутатора 10 при отсутствии сигнала с датчика 1. При замыкании конечного выключателя 16 через формирователь 27 производится сброс информации с аналоговой запоминающей ячейки 6 посредством ключа 39. Устройство по второму варианту работает следующим образом (см. фиг, 3 и 4). Появление сигнала на выходе датчика 1 приводит к срабатываний компаратора 4 и появлению импульсов (см. фиг. 4а, б) с датчика 36 перемещения транспортера через конъюнктор 37 на управляющих входах, ключей 5 и 33 и преобразователе 34 аналог-код. В моменты замыкания ключа 5 от очередного импульса с датчика 36 вход сумматора 30 через аналоговую запоминающую ячейку 6 подключается на время к выходу датчика 1. В результате, его выходной сигнал (фиг. 4в), определяемый разностьк) выходных сигналов с датчика 1 и ячейки 6 в период времени ti, равняется нулю. В момент/выключенлого состояния ключа 5 выходной сигнал аналоговой запоминающей ячейки 6 сохраняет свое предыдущее значение (фиг. 46, кривая 2) и выходное напряжение сумматора 30 (фиг. 4в) пропорционально разности между зафиксированным на промежутке времени t а сигналом с ячейки 6 и текущим значением сигнала с датчика 1. С помощью формирователя 31 модуля и второй аналоговой запоминающей ячейки 32 обеспечивается получение однополярного сигнала на-входе преобразователя 34, амплитуда которого соответствует максимуму сигнала с сумматора 30. Компаратором 35 фиксируется знак сигнала с сумматора 30 (фиг. 4д). Задним фронтом импульса с датчика 36 запускается преобразователь 34 аналог-код, и пачка импульсов с последнего через конъюнктор 23 поступает на вход «вперед коммутатора 10. . Если сигнал с датчика 1 начинает спадать, то компаратор 35 меняет свое .нулевое состояниена единичное, обеспечивая тем самьш поступление пачек импульсов с преобразователя 34 через конъюнктор 24 и дизъюнктор 25 на вход «назад коммутатора 10. В остальном работа устройства соответствует вышеописанному. Благодаря осуществлению процесса слежения рабочего органа за изменениями координат тела рыбы при выполнении операции фйлетирования рыбы улучшается качество разделки и увеличивается выход готовой продукции. Формула изобретения 1.Устройство для управления рабочими органами рыборазделочной машины, содержащее датчик измеряемого параметра рыбы, триггер, дизъюнктор и систему управления исполнительным механизмом, включающую щаговый двигатель с коммутатором и блок управления движением рабочего органа, отличающееся тем, что, с целью повышения точности и качества разделки рыб различных видов, оно снабжено аналоговой запоминающей ячейкой с ключом на входе и компаратором, при этом вход последнего связан с датчиком измеряемого параметра, а выходс системой управления исполнительным механизмом. 2.Устройство по п. 1, отличающееся тем, что оно снабжено двумя дополнительными компараторами, входы которых соединены с выходом датчика измеряемого параметра рыбы и со входом ключа, а выходы через триггер и дизъюнктор - с системой управления исполнительным механизмом. 3.Устройство по п. 1, отличающееся тем, что оно снабжено датчиком перемещения транспортера рыборазделочной машины, последовательно соединенными сумматором, формирователем модуля, дополнительной аналоговой запоминающей ячейкой с ключом на входе и преобразователем аналог-код, при этом датчик перемещения транспортера соединен через конъюнктор с ключами и преобразователем аналог-код, и входы сумматора связаны с выходом основной аналоговой запоминающей ячейки и выходом датчика измеряемого параметра р1)1бы, выход его - через компаратор подключен к системе управления исполнительным механизмом.
Источники информации; принятые во внимание при экспертизе . Авторское свидетельство СССР
233562, кл. А 22 С 25/16, 1968. 2. Авторское свидетельство СССР
538702, кл. А 22 С 25/14, 1976.

| название | год | авторы | номер документа |
|---|---|---|---|
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU682207A1 |
| Устройство для управления рабо-чиМи ОРгАНАМи РыбООбРАбАТыВАющЕйМАшиНы | 1979 |
|
SU835401A1 |
| Устройство для настройки рабочего органа рыборазделочной машины | 1974 |
|
SU611600A1 |
| Устройство для настройки рабочих органов однооперационной рыборазделочной машины | 1974 |
|
SU538702A1 |
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU659125A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1980 |
|
SU923494A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
| Устройство для автоматической настройки рабочего органа рыборазделочной машины | 1980 |
|
SU921493A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1978 |
|
SU740213A1 |
L
,Ч . 4i.
Фи.г
Г
фие.
