Изобретение относится к технике автоматического управления, в частности к технике формирования управляющих сигналов.
Известен релейный регулятор, содер- жащий сравнивающее устройство, фильтр, инерционное звено, многопороговый импульсный преобразователь, трехпозицион- ный релейный элемент и суммирующий усилитель.
Недостаток этого регулятора состоит в сложности его реализации, а также в том, что при ограничении входного сигнала регулируемой координаты линии переключения системы управления, использующей этот регулятор, будут изменяться в зависимости от уровня ограничения входных сигналов, при этом возрастают энергозатраты на управление, время переходного процесса и перерегулирование
Наиболее близким техническим решением к предлагаемому является устройство, содержащее шину сигнала ре улируемой координаты, шину скорости регулируемой координаты, первый и второй интеграторы, первый, второй, третий и четвертый релейные элементы, при этом шина сигнала регулируемой координаты подключена к входам первого и второго релейных элементов
Недостаток этого устройства состоит в том, что при ограничении сигналов регулируемой координаты и скорости регулируемой координаты линии переключения системы управления, использующей это устройство, будут изменяться в зависимости от уровня ограничения, при этом возрастают энергозатраты на управление, время переходного процесса и перерегулирование.
Цель изобретения - исключение влияния ограничения сигналов регулируемой ко- ординаты и скорости регулируемой координаты на процесс управления, снижение энергозатрат, уменьшение перерегулирования и времени переходного процесса
Сущность изобретения состоит в том, что в релейный регулятор, содержащий шину сигнала регулируемой координаты, шину скорости регулируемой координаты, первый и второй интеграторы, первый, второй, третий и четвертый релейные элементы, при этом шина сигнала регулируемой координаты подключена к входам первого и второго релейных элементов, дополнительно введены первый, второй, третий, четвертый, пятый и шестой элементы И, первый, второй, третий, четвертый и пятый элементы ИЛИ и пятый релейный элемент, при этом выход первого релейного элемента соединен с первыми входами первого, четвертого и m того элементов И, выход второго релейного
элемента соединен с первыми входами второго, третьего и шестого элементов И, выход третьего релейного элемента соединен с вторыми входами первого и третьего элементов И, выход четвертого релейного элемента соединен с вторыми входами второго и четвертого элементов И, выход первого элемента И подключен к первым входам первого и третьего элементов ИЛИ. выход второго элемента И подключен к второму входу первого элемента ИЛИ и первому входу четвертого элемента ИЛИ, выходы третьего и четвертого элементов И соединены соответственно с первым и вторым входами второго элемента ИЛИ, выход которого подключен к инвертирующему входу второго интегратора, неинвергирующий вход которого соединен с выходом первого элемента ИЛИ а выход второго интегратора соединен с входом пятого релейного элемента, выход которого подключен к вторым входам пятого и шестого элементов И, соединенных своими выходами соответственно с вторы ми входами третьего и четвертого элементов ИЛИ, выходы которых подключены соответственно к первому и второму входам пятого элемента ИЛИ, инверсный выход которого соединен с входом обнуления вторе- го интегратора, шина скорости регулируемой координаты соединена с входом первого ин-.еграторз выход которого подключен к входам третьего /, четеертого релейных элементов, причем выход третьего элемента ИЛИ соединен, с шиной от рица- тельного выходно 0 сигнала, выход четвертого элемента ИЛИ соединен с шиной положительного выходного сигнала
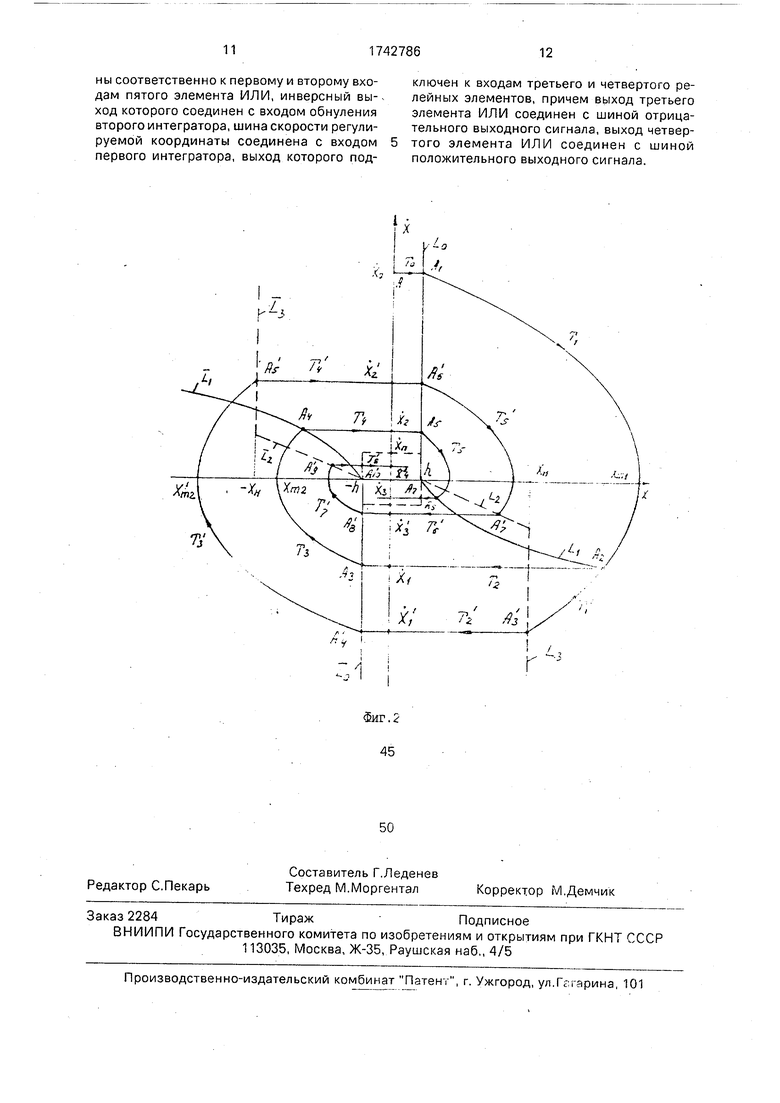
На фиг. 1 представлена схема релейного регулятора, на фиг. 2 - фазовые траекто- оии системы управления, использующей данный релейный регулятор.
Шина 1 скорости регулируемой координаты соединена с входом первого и второго релейных элементоз 3 и 4 соответственно, а шина 2 скорости регулируемой координаты соединена с входом первого интегратора 5 выход которого подключен к входам третьего п четвертого релейных элементов 6 и 7 сое летственно Выход первого релейного лемонта 3 соединен с первыми входами соответственно первого, четвертого и пятого элементов И 8, 11 и 12 выход вгоро о релейного элемента 4 соединен с первыми входами соответственно второго, т рэтьего и шестого элеме гов И 9, 10 и 13, выход з реть- его релейного элемента 6 соед чнек с вторыми входами соответственно :пього i сетьего элементос И 8 и 10, выльп - тзер- го о ррлейного элемент оедиы . г вто- РЧМИ входами соответс . енно второю и
четвертого элементов И 9 и 11. Выход первого элемента И 8 подключен соответственно к первым входам первого и третьего элементов ИЛИ 14 и 16, выход второго эле- мента И 9 подключен к второму входу первого элемента ИЛИ 14 и первому входу четвертого элемента ИЛИ 17, выходы третьего и четвертого элементов И 10 и 11 соеди- нены соответственно с первым и вторым входами элемента ИЛИ 15, выход которой подключен к инвертирующему входу второго интегратора 19, соединенного своим выходом с входом пятого релейного элемента 20, выход которого подключен к вторым входам пятого и шестого элементов И 12 и 13 соответственно. Выход пятого элемента И
12соединен с вторым входом третьего элемента ИЛИ 16. Выход шестого элемента И
13соединен с вторым входом четвертого элемента ИЛИ 17. Выход третьего элемента ИЛИ 16 подключен к шине 21 отрицательного выходного сигнала и первому входу пятого элемента ИЛИ 18. Выход четвертого элемента ИЛИ 17 подключен к шине 22 положительного выходного сигнала и второму входу пятого элемента ИЛИ 18, инверсный выход которого соединен с входом обнуления второго интегратора, неинвертирую- щий вход которого подключен к выходу первого элемента ИЛИ 14.
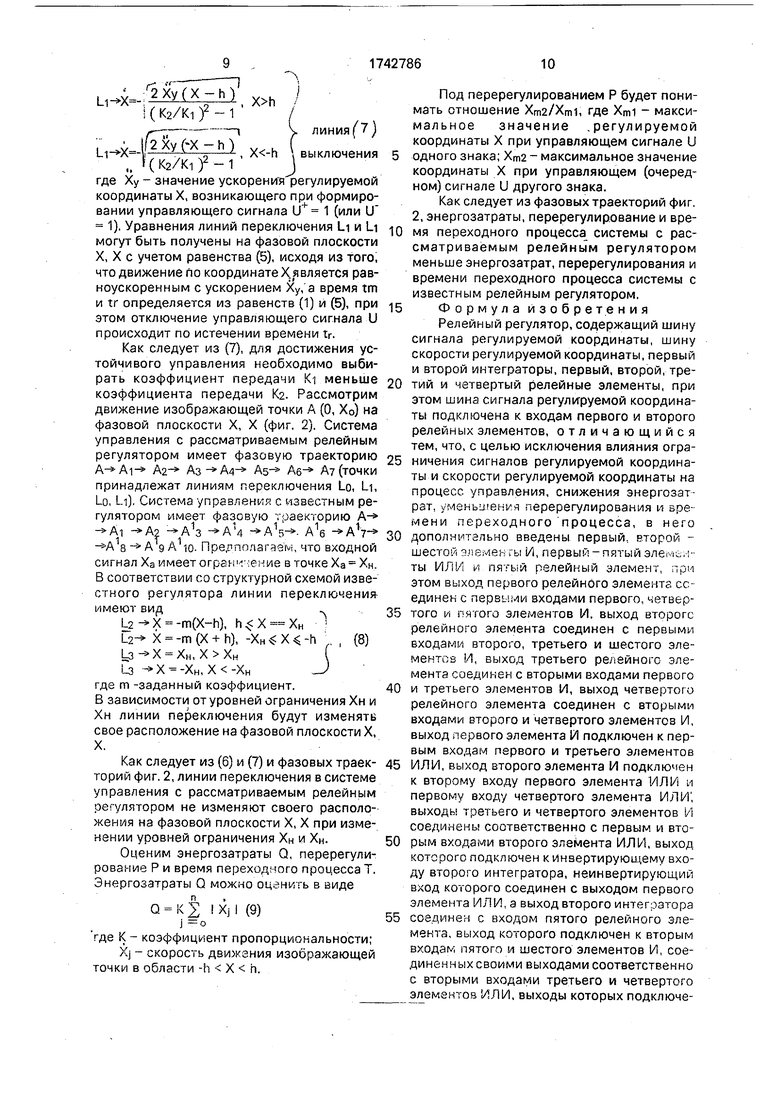
На фиг. 2 X - регулируемая координата, X - скорость регулируемой координаты, LO, LI, , i-з, Lo, U, 1.2И 13-линии переключения на фазовой плоскости X, X.
Релейный регулятор работает следующим образом.
Пусть на вход релейного регулятора поступают сигналы Ха - сигнал регулируемой координаты (шина 1) и сигнал Хв - сигнал скорости регулируемой координаты (шина 2). Считаем, что сигнал Ха имеет ограничение в некоторой точке Хн (в этом состоит отличие Ха от регулируемой координаты X), а сигнал Хв имеет ограничение в некоторой точке Хн (в этом состоит отличие Хв от скорости регулируемой координаты X). Предположим, что выходной сигнал первого интегратора 5 I имеет ограничение такое, что - 5 I д , где д - заданная величина. Рассмотрим работу такого интегратора. Пусть Хв 0. Через некоторое время выходной сигнал I станет равным д . В этом состоянии первый интегратор 5 будет находиться до тех пор, пока Хв 0. Пусть в некоторый момент времени to Хв 0, а затем этот сигнал начал уменьшаться (Хв 0). С этого момента времени начнет уменьшаться и сигнал I. Через некоторое время Дт сигнал I станет равным - д, т.е. изменение состояния первого интегратора 5 происходит после изменения знака сигнала Хв, при этом за время изменения состояния этого интегратора от I д до I -д сигнал регулируемой координаты изменяется на величину ДХ
2 д , так как Дх /|°+Лг XB dt 2д .
Аналогичные;рассуждения можно провести и для случая Хв 0.
Таким образом, изменение состояния первого интегратора 5 от I 5до I - -д и наоборот происходит после изменения знака Хв. выбрать достаточно малой величиной, то можно считать, что изменение состояния интегратора 5(происходит при изменении знака сигнала Хв.
Пусть сигнал Ха увеличивается от нуля (). ПриХа h(h-уровень срабатывания и отпускания второго релейного элемента 4) выходные сигналы первого и второго релейных элементов 3 и 4 соответственно равны RI 0 и R2 О (О обозначает низкий уровень выходного сигнала). Выходные сигналы первого 8, второго 9, третьего 10 и четвертого 11 элементов И соответственно равны RS 0, Rg О, Rio 0 и Rn 0. Выходкой сигнал третьего элемента ИЛИ 16 U 0 (шина 21 отрицательного выходного сигнапа), выходной сигнал четвертого элемента ИЛИ 17 U+ 0 (шина 22 положительного выходного сигнала), вследствие чего инверсный выходной сигнал пятого элемен та ИНН 18 Re 1 (1 обозначает высокий уровень выходного сигнала) и этот сигнал производит обнуление второго интегратора 19 (выходной сигнал этого интегратора S 0).
При Хв 0 выходной сигнал первого интегратора 5 I д . В этом случае срабатывает четвертый релейный элемент7 (его уровень срабатывания и отпускания выбирается равным д) и его выходной сигнал R/I 1. Этот сигнал разрешает прохождение сигналов через второй и четвертый элементы И 9 и 11. При Ха h срабатывает второй релейный элемент 4 и его выходной сигнал R2 1. Так как 1, то и Rg 1 Выходные сигналы первого 14 и второго 17 элементов ИЛИ будут соответственно равны 1 и UT- 1. С этого момента времени формируется положительный выходной сигнал U+ 1 и одновременно выходной сигнал первого элемента ИЛИ 14 Ri4 1 подается на неинвертирующий вход второго интегратора 19 с коэффициентом передачи Ki, a выходной сигнал пятого элемента ИЛИ 18 RG О (IK 1) снимает обнуление второго интегратора 19. С этого момента времени t TO второй интегратор 19 осуществляет интегрирование сигнала Ri4 1 со скоростью, определяемой коэффициентом KL
При достижении выходным сигналом S второго интегратора 19 значения Д срабатывает пятый релейный элемент 20 ( Д- уровень срабатывания и отпускания этого релейного элемента, Д - малая величина) и его выходной сигнал Rg 1 подается на входы пятого 12 и шестого 13 элементов И. Так как RI О, R2 1. то выходные сигналы пятого и шестого элементов И 12 и 13 равны соответственно Ri2 0 и Ri3 1. Сигнал RIS 1 через четвертый элемент ИЛИ 17 поддерживает высокий уровень сигнала U+. Состояние схемы не будет изменяться до тех пор, пока не изменится знак сигнала Хв. Пусть это произойдет в момент времени ti. За время от го до ti сигнал S второго интегратора 19 будет равен
S Sm Ki / Ru dt Ki (ti - to) (1)
Сигнал S представляет собой эталонный нарастающий сигнал, формируемый при нарастании абсолютного значения регулируемой координаты. Максимальное значение этого сигнала Sm. В момент времени TI выходной сигнал первого интегратора 5 начинает уменьшаться, выключается четвертый элемент 7 и по истечении небольшого времени At I станет равным - д. В этот момент времени срабатывает третий релейный элемент 6 (уровень срабатывания и отпускания этого релейного элемента равен - - д.). Выходные сигналы третьего 6 и четвертого 7 релейных элементов соответственно равны Рз 1 и R4 0. Сигнал R3 1 разрешает прохождение сигнала R2 1 через третий элемент И 10 на вход второго элемента ИЛИ 15, выходной сигнал которого RIS 1 подается на инвертирующий вход второго интегратора 19 с коэффициентом передачи К2. Сигнал R4 0 запрещает прохождение сигнала R2 1 через второй элемент И 9 и его выходной сигнал Rg 0, значит и RH О (сигнал на неинвертирующем входе второго интегратора 19).
С момента времени ti вторым интегратором 19 начинает формироваться компенс сирующий сигнал S в виде
S Sm К2 Ris dt К2 (t2 - ti) (2)
где t2 некоторый момент времени, а шестой элемент И 13 и четвертый элемент ИЛИ 17 формируют дополнительный релейный управляющий сигнал U 1 (R2 1, RS 1, R4 0). Выходной сигнал S второго интегратора 19 будет равен
S Sm - S,(3)
При достижении сигналом S значения Д выключается пятый релейный элемент 20 и его выходной сигнал R5 0 запрещает прохождение сигнала R2 1 через шестой
элемент И 13 на вход четвертого элемента ИЛИ 17 и его выходной сигнал LT становится равным нулю. Одновременно выходной сигнал пятого элемента ИЛИ 18 Re 1 производит обнуление второго интегратора 21.
Пусть S Д в момент времени t2. Для этого момента времени с учетом (2) и (3) имеем
S Д Sm - К2 (t2 - ti) Ki (t - to) K2 (tz - ti) (4)
Так как Дмалая величина, то из (4) имеем
, К1
tr (t2 - ti) - tm,
(5)
где tm (ti - to).
Таким образом, формирование выходного управляющего сигнала U+ 1 начинается с момента времени to, при котором Ха h. С этого момента времени до момента времени ti, т.е. в течение времени, пока Хв
о, второй элемент И 9 и четвертый элемент ИЛИ 17 формируют выходной сигнал U+ 1, а второй интегратор 19 формирует эталонный нарастающий сигнал Sm. С момента времени ti до момента времени t2 второй
интегратор 19 формирует компенсирующий нарастающий сигнал Sm, а пятый релейный элемент 20, шестой элемент И 13 и четвертый элемент ИЛИ 17 формируют дополнительный релейный управляющий сигнал U+
1.
Аналогично схема работает и при уменьшении Ха от нуля (Хв 0). В этом случае срабатывают первый 3 и третий 6 релейные элементы, первый 8, третий 10 и пятый 12
элементы И и второй 15 и третий 16 элементы ИЛИ формируют релейный управляющий сигнал U 1 (шина отрицательного выходного сигнала 21).
Рассмотрим процесс управления на фазовой плоскости X, X на примере управления инерционным объектом второго порядка с передаточной функцией W0(P) 1/Р2. Состояние объекта управления определим координатами X и X. Если управляющий сигнал U О (U+ О, U 0), то фазовые траектории - линии, параллельные оси X. Если управляющий сигнал U 1 (U+ 1) или U -1 (L) 1), то фазовые траектории параболы симметричны относительно оси X.
Уравнения линий переключения имеют вид
LO h, 1 линии включения U - X -h,)(6)
.2Xy()
(K2/Ki )2 -1
;, (-X - h ) ( K2/Ki )2 - 1
линия
(П
выключения
где Xy - значение ускорения регулируемой координаты X, возникающего при формировании управляющего сигнала U+ 1 (или 1Г 1). Уравнения линий переключения Li и U могут быть получены на фазовой плоскости X, X с учетом равенства (5), исходя из того, что движение по координате Х.является равноускоренным с ускорением Ху, а время tm и tr определяется из равенств (1) и (5), при этом отключение управляющего сигнала U происходит по истечении времени tr.
Как следует из (7), для достижения устойчивого управления необходимо выбирать коэффициент передачи Ki меньше коэффициента передачи К2. Рассмотрим движение изображающей точки А (О, Х0) на фазовой плоскости X, X (фиг. 2). Система управления с рассматриваемым релейным регулятором имеет фазовую траекторию А2 А&- Аб- А (точки принадлежат линиям переключения , U, Lo, LI). Система управления с известным регулятором имеет фазовую траекторию А- . А16 А э А1 ю- Предполагаем, что входной сигнал Ха имеет огргнч в точке Ха Хн. В соответствии со структурной схемой известного регулятора линии переключения- имеют ..
L2 - X -m(X-h), h : X Хн
L2 X - -m (X + h), -Хн «: X -h ,. , (8)
Уз - X Хн, X Хн
L-3 X -Хн, X -Хн где m -заданный коэффициент. В зависимости от уровней ограничения Хн и Хн линии переключения будут изменять свое расположение на фазовой плоскости X, X.
Как следует из (6) и (7) и фазовых траекторий фиг. 2, линии переключения в системе управления с рассматриваемым релейным реп/лятором не изменяют своего расположения на фазовой плоскости X, X при изменении уровней ограничения Хн и Хн.
Оценим энергозатраты Q, перерегулирование Р и время переходного процесса. Энергозатраты Q можно оценить в виде
Q К J I Xj I (9)
j -о
где К - коэффициент пропорциональности; Xj - скорость движения изображающей точки в области -h X h.
Под перерегулированием Р будет понимать отношение Xm2/Xmi, где Хт1 - максимальное значение .регулируемой координаты X при управляющем сигнале U
5 одного знака; Хт2 - максимальное значение координаты X при управляющем (очередном) сигнале U другого знака.
Как следует из фазовых траекторий фиг. 2, энергозатраты, перерегулирование и вре10 мя переходного процесса системы с рассматриваемым релейным регулятором меньше энергозатрат, перерегулирования и времени переходного процесса системы с известным релейным регулятором.
15 Формула изобретения
Релейный регулятор, содержащий шину сигнала регулируемой координаты, шину скорости регулируемой координаты, первый и второй интеграторы, первый, второй, тре20 тий и четвертый релейные элементы, при этом шина сигнала регулируемой координаты подключена к входам первого и второго релейных элементов, отличающийся тем, что, с целью исключения влияния огра25 ничения сигналов регулируемой координаты и скорости регулируемой координаты на процесс управления, снижения энергозатрат, уменьшена перерегулирования и времени переходного процесса, в него
30 дополнительно введены первый, второй - шестой 4Ji8Mftf- Ы И, первый-пятый элемо.;- ты ИЛИ и пятый релейный элемент, лри этом выход первого релейного элемента соединен с первыми входами первого, четвер35 того и пятого элементов И, выход второго релейного элемента соединен с первыми входами второго, третьего и шестого элементов И, выход третьего релейного элемента соединен с вторыми входами первого
40 и третьего элементов И, выход четвертого релейного элемента соединен с вторыми входами второго и четвертого элементов И, выход первого элемента И подключен к первым входам первого и третьего элементов
45 ИЛИ, выход второго элемента И подключен к второму входу первого элемента VIЛ И и первому входу четвертого элемента ИЛИ , выходы третьего и четвертого элементов И соединены соответственно с первым и вто50 рым входами второго элемента ИЛИ, выход которого подключен к Инвертирующему входу второго интегратора, неинвертирующий вход которого соединен с выходом первого элемента ИЛИ, а выход второго интегратора
55 соединен с входом пятого релейного элемента, выход которого подключен к вторым входам пятого и шестого элементов И, соединенных своими выходами соответственно с вторыми входами третьего и четвертого элементов ИЛИ, выходы которых подключены соответственно к первому и второму входам пятого элемента ИЛИ, инверсный вы-лейных элементов, причем выход третьего
ход которого соединен с входом обнуленияэлемента ИЛИ соединен с шиной отрицавторого интегратора, шина скорости регули-тельного выходного сигнала, выход четверруемой координаты соединена с входом5 того элемента ИЛИ соединен с шиной
первого интегратора, выход которого под-положительного выходного сигнала.
ключен к входам третьего и четвертого ре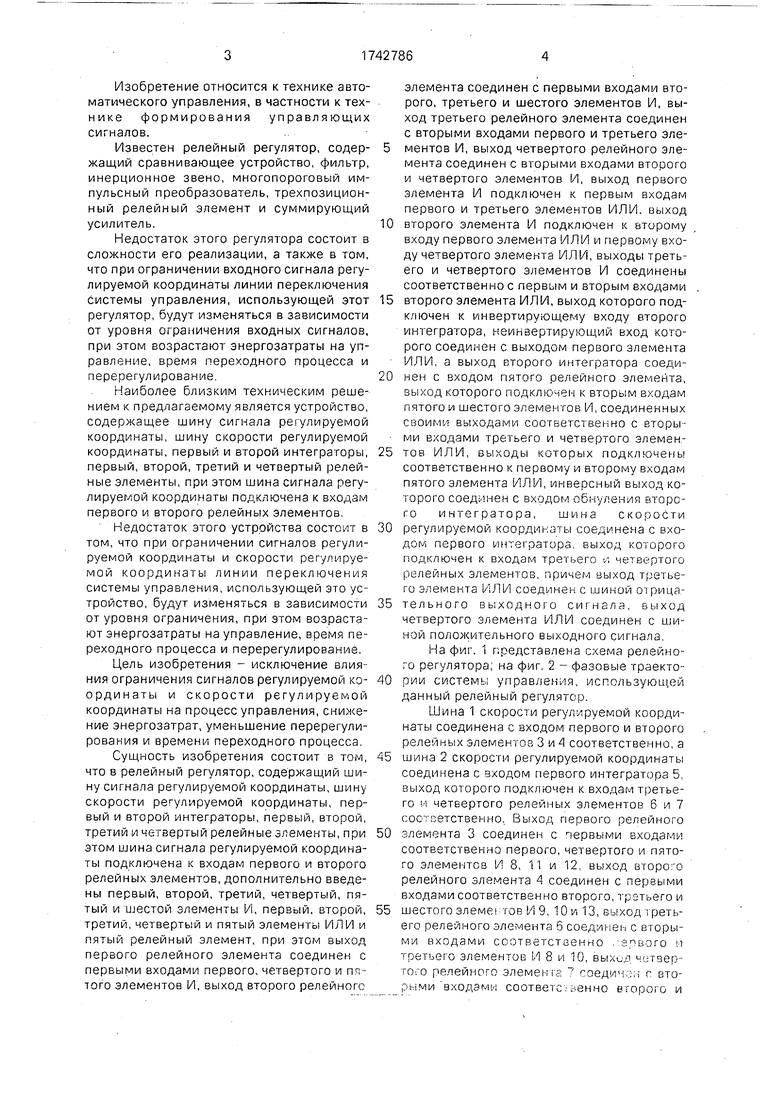
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопороговый релейный элемент с опережающей характеристикой | 1989 |
|
SU1629977A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2015 |
|
RU2606149C2 |
| Способ формирования трехуровневого управляющего сигнала в релейных системах управления динамическим объектом и релейный регулятор для механизации этого способа | 1989 |
|
SU1777119A1 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2007 |
|
RU2359305C2 |
| Способ формирования трехуровнего сигнала в релейных системах управления динамическим объектом и релейный регулятор для его осуществления | 1989 |
|
SU1758633A1 |
| Динамический фильтр | 1991 |
|
SU1828551A3 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2385480C1 |
Изобретение относится к тех ника матического управления. Целью / Обретения является исключение влияния ограничения сигналов регулируемой координаты и скорости регулируемой координаты на процесс регулирования, снижение энергозатрат и уменьшение перерегулирования и времени переходного процесса. В релейном регуляторе шина сигнала регулируемой координаты соединена с входами первогс 3 и второго 4 релейных элементов, а шина скорости регулируемой координаты 2-е первым интегратором 5, выход которого соединен с входами третьего 6 и четверJ того 7 релейных элементов. Сигнал первого релейного элемента 3 подается на входы схем И 8,11 и 12, а сигнал второго релейного элемента 4 - на входы схем И 9, 10 и 13. С выхода схемы И 8 сигнал через схему ИЛИ 16 формирует отрицательный выходной сигнал, а через схему ИЛИ 14 подается на инвертирующий вход второго интегратора 19. С выхода элемента И 9 сигнал через схему ИЛИ 17 формирует положительный выходной сигнал, который через схему ИЛИ 18 снимает обнуление второго интегратора 19. Сигнал с выхода схем И 10 или 11 через схему ИЛИ 15 подается на инвертирующий вход второго интегратора 19. Сигнал с выхода пятого релейного элемента 20 через схемы И 12 и 13 прекращает формирование выходных сигналов. Такое формирование выходных сигналов исключает влияние ограничения сигналов регулируемой координаты и скорости регулируемой координаты на процесс управления. 2 ил. сл С -л VJ 4 N3 Ч 00 о 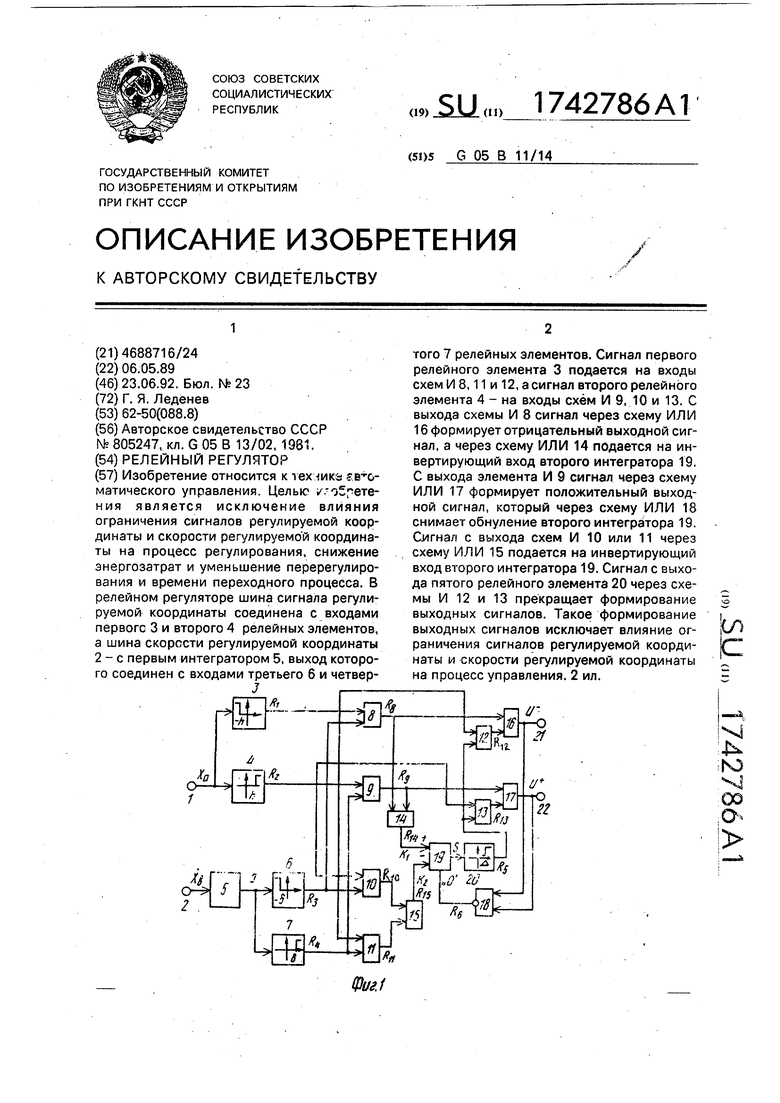
Фиг. 2 45
50
| Способ управления | 1975 |
|
SU805247A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
