NNN
Фиг.1
317
Изобретение относится к подъемно- транспортному оборудованию и может быть использовано в устройствах кабельного подвода электроэнергии к подвижному приемнику.
Известен канатосборочный механизм, состоящий из электродвигателя, цепной передачи, барабана и стояночного тормоза, взаимодействующего с барабаном.
Недостатками данного механизма являются низкая надежность и высокая металлоемкост ь.
Известен кабельный барабан с электроприводом, содержащий электродвигатель , пускорегулирующее устройство и кабельный барабан с планетарным редуктором, зубчатый венец которого неподвижно закреплен на барабане, а на оси последнего закреплены с возможностью вращения солнечное колесо и водило с сателлитом, причем водило соединено посредством тяги с пускоре- гулирующим устройством.
Недостатки данного технического решения - низкая надежность и большая металлоемкость.
Целью изобретения является повышение надежности устройства и снижение его металлоемкости.
Указанная цель достигается тем, что в устройство гибкого токоподво- да подвижного приемника, состоящее из электродвигателя, кабельного барабана со встроенным планетарным редуктором, солнечное колесо которого расположено по оси барабана, имеющего жестко закрепленный зубчатый венец, с которым находится в зацеплении по меньшей мере один сателлит, установленный с возможностью вращения на водиле, связанном с механизмом регулирования момента на валу электродвигателя, снабжено средствами, обеспечивающими возможность опережающего включения электродвигателя барабана по отношению к двигателю приемника, механизм регулирования выполнен с возможностью обеспечения ограничения момента на валу электродвигателя, причем с валом последнего жестко связано солнечное колесо, а водило жестко соединено с механизмом регулирования.
Кроме того, для облегчения условий запуска электродвигателя кабельного барабана механизм регулирования момента на валу последнего выполнен в виде электромагнитного порошкового тормоза.
0
5
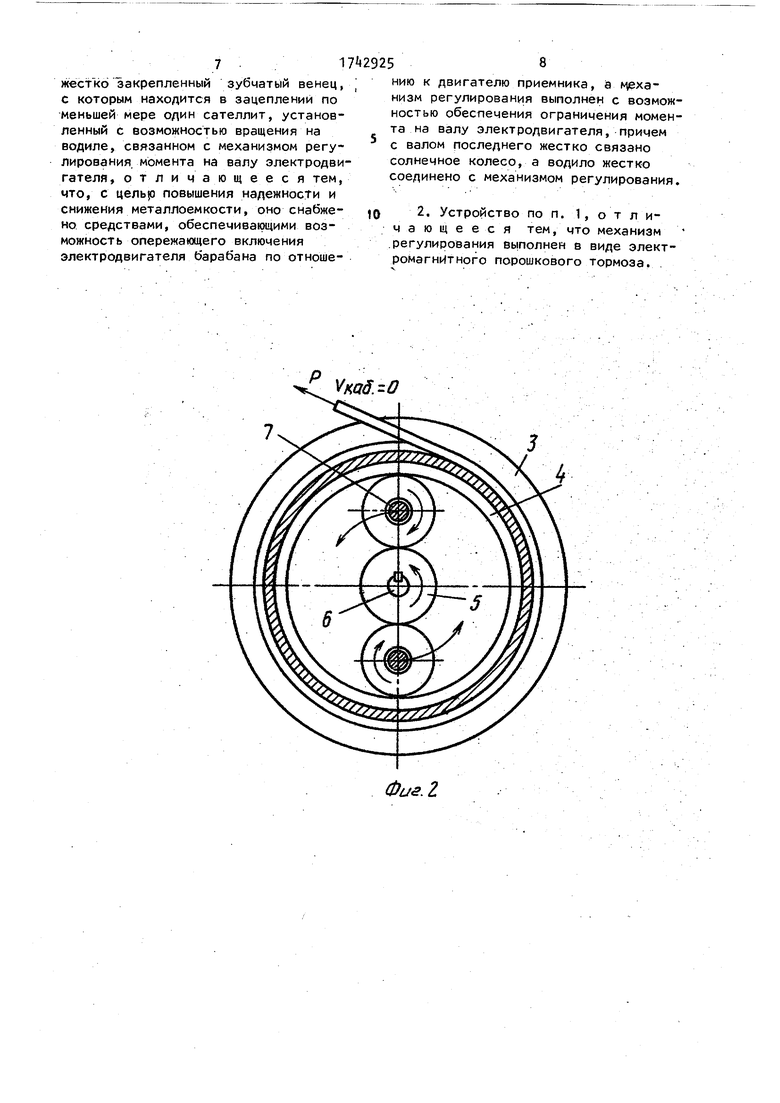
На фиг. 1 изображена кинематическая схема устройства гибкого токоподвода подвижного приемника; на фиг. 2 - вид на встроенный планетарный зубчатый редуктор со стороны механизма регулирования при работающем электродвигателе и застопоренном барабане; на фиг. 3 - то же, при работающем электродвигателе и барабане вращающимся под действием сматываемого с него кабеля; на фиг. k - то же, при работающем электродвигателе и барабане, вращающемся под действием послед- . него в сторону намотки кабеля; на
0
фиг. 5 - принципиальная электрическая схема устройства для обеспечения опережающего включения электродвигателя барабана.
Устройство гибкого токоподвода подвижного приемника состоит из электродвигателя 1, стояночного тормоза 2 (например, типа ТКТ) и кабельного барабана 3. Внутрь последнего встроен планетарный зубчатый редуктор. Его зубчатый венец b неподвижно закреплен на обечайке барабана 3, а солнечное колесо 5 неподвижно установлено на промежуточном валу 6. Сателлиты на водиле 7 находятся во внешнем зацеплении с солнечным колесом 5 и во внутреннем зацеплении с зубчатым венцом А. Причем водило 7 жестко связано с механизмом 8 регулирования момента (например, электромагнитным по5 рошковым тормозом серии ПТ). Промежуточный вал 6 установлен в подшипниковой обойме 9, на которой посредством опорных подшипников 10 закреплен кабельный барабан 3. Кроме того, промежуточный вал 6 жестко связан с электродвигателем I, а тормоз 2 имеет возможность контактировать со шкивом 11, жестко закрепленным на барабане 3. При этом технические данные
5 механизма 8 регулирования момента и Электродвигателя 1 выбирают по справочникам, чтобы момент электромагнитного порошкового тормоза, приведенный к барабану 3, был достаточен для
0 создания необходимого усилия натяжения кабеля и он же (момент тормоза), приведенный к валу электродвигателя, не превышал по величине минимального пускового момента электродвигателя 1.
5 Электродвигатель кабельного барабана 1 и электродвигатель механизма пере- движения токоприемника 12 связаны посредством устройства, обеспечиваю0
щего опережающее включение первого электродвигателя по отношению к второму. Последнее состоит, например, из путевого выключателя 13, последовательно к которому подключено электрическое реле 14 с двумя замыкающими контактами, один из которых задействован в цепи управления электродвигателем 1 кабельного барабана, а другой - в цепи управления реле 15 времени, причем замыкающий контакт последнего задействован в цепи управления электродвигателем механизма передвижения токоприемника 12.
Устройство работает следующим образом.
Для трогания с места токоприемника (например, электропогрузчика) в любую сторону от места закрепления кабеля сначала посредством замыкания контакта путевого выключателя 13 (устанавливаемого возле педали газа) запитывается реле 14, которое своими замыкающими контактами подключает к источнику электроэнергии электродвигатель кабельного барабана 1 и реле 15 времени. Причем одновременно с подключением двигателя 1 включается и обмотка возбуждения электромагнитного порошкового тормоза. Реле 15 времени через определенный промежуток времени подключает своим замыкающим контактом электродвигатель механизма передвижения токоприемника 12, одновременно с которым включается электромагнит стояночного тормоза 2.
Таким обр азом, в начальный момент электродвигатель 1 кабельного барабана начинает вращать солнечное колесо 5 и находящиеся с ним во внешнем зацеплении сателлиты при застопоренном барабане 3. Поэтому последние (сателлиты), находясь также во внутреннем зацеплении с зубчатым венцом 4, начинают перекатываться по нему, приводя во вращение водило 7, нагруженное тормозным моментом посредством электромагнитного порошкового тормоза 8, Двигатель 1 вращает ротор электромагнитного порошкового тормоза О, на котором создан момент, обеспечивающий требуемое усилие натяжения кабеля Р, но при этом соблюдается условие, что приведенный момент, создаваемый этим тормозом на валу электродвигателя 1, не превышает минимального пускового момента электродвига- .
10
15
.
742925
теля, что необходимо для гарантированного разгона последнего. В следующий момент, когда включаются электромагнит стояночного тормоза 2 и электродвигатель механизма передвижения to- коприемника, и последний двигается в направлении от места закрепления кабеля, барабан 3 начинает вращаться против часовой стрелки, преодолевая момент сопротивления, создаваемый электромагнитным порошковым тормозом 8, вследствие -принудительного сматывания кабеля. Находящиеся с зубчатым венцом 4 во внутреннем зацеплении сателлиты, вращаемые солнечным колесом 5 от электродвигателя 1, перекатываются по нему против часовой стрелки, а также увлекаются одновременно
20 в том же направлении вращающимся барабаном 3. За счет последнего частота вращения водила 7 увеличится, но усилие натяжения Р остается прежним, так как тормозной момент, создаваемый
25 электромагнитным порошковым тормозом 8 от частоты вращения ротора, жестко связанного с водилом 7, не зависит. Если же токоприемник движется к месту закрепления кабеля, то бараЗд бан 3 будет вращаться по часовой
стрелке вследствие вращения его в эту сторону сателлитами, вращаемыми солнечным колесом 5 от электродвигателя 1, При этом сателлиты будут перекатываться по зубчатому венцу 4, т.е. дут стремиться поворачивать водило против часовой стрелки, но частота вращения его будет меньше, чем в случае с застопоренным барабаном, так как сателлиты увлекаются зубчатым
во вращение против часовой
40
венцом 4 стрелки.
При остановке подвижного объекта сначала отключается электродвигатель механизма передвижения токоприемника
45 12, а затем электродвигатель кабельного барабана 1, электромагнит стояночного тормоза 2 и обмотка возбуждения электромагнитного порошкового тормоза 8.
50
Формула изобретения
1. Устройство гибкого токоподво- да подвижного приемника, содержащее 55 электродвигатель, кабельный барабан со встроенным планетарным редуктором, солнечное колесо которого расположено по оси барабана, имеющего
71
жестко Закрепленный зубчатый венец, с которым находится в зацеплении по меньшей мере один сателлит, установленный с возможностью вращения на водиле, связанном с механизмом регулирования момента на валу электродви гателя, отличающееся тем, что, с цельр повышения надежности и снижения металлоемкости, оно снабжено средствами, обеспечивающими возможность опережающего включения электродвигателя барабана по отноше 29258
нию к двигателю приемника, а механизм регулирования выполнен с возможностью обеспечения ограничения момента на валу электродвигателя, причем с валом последнего жестко связано солнечное колесо, а водило жестко соединено с механизмом регулирования.
Ю 2. Устройство по п. отличающееся тем, что механизм регулирования выполнен в виде электромагнитного порошкового тормоза.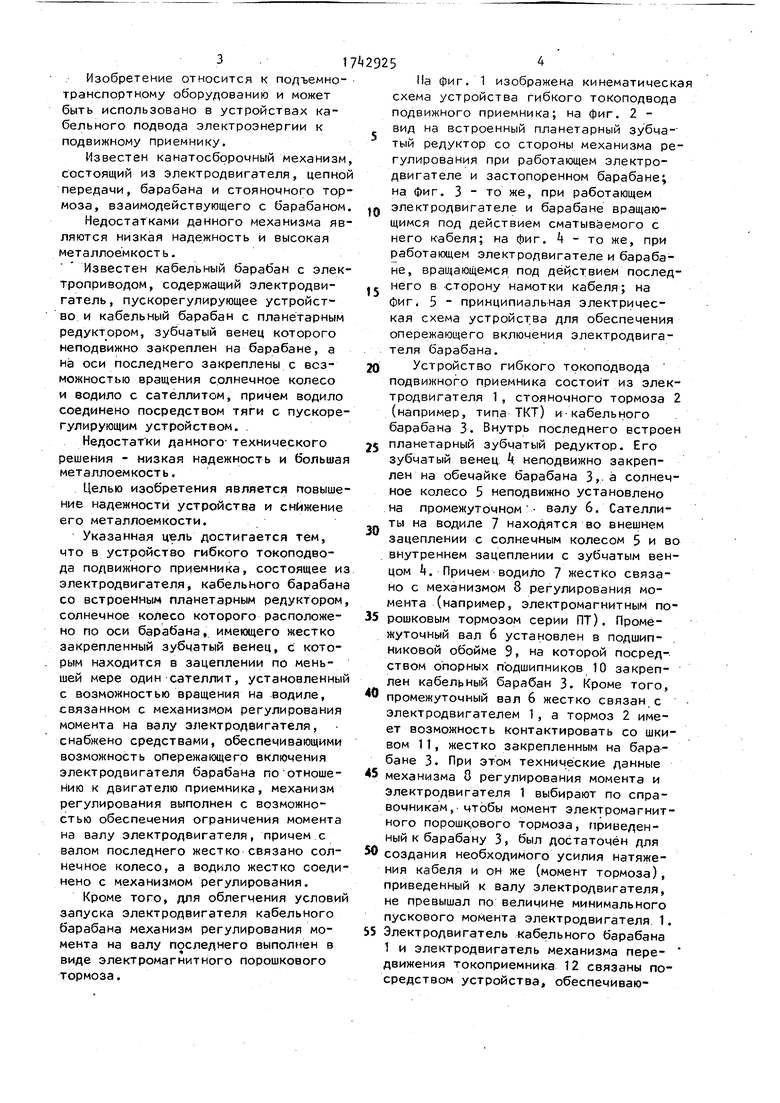

| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПОДАЧИ ГОРНОЙ МАШИНЫ | 1995 |
|
RU2105149C1 |
| Таль | 1988 |
|
SU1768501A1 |
| ЭЛЕКТРИЧЕСКАЯ ТАЛЬ | 1973 |
|
SU391992A1 |
| ВЕДУЩИЙ УПРАВЛЯЕМЫЙ МОСТ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2468936C2 |
| Манипулятор | 1983 |
|
SU1094734A1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2659163C2 |
| ЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1968 |
|
SU209178A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА СКВАЖИННЫХ ПРИБОРОВ | 2001 |
|
RU2179635C1 |
| ГИДРОМЕХАНИЧЕСКИЙ ГРЕЙФЕР | 1999 |
|
RU2165386C2 |
| Приводная станция эскалатора | 1988 |
|
SU1557048A1 |



Vmd.-O
Фиг. 2
Фиг, 5
