Изобретение предназначено для работы в системах гидроавтоматики в качестве программно управляемого привода золотника гидроусилителя, может быть использовано в электрогидравлических приводах машин, станков, роботов и является усовершенствованием изобретения по авт ев, N 744147.
Известен сервомеханизм с цифровым управлением, содержащий толкатель, по которому перемещаются якоря со встроенными обмотками возбуждения, величина ходов которых двоично-взвешенная и ограничена внутренними и внешними упорами, а толкатель подпружинен
Недостаток известного цифрового сервомеханизма заклюнается в низкой надежности функционирования, обусловленной подвижными обмотками возбуждения вследствие большой вероятности обрыва токоведущих проводников.
Наиболее близким по технической сущности к предлагаемому цифровому приводу для управления золотником гидроусилителя является цифровой привод, содержащий корпус и последовательно расположенные в нем электромагниты по числу двоичных разрядов, обмотки которых установлены в корпусе неподвижно, а сердечники каждых двух соседних электромагнитов сочленены между собой мерным зазором, величина которого определяется ценой соответствующего двоичного разряда. Недостаток заключается в низкой надежности, обусловленной тем, что данный привод относится к тянущему типу, а, следовательно, для управления золотником необходим либо дополнительный узел жесткого крепления цифрового привода с золотником, либо дополнительный промежуточный механизм преобразования тянущего усилия в толкающее. Узел жесткого крепления и промежуточный механизм преобразования являются дополнительными элементами, уменьшающими надежность цифрового привода. Кроме того, жестко закрепленный к корпусу крайний сердечник ограничивает диапазон применения известного решения и не позволяет управлять зэлотникгами со средним положением и с зоной нечувствительности.
Целью изобретения является расширение диапазона применения и повышение надежности управления золотником гидроусилителя
I вставленная цель достигается тем, что в цифровом приводе, содержащем корпус с
сл
с
VI
4 Ю СЛ
ю о
|ЧЭ
неподвижным упором, последовательно размещенными неподвижными обмотками возбуждения и соответствующими им сердечниками, соединенными посредством элементов сочленения с двоично-взвешенными зазорами, электромагниты снабжены общим толкателем, причем в одном из сердечников выполнена глухая, а в каждом из остальных - сквозная осевая расточка для размещения толкателя.
Обмотки возбуждения расположены неподвижно в корпусе цифрового привода для управления золотником гидроусилителя. Соответствующие им сердечники также расположены последовательно и кинематически соединены друг с другом с двоично- взвешенными зазорами посредством элементов сочленения, содержащих осевые расточки. Все полюса (упор и сердечники) содержат сквозные осевые расточки, а последний сердечник - расточку с глухим концом. Внутри упора, сердечников и элементов сочленения оасположен общий толкатель, который одним концом нежестко соединен с подпружиненным в среднем по- ложении золотником гидроусилителя, а другим концом также нежестко соединен с последним сердечником. Такая конструкция предлагаемого технического решения позволяет повысить надежность цифрового привода благодаря нежесткому соединению толкателя с золотником (вследствие чего отсутствует узел крепления), а также расширить диапазон применения за счет возможности управления золотниками с зоной нечувствительности и со средним положением.
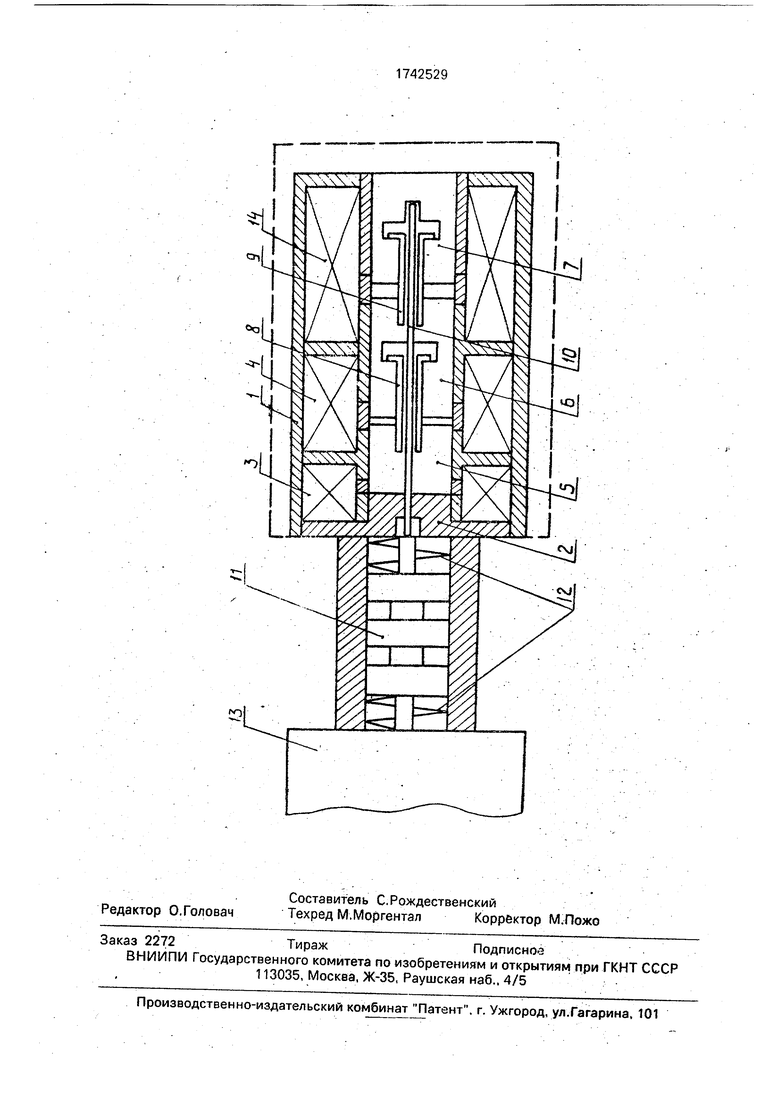
На чертеже показана схема цифрового привода для управления золотником гидроусилителя.
Цифровой привод содержит корпус 1 с неподвижным упором 2 и последовательно размещенные неподвижные обмотки 3, 4, 14 возбуждения, соседние сердечники 5-7 которых соединены с помощью элементов 8 и 9 сочленения. Электромагниты, образованные сердечником и охпатывающими их обмотками, снабжены общим толкателем 10. 8 крайнем правом сердечнике выполнена глухая, а в каждом из остальных - сквозная осевая расточка, в которой размещен толкатель 10 и который нежестко соединен с золотником 11, удерживаемым в среднем положении двумя центрирующими пружинами 12. Противоположный конец золотника 11 управляется с помощью аналогичного цифрового привода 13.
Цифровой привод для управления золотником гидроусилителя работает следующим образом.
Вначале подается питание на обмотку 3.
В результате сердечник 5 притягивается к упору 2. При этом перемещение золотника не происходит, а замыкается кинематическая цепь сочлененных сердечников 5-7 и устанавливаются двоично-взвешенные зэзоры между сердечниками 5 и 6. 6 и 7. При подаче управляющего напряжения, например, на обмотку 4 происходит взаимное притяжение сердечников 5 и 6, охваченных этой обмоткой. Однако сердечник 5 не сможет оторваться от упора 2 по закону Максвелла, а к нему будет притянут сердечник 6. При этом элемент 8 сочленения войдет в окно, расположенное в сердечнике 6, а тяговое усилие, развиваемое сердечником 6, передается с помощью жестко закрепленного к нему элемента 9 сочленения сердечнику 7, который, воздействуя глухим торцом осевого отверстия на толкатель 10, сместит золотник 11 влево на величину зазора, охваченного обмоткой 4.
При этом вся система якорей цифрового привода 13 сместится влево, поскольку напряжение питания на обмотках привода 13 отсутствует. В исходное состояние цифровой привод и золотник приходят в результате действия центрирующих возвратных пружин 12 при отключенном питании. При подаче напряжения питания на обмотку 14 описанные ранее процессы повторяются,
т.е. золотник 11 получает дополнительное перемещение.
Предложенная конструкция цифрового привода для управления золотником гидроусилителя по сравнению с прототипом позволяет, повысить надежность за счет исключения узла (или промежуточного механизма) жесткого соединения толкателя с золотником гидроусилителя и расширить диапазон применения устройства за счет
возможности управления золотниками, имеющими зону нечувствительности и среднее положение.
Формула изобретения Цифровой привод по авт. св. № 744147, отличающийся тем, что, с целью расширения диапазона применения и повышения надежности, его электромагниты снабжены общим толкателем, причем в од- ном из сердечников выполнена глухая, а в каждом из остальных - сквозная осевая расточки для размещения толкателя.
ЛГ)
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ПРИВОД | 1992 |
|
RU2037676C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1991 |
|
RU2014519C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| Цифровой привод | 1978 |
|
SU744147A1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ ОДНОСТОРОННЕГОДЕЙСТВИЯ | 1966 |
|
SU184635A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
| Линейный дискретный электропривод | 1986 |
|
SU1605297A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Двухкаскадный многосекционный гидравлический распределитель с электрическим управлением | 1988 |
|
SU1576743A1 |
| ГИДРАВЛИЧЕСКИЙ СЕРВОУСИЛИТЕЛЬ | 2003 |
|
RU2251631C1 |
Сущность изобретения: электромагниты снабжены общим толкателем. В одном из сердечников выполнена глухая, а в каждом из остальных - сквозная расточка для размещения толкателя 1 ил
| Цифровой привод | 1978 |
|
SU744147A1 |
