сл
с


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования трехуровнего сигнала в релейных системах управления динамическим объектом и релейный регулятор для его осуществления | 1989 |
|
SU1758633A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2385480C1 |
| Релейный регулятор | 1989 |
|
SU1742786A1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| Импульсно-релейный регулятор | 1984 |
|
SU1228072A1 |
| Многопороговый релейный элемент с опережающей характеристикой | 1989 |
|
SU1629977A1 |
Изобретение относится к технике автоматического управления и позволяет обеспечить оптимальный по быстродействию переходный процесс и исключить перерегулирование. Для этого с момента изменения
ч VJ
VI
О
знака скорости изменения рассогласования формируют форсирующий релейный управляющий сигнал и вспомогательный сигнал до момента равенства сигнала рассогласования и вспомогательного сигнала. В релейном регуляторе вход сигнала рассогласования 1 соединен с входами первого и второго релейных элементов 3 и 4 и входами первого и второго сумматоров 16 и 17, а вход скорости регулируемой координаты 2 соединен с входами третьего и четвертого релейных элементов 5 и 6 и входами . первого и второго интеграторов 14 и 15. При увеличении входного сигнала срабатывает четвертый релейный элемент б, выходной сигнал которого через седьмой элемент И 13 и второй элемент ИЛИ 25 поступает на выход отрицательного сигнала 27. При отпускании четвертого релейного элемента 6 его выходной сигнал через первый элемент И 7 и второй элемент И 8 устанавливает первый триггер 22 в состояние 1 и его выходной сигнал поступает на вход второго элемента ИЛИ 25, открывает первый ключ 18 и разреИзобретение относится к технике автоматического управления, в частности к технике формирования управляющих сигналов.
Известен способ формирования управляющего сигнала в релейно-импульсных системах управления динамическим объектом, основанный на том, что в зависимости от ошибки управления формируют импульсный управляющий сигнал и релейный управляющий сигнал путем создания скользящего режима.
Недостаток этого способа состоит в сложности его реализации, а также в том, что он не обеспечивает высокого быстродействия переходного процесса и не исключает перерегулирование.
Известен релейно-импульсный регулятор, реализующий указанный способ и содержащий сравнивающее устройство, фильтр, инерционное звено, многопороговый импульсный преобразователь, трехпо- зиционный релейный элемент и суммирующий усилитель.
Недостаток этого регулятора состоит с сложности его реализации, а также в том, что он не обеспечивает высокого быстродействия и не исключает перерегулирование.
Наиболее близким к изобретению является способ, включающий измерение сигналов рассогласования и скорости изменения
шает формирование вспомогательного сигнала, при равенстве которого с входным сигналом срабатывает пятый релейный элемент 20, и через третий элемент И 9 устанавливает первый триггер 22 в состояние 1. Аналогично при уменьшении входного сигнала срабатывает третий релейный элемент 5 и его выходной сигнал через шестой элемент И 12 и первый элемент ИЛИ 24 поступает на выход положительного сигнала 26. При отпускании третьего релейного элемента 5 его выходной сигнал через первый элемент И 7, четвертый элемент И 10 устанавливает в состояние 1 второй триггер 23, выходной сигнал которого поступает на вход первого элемента ИЛИ 24 и открывает второй ключ 19. При срабатывании шестого релейного элемента 21 второй триггер 23 через первый элемент И 11 возвращается в состояние О. Такое формирование выходных сигналов обеспечивает оптимальный по быстродействию переходный процесс и исключает перерегулирование. 2 с.п. ф-лы, 2 ил.
рассогласования и при превышении этими сигналами зоны нечувствительности формирование релейного управляющего сигнала, знак которого противоположен знаку скорости изменения рассогласования.
Недостаток этого способа состоит в том, что он имеет низкое быстродействие и не обеспечивает исключения перерегулирования.
Наиболее близким к релейному регулятору является устройство, содержащее четыре релейных элемента, два интегратора, два сумматора, причем входы первого и второго релейных элементов объединены и являются входом сигнала рассогласования регулятора, входы третьего и четвертого релейных элементов объединены и являются входом сигнала скорости изменения рассогласования регулятора, выход первого интегратора подключен к первому входу первого сумматора, а выход второго интегратора подключен к первому входу второго сумматора.
Недостаток этого устройства состоит в
том, что оно имеет низкое быстродействие и не обеспечивает исключения перерегулирования.
Цель изобретения - сокращение времени переходного процесса и исключение перерегулирования.
Сущность изобретения состоит в том. что способ формирования трехуровневого
управляющего сигнала, включающий измерение сигналов рассогласования и при превышении этими сигналами зоны нечувствительности формирование релейного управляющего сигнала, знак которого противоположен знаку скорости изменения рассогласования, предполагает с момента изменения знака скорости рассогласования формирование совпадающего с ним по знаку форсирующего релейного управляющего сигнала, в течение действия которого прерывают формирование демпфирующего релейного управляющего сигнала и образуют вспомогательный сигнал путем интегрирования скорости изменения рассогласова- ния, при этом формирование форсирующего релейного управляющего сигнала заканчивают в момент равенства абсолютных значений сигнала рассогласования и вспомогательного сигнала, а трех- уровневый управляющий сигнал образуют в виде суммы форсирующего и демпфирующего управляющих сигналов.
В релейный регулятор, содержащий четыре релейных элемента, два интегратора, два сумматора, причем входы первого и вто- . рого релейных элементов объединены и являются входом сигнала рассогласования регулятора, входы третьего и четвертого релейных элементов объединены и являются входом сигнала скорости изменения рассогласования регулятора, выход первого интегратора подключен к первому входу первого сумматора, а выход второго интегратора подключен к первому входу второго сумма- тора, дополнительно введены семь элементов И, два триггера, два ключа, два элемента ИЛИ, пятый и шестой релейные элементы, при этом вход сигнала рассогласования регулятора соединен с вторыми входами пер- вого и второго сумматоров, вход скорости изменения рассогласования регулятора соединен с входами первого и второго интеграторов, выход первого релейного элемента соединен с первым входом четвертого эле- мента И, выход второго релейного элемента соединен с первым входом второго элемента И, прямой выход третьего релейного элемента соединен с первым входом шестого элемента И, прямой выход четвертого ре- лейного элемента соединен с первым входом седьмого элемента И, инверсные выходы третьего и четвертого релейных элементов соединены соответственно с первым и вторым входами первого элемента И, вы- ход которого соединен с вторыми входами второго и четвертого элементов И, прямые выходы которых соединены соответственно с входом установки в 1 первого и второго триггеров, а инверсные выходы этих элементов соединены соответственно с первыми входами третьего и пятого элементов И, вторые входы которых соединены соответственно с выходами пятого и шестого релей- ных элементов, соединенных входами соответственно с выходами первого и второго ключей, сигнальные входы которых соединены соответственно с выходами первого и второго сумматоров, управляющий вход первого ключа соединен с прямым выходом первого триггера и первым входом второго элемента ИЛИ, управляющий вход второго ключа соединен с прямым выходом второго триггера и первым входом первого элемента ИЛИ, второй вход которого соединен с выходом шестого элемента И, соединенного вторым входом с инверсным выходом первого триггера и входом установки в ,0 первого интегратора, выход третьего элемента И соединен с входом установки в О первого триггера, выход пятого Элемента И соединен с входом установки в О второго триггера, инверсный выход которого соединен с входом установки в О второго интегратора и вторым входом седьмого элемента И, соединенного выходом с вторым входом второго элемента ИЛИ, выход которого соединен с выходом отрицательного сигнала регулятора, а выход первого элемента ИЛИ соединен с выходом положительного сигнала регулятора.
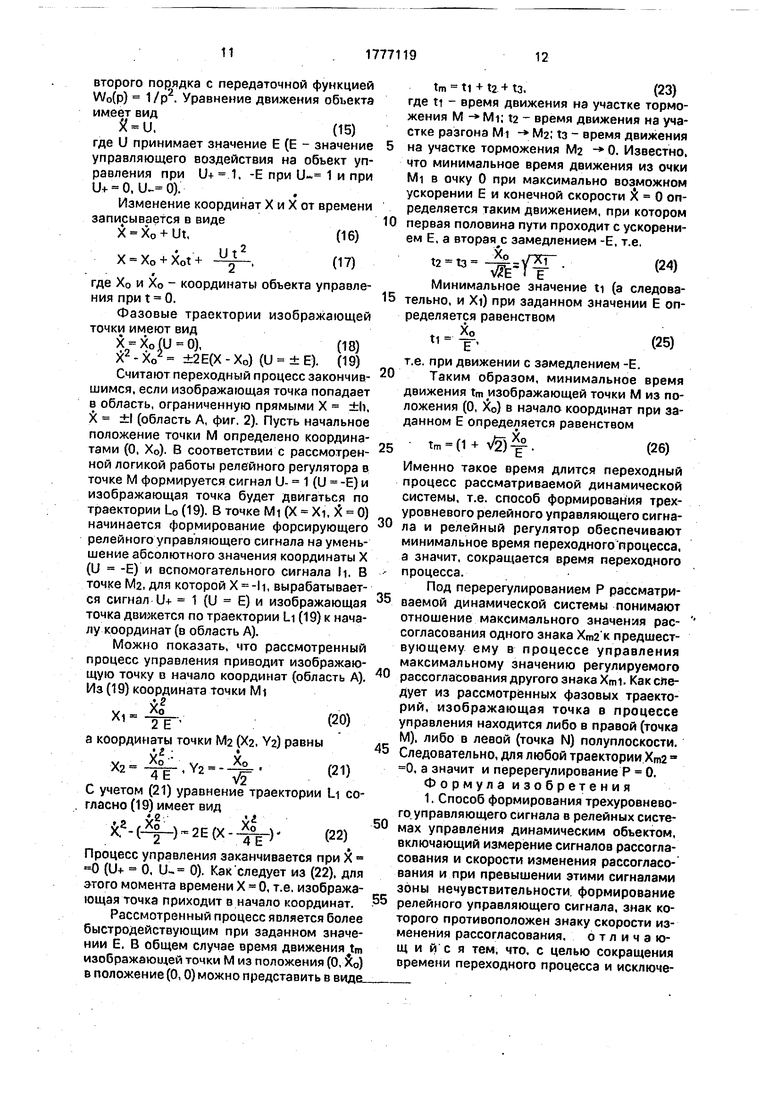
На фиг. 1 представлена схема релейного регулятора, реализующего способ формирования трехуровневого управляющего сигнала: на фиг. 2 - фазовые траектории системы управления, использующей релейный регулятор.
Вход сигнала рассогласования регулятора 1 соединен с входами первого 3 и второго 4 релейных элементов и вторыми входами первого 16 и второго 17 сумматоров. Вход сигнала скорости изменения рассогласования регулятора 2 соединен с входами третьего 5 и четвертого б релейных элементов и входами первого 14 и второго 15 инверторов. Выход первого релейного элемента 3 подключен к первому входу чет- вертого элемента И 10, выход второго релейного элемента 4 подключен к первому входу второго элемента И 8, прямой выход третьего релейного элемента 5 соединен с первым входом шестого элемента И 12, прямой выход четвертого релейного элемента 6 соединен с первым входом седьмого элемента И 13. инверсные выходы третьего и четвертого релейных элементов 5 и 6 соеди нены соответственно с первым и вторым входами первого элемента И 7, выход которого подключен к вторым входам второго 8 и четвертого 10 элементов И, прямые выходы которых соединены соответственно с входом установки в 1 первого 22 и второго 23 триггеров, инверсные выходы этих элементов соединены соответственно с первыми входами третьего 9 и пятого 11 элементов И, вторые входы которых подключены соответственно к выходам пятого 20 и шестого 21 релейных элементов. Первый интегратор 14, первый сумматор 16, первый ключ 18 и пятый релейный элемент 20 соединены последовательно. Также последовательно соединены второй интегратор 15, второй сумматор 17, второй ключ 19 и шестой релейный элемент 21. Выходы третьего 9 и пятого 11 элементов И соединены соответственно с входами установки.в, О первого и второго триггеров 22 и 23. Прямой выход первого триггера 22 подключен к управляющему входу первого ключа1 18 и первому второго элемента ИЛИ 25, инверсный выход первого триггера 22 подсоединен к входу установки в О первого интегратора 14 и второму входу шестого элемента И 12. Прямой выход второго триггера 23 соединен с управляющим входом второго ключа 19 и первым входом первого элемента ИЛИ 24, инверсный выход второго триггера 23 соединен с входом установки в О второго интегратора 15 и вторым входом седьмого элемента И 13. Выходы шестого 12 и седьмого 13 элементов И соединены соответственно с вторыми входами первого 24 и второго 25 элементов ИЛИ, выходы которых являются соответственно выходом положительного сигнала регулятора 26 и выходом отрицательного сигнала регулятора 27.
На фит. 2 Х-сигнал рассогласования регулятора; X - сигнал скорости изменения рассогласования регулятора; L0, Li. L0, Li - фазовые траектории на фазовой плоскости Х.Х.
Релейный регулятор работает следующим образом. Пусть на вход релейного регулятора 1 поступает сигнал X, а на вход 2 - сигнал X. Предполагается, что сигнал X увеличивается от нуля (X 0). При X h (h - уровень срабатывания и отпускания второго релейного элемента 4) выходные сигналы первого 3 и второго 4 релейных элементов соответственно равны RI 0 и Ra О (О обозначает низкий уровень выходного напряжения). Предполагается также, что в начальный момент времени X I (I - уровень срабатывания четвертого релейного элемента б,уровень отпускания которого равен нулю). Выходные сигналы третьего 5 и четвертого б релейных элементов соответст- jjeHHO равны: R з 0 (Ra 1) и Пд 1 (R4 0); Ra и - инверсные выходные сигналы этих
релейных элементов (1 обозначает высо кий уровень выходного напряжения).
При X h выходные сигналы будут равны: Pi 0 (Pi - выходной сигнал первого
элемента И 7), Р2 0 (Ра 1); Ра и Ра соответственно прямой и инверсный выходы второго элемента И 8, Ti 0 (Ti 1), Ti и Ti - соответственно прямой и инверсный выходы первого триггера 22; Ki О, Ki выходной сигнал первого ключа 18 равен нулю, так как этот ключ закрыт сигналом Ti О, RS 1, RS - выходной сигнал пятого релейного элемента 20; RS 1, так как Ki д, д- уровень срабатывания и отпускания
пятого релейного элемента 20, (Рг. RS 1), Рз - выходной сигнал третьего элемента И 9 удерживает первый триггер 22 в нулевом состоянии, РА О (F« 1), Р и РА - соответственно прямой и инверсный выходы четвертого элемента И 10, Та 0 (Та 1), Та и Т2 - прямой и инверсный выходы второго триггера 13, К2 О, К2 - выходной сигнал второго ключа 19 равен нулю, так как этот ключ закрыт, сигналом Та 0, Re 1, Re выходной сигнал шестого релейного элемента 21, Re т 1. так как Ка -д. - д - уровень срабатывания и отпускания шестого релейного элемента 21, PS О (Р 1, Re 1), PS - выходной сигнал пятого элемента
И 11, Ре 0 (Ti 1. Ra 0), Ре - выходной Јигнал шестого элемента И 12, Ру 1 (R4 1. Та 1), Ру - выходной сигнал седьмого элемента И 13, U+ 0 (Re 0, Та 0). U+ - выходной сигнал первого элемента ИЛИ 24
(выходной положительный сигнал регулятора 26), U- 1 (Р 1, Ti 0), U-- выходной сигнал второго элемента ИЛИ 25 (выходной отрицательный сигнал регулятора 27). При X h срабатывает второй релейный
элемент 4 и его выходной сигнал R2 1. Состояние остальных схем и сигналов не изменяется.
Пусть в некоторый момент времени to сигнал X 0 (отпускает четвертый релейный
элемент 6 и его выходной сигнал RA О (R4 1). В этот момент времени RI 0, Ra 1, R3 0 (Ra 1). R/I - О (R4 1). Pi 1. Ра - 1 (Р2 - 0), Рз - 0, Ti - 1 (Тi 0). Р5 О, Р7 О, U- 1. U+ 0. Сигнал Ра 1 устанавливает
первый триггер 22 в состояние 1, а Ра О снимает обнуление этого триггера (Рз 0). Сигнал Ti 1 открывает первый ключ 18. и его выходной сигнал Ki Si, Si - выходной сигнал первого сумматора 16, причем
Si-X+h.(1)
где h - выходной сигнал первого интегратора 14. Сигнал Ti О снимает обнуление первого интегратора 14, и его выходной сигнал h равен
li / Xdt.(2).
to
Пусть в момент времени to X Xi. Тогда в этот момент времени Ki Xi д, отпускает пятый релейный элемент 20 (Rs 0). Даль- нейшее изменение сигнала X можно
записать в виде
t
X Xi + / Xdt Xi + li.(3)
. -to
Подставляя (З) в (1), получают Si Xi + 2li.(4)
С момента времени to изменяется знак сигнала X (X 0). Пятый релейный элемент 20 сработает при условии
Ki Si 3.(5)
С учетом (4) для этого момента времени (например, ti) имеют
iXi d,„
li 2
Выбирая д малой величины, из (6) получают
, Х1 1,-7т
Пусть при t ti X - Х2, тогда из (3) и (7) имеют
Х2-,И.(8)
В момент времени ti RI - 0, R2 1. Rs 1 ( 0, считая, что к этому моменту времени сигнал X стал меньше значения -I, где -I - уровень срабатывания третьего релейного элемента 5, уровень отпускания которого равен нулю), R4 0 ( 1), RS 1, Pi 0, Р2 О, Р2 1, Рз - 1 (устанавливает первый триггер 22 в состояние О), Ti 0,Ti 1, U+ 1, U- 0. В этом состоянии схема будет находиться до тех пор, пока сигнал X не станет равным нулю (пусть это произойдет в момент времени t2).Если в момент времени t2 IXI h (что будет показано ниже на примере управления динамическим объектом), то для этого времени RI О, R2 0, Рз О, RA О (RA 1), Р2 О (Р2 1) Рз 1. Rs 1, Re 1,Р4 О (РА - 1), PS - 1, Ti - О (fi 1), Т2 О (Т2 1), Рб О, Р О, U-t- О, U- 0, т.е. при IXI h и X 0 выходные сигналы релейного регулятора U+ и U- равны нулю.
Аналогично схема работает и при уменьшении X от нуля (X 0). В этом случае при X -I срабатывает третий релейный элемент, его выходные сигналы равны: R з 1, Рз 0. Так как Ti 1, то Ре 1 и U+ 1 (формируется положительный сигнал регулятора). При X -h срабатывает первый релейный элемент 3, его выходной сигнал RI 1, При дальнейшем изменении сигнала X при X О (отпускает третий релейный элемент) RS О, RS 1. В этот момент време
10
15
20
25
ни Р-5 - 1, PI 0. Pfi - 0 (снимает обнуление второго триггера 23). Сигнал РА 1 устанавливает второй триггер 23 в состояние 1, при этом Т2 1, Т2 0. Сигнал Т2 О снимает обнуление второго интегратора 15. а сигнал Т2 1 открывает второй ключ 19, и его выходной сигнал К2 Sj. причем
S2 X + I2,(9)
где S2 - выходной сигнал второго сумматора 17; |2 - выходной сигнал второго интегратора 15.
Сигнал 12 равен t .
12- / Xdt,(10)
, 6 где to - момент времени, когда X 0. Пусть
в этот момент X -Xi, тогда К/ -Х2 - д. При этом отпускает шестой релейный элемент 2 1 (Re 0). Изменение сигнала X можно записать в виде t
X Xi+ JT Xdt Xi + 12.(11)
Io
Из (9), (10), (11) имеют
S2 -Xi + 2l2. ((12)
В момент времени t i, когда S2 - д (Re 1), имеют
0
5
0
5
0
5
i - Xl
12- T
(13)
(14)
Пусть при t tV X -X2, тогда
v, I,- X1 X2- 2 .12- -y.
В момент времени t i Ri 1, R2 0. РЗ - 0, R3 1, R4 1,4 0, Re 1, Pi 0. P 0, PA 1, Ps 1 (устанавливает второй триггер 23 в состояние О), Т2 0, Т2 1, 1- U- 1 (считают, что в момент времени t i X I и четвертый релейный элемент б включен). В этом состоянии схема будет находиться до тех пор, пока сигнал X не станет равным нулю (пусть это момент времени t 2). Ниже будет показано, что в момент времени t2 IXI h, U- 0, U+ 0.
Таким образом, предлагаемый релейный регулятор формирует демпфирующий релейный управляющий сигнал на снижение скорости изменения рассогласования (интервалы времени 0, to и ti, t2J и форсирующий релейный управляющий сигнал на уменьшение абсолютного значения сигнала рассогласования и увеличение скорости изменения рассогласования (интервал времени ,). Вспомогательный сигнал И (12) формируется на интервале to, ti, при этом в конце интервала ti IXI Mil.
Процесс управления на фазовой плоскости X, X может быть рассмотрен на примере управления инерционным объектом
второго порядка с передаточной функцией Wo(p) 1/р2. Уравнение движения объекта имеет вид
X U.(15)
где U принимает значение Е (Е - значение управляющего воздействия на объект управления при U+ 1. -Е при U 1 и при U+ О, U- 0).
Изменение координат X и X от времени записывается в виде
X Xo + Ut,(16)
X Х0 + X0t +
Uf
(17)
где Х0 и Хо - координаты объекта управления при t 0.
Фазовые траектории изображающей точки имеют вид
X Xo(U 0),(18)
X2 - Хо2 ±2 Е(Х - Х0) (U ± Е). (19) Считают переходный процесс закончившимся, если изображающая точка попадает в область, ограниченную прямыми X ±h, X ±l (область А, фиг. 2). Пусть начальное положение точки М определено координатами (О, Х0). В соответствии с рассмотренной логикой работы релейного регулятора в точке М формируется сигнал U- 1 (U -Е) и изображающая точка будет двигаться по траектории L0 (19). В точке Mi (X XL X 0) начинается формирование форсирующего релейного управляющего сигнала на уменьшение абсолютного значения координаты X (U -Е) и вспомогательного сигнала li. В точке Мз, для которой X -Н, вырабатывается сигнал U+ 1 (U Е) и изображающая точка движется по траектории Li (19) к началу координат (в область А).
Можно показать, что рассмотренный процесс управления приводит изображающую точку в начало координат (область А). Из (19) координата точки Mi
9
Хо2
«-Ј
Xi
2 Е
а координаты точки М2 (Х2, Ya) равны
t
,Y2 --.(21)
С учетом (21) уравнение траектории U согласно (19) имеет вид
Ј Ј
K2-()-2E() (22)
Процесс управления заканчивается при X 0 (U+ 0, IL 0). Как следует из (22). для этого момента времени X 0, т.е. изображающая точка приходит в начало координат.
Рассмотренный процесс является более быстродействующим при заданном значении Е. В общем случае время движениями изображающей точки М из положения (О, Х0) в положение (0,0) можно представить в виде
tm tl + t2 + 13,(23)
где ti - время движения на участке торможения М - Mi; t2 - время движения на участке разгона Mi - N2; ta - время движения
5 на участке торможения М2 - 0. Известно, что минимальное время движения из очки Mi в очку 0 при максимально возможном ускорении Е и конечной скорости X 0 определяется таким движением, при котором
10 первая половина пути проходит с ускорением Е, а вторая с замедлением -Е, т.е.
(24)
Минимальное значение ti (а следова- 15 тельно, и Xi) при заданном значении Е определяется равенством
(25)
т.е. при движении с замедлением -Е.
Таким образом, минимальное время движения tm изображающей точки М из положения (0, Хо) в начало координат при заданном Е определяется равенством
tm (1+v5).(26)
Именно такое время длится переходный процесс рассматриваемой динамической системы, т.е. способ формирования трехуровневого релейного управляющего сигнала и релейный регулятор обеспечивают минимальное время переход но го процесса, а значит, сокращается время переходного процесса.
Под перерегулированием Р рассматриваемой динамической системы понимают отношение максимального значения рассогласования одного знака Хт2 к предшествующему ему в процессе управления максимальному значению регулируемого рассогласования другого знака Хт1. Как следует из рассмотренных фазовых траекторий, изображающая точка в процессе (20)управления находится либо в правой (точка
М). либо в левой (точка N) полуплоскости,
45 Следовательно, для любой траектории Xm2 ™ 0, а значит и перерегулирование Р 0. Формула изобретения 1. Способ формирования трехуровневого управляющего сигнала в релейных систе50 мах управления динамическим объектом, включающий измерение сигналов рассогласования и скорости изменения рассогласования и при превышении этими сигналами зоны нечувствительности формирование
55 релейного управляющего сигнала, знак которого противоположен знаку скорости изменения рассогласования, отличающийся тем, что. с целью сокращения времени переходного процесса и исключе20
25
30
35
40
«-Ј
Минимал ьно, и Xi) еляется р
ния перерегулирования, с момента изменения знака скорости рассогласования формируют совпадающий с ним по знаку форсирующий релейный управляющий сигнал, в течение действия которого прерыва- ют формирование демпфирующего релейного управляющего сигнала и образуют вспомогательный сигнал путем интегрированияскоростиизменениярассогласования, при этом формирование форсирующего релейного управляющего сигнала заканчивают в момент равенства абсолютных значений сигнала рассогласования и вспомогательного сигнала, а трехуровневый управляющий сигнал образуют в виде суммы форсирующего и демпфирующего сигналов.
вертого элемента И. выход второго релейного элемента - с первым входом второго элемента И. прямой выход третьего релейного элемента соединен с первым входом шестого элемента И. прямой выход четвертого релейного элемента - с первым входом седьмого элемента И, инверсные выходы третьего и четвертого релейных элементов - соответственно с первым и вторым входами первого элемента И. выход которого соединен с вторыми входами второго и четвертого элементов И, прямые выходы которых соединены соответственно с входом установки в 1 первого и второго триггеров, а инверсные выходы этих элементов соединены соответственно с первыми входами третьего и пятого элементов И, вторые входы которых соединены соответственно с вы- ходами пятого и шестого релейных элементов, соединенных входами соответственно с выходами первого и второго ключей, сигнальные входы которых соединены соответственно с выходами первого и второго сумматоров, управляющий вход первого ключа соединен с прямым выходом первого триггера и первым входом второго элемента ИЛИ, управляющий вход второго ключа - с прямым выходом второго триггера и первым входом первого элемента ИЛИ, второй вход которого соединен с выходом шестого элемента И, соединенного вторым входом с инверсным выходом первого триггера и входом установки в 0 первого интег- ратора, выход третьего элемента И соединен с входом установки в О первого триггера, выход пятого элемента И - с входом установки в О второго триггера, инверсный выход которого соединен с входом установки в О второго интегратора и вторым входом седьмого элемента И, соединенного выходом с вторым входом второго элемента ИЛИ, выход которого соединен с выходом отрицательного сигнала регулятора, а выход первого элемента ИЛИ - с выходом положительного сигнала регулятора.
fa(KM
.2.
| Релейно-импульсный регулятор | 1984 |
|
SU1280567A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Способ управления | 1975 |
|
SU805247A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
