Изобретение относится к транспортному машиностроению и может быть использовано в гидроприводах транспортно-погрузочных средств, в частности, в тягачах с гидрообъемным приводом хода и гидрофицированным навесным оборудованием.
Цель изобретения - повышение экономичности путем снижения потерь рабочей жидкости.
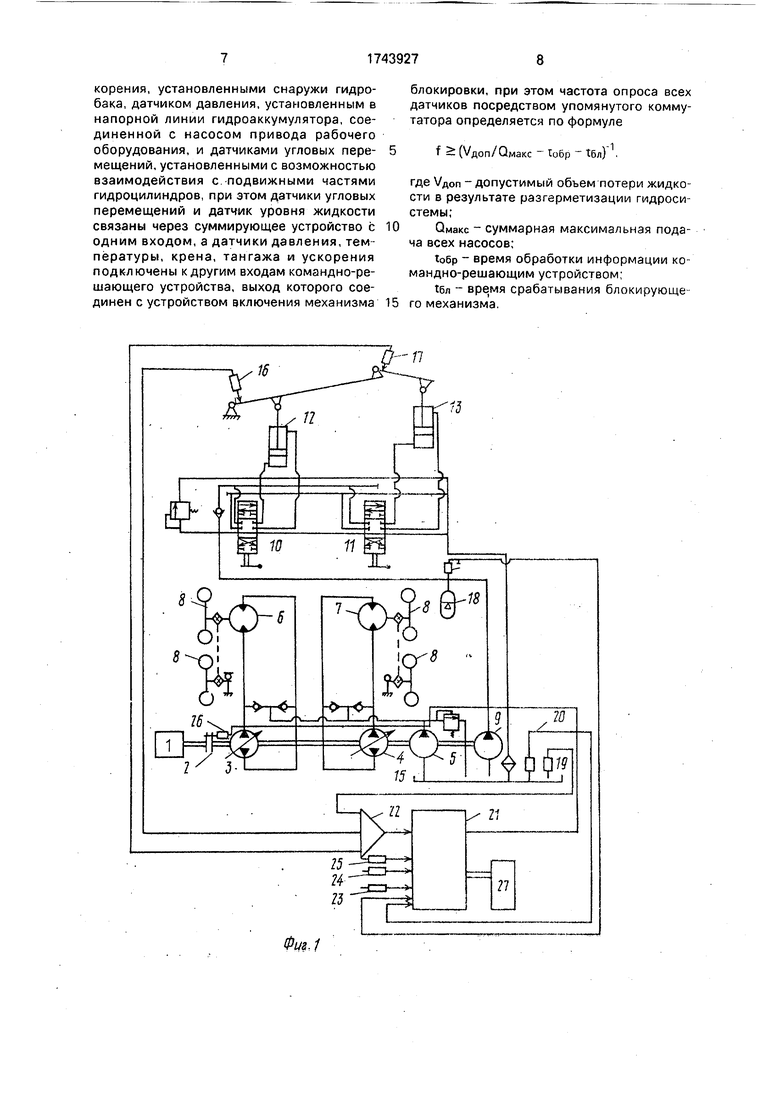
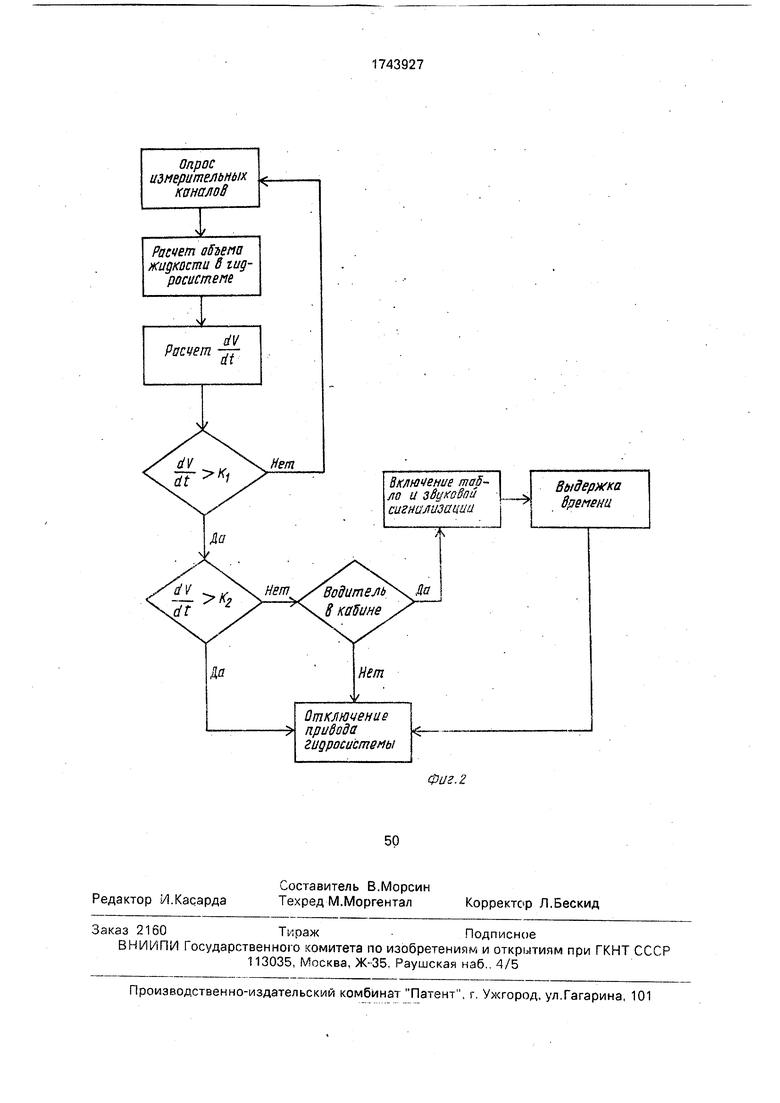
На фиг. 1 приведена схема силовой передачи транспортного средства; на фиг. 2 - алгоритм управления механизмом блокировки.
Силовая передача транспортного средства содержит приводной двигатель 1 внутреннего сгорания, муфту 2 сцепления, гидрообъемную передачу, включающую регулируемые насосы 3 и 4 привода хода, под- питочный насос 5 и гидродвигатели 6 и 7 привода хода, валы которых кинематически связаны с движителями 8 машины и гидропривод рабочего оборудования, включающий нерегулируемый насос 9 и трехпозиционные трехлинейные гидрораспределители 10 и 11, посредством которых насос 9 сообщен с гицроцилиндрами 12 и 13 привода рабочего оборудования. В напорной линии насоса 9 установлен гидроаккуХ|
4
СО
ю
ю
X
мулятор 14, сливная линия сообщена с гидробаком 15.
В шарнирах элементов рабочего оборудования установлены датчики 16 и 17 углового перемещения, выполненные, например, из вращающихся трансформаторов или сельсин-датчиков. Угловому перемещению каждого элемента навесного оборудования соответствует определенное линейное перемещение гидроцилиндров 12 и 13. Давление зарядки гидроаккумулятора 14 контролируется потенциометрическим датчиком 18 давления, установленным в гидролинии высокого давления. В гидробаке 15 установлены емкостный датчик 19 уровня жидкости и датчик 20 температуры, выполненный, например, на базе терморезистора. Выходные сигналы от указанных датчиков подаются на командно-решающее устройство 21, причем от датчиков 16, 17 и 19 через суммирующий блок 22. Гидросистема дополнительно снабжена датчиками крена 23 машиньшаклона в поперечной плоскости и датчиком тангажа 24 машины (наклона в продольной плоскости), а также датчиком 25 ускорения машины (разгона и торможения), которые устанавливаются на корпусе гидробака и позволяют скорректировать отклонения от заданного уровня жидкости в гидробаке при наклонах ма- шины, ее разгоне и торможении. В кабине оператора может быть установлен с возможностью взаимодействия с сиденьем оператора конечный включатель (не показан), сигнализирующий о нахождении one- ратора на рабочем месте.
Выход командно-решающего устройства 21 соединен с механизмом 26 блокировки, взаимодействующим с муфтой 2 сцепления. Командно-решающее устройст- во 21 снабжено коммутатором 27 опроса датчиков. Частота опроса датчиков коммутатором 27 определяется из выражения
-1
f (/доп/Омакс to6p t6fl) .
где VAon - допустимый объем потери жидкости в результате разгерметизации гидросистемы;
Омакс суммарная максимальная пода- ча всех насосов;
Тобр - время обработки информации командно-решающим устройством;
Тбл - время срабатывания- механизма блокировки,
Силовая передача транспортного средства работает следующим образом,
Двигатель 1 через заблокированную муфту 2 сцепления приводит насосы 3, 4, 5 и 9. От регулируемых насосов 5 и 4 жидкость
5 0 5 0 5 0 5
0
5
0
5
поступает на гидродвигатели 6 и 7 привода движителей 8. Регулированием рабочего объема насосов 3 и 4 достигается изменение скорости и направления движения машины. Насос 5 осуществляет подпитку замкнутого гидравлического контура. При этом перетечки рабочей жидкости в насосах и излишки в линии подпитки сливаются в гидробак 15. Одновременно от нерегулируемого насоса 9 рабочая жидкость подводится к распределителям 10 и 11, В нейтральной позиции распределителей 10 и 11 рабочая жидкость поступает через них в гидробак 15. В рабочих позициях распределителей 10 и 11 рабочая жидкость подается н-а зарядку гидроаккумулятора 14, в гидроцилиндры 12 и 13 и далее сливается в гидробак 15. При этом в общем случае за счет разности объемов поршневых и штоковых полостей гидроцилиндров, объема жидкости, заполняющей гидроаккумулятор, температурного расширения жидкости за счет колебаний машины при ее движении уровень жидкости в гидробаке будет изменяться. Одновременно с запуском двигателя вступает в работу командно-решающее устройство 21. Опросив датчики при помощи коммутатора 27 и обработав информацию, устройство 21 рассматривает суммарный объем жидкости в гидроприводе в первоначальный момент времени и запоминает полученное значение.
Суммарный объем жидкости /Сум складывается из объема жидкости в гидробаке V6, объема жидкости в гидроаккумуляторе V3K при данном давлении и объема жидкости, заполняющей гидроцилиндры УГц. При этом необходимо учитывать изменение суммарного объема в результате температурной деформации жидкости.
Суммарный объем жидкости является величиной постоянной и принимаем в качестве контрольного параметра. При наружной утечке жидкости величина суммарного объема уменьшается.
Объемы жидкости, заполняющие гидродвигатели, вспомогательную и контрольную гидроаппаратуру и соединения в отличие от /казанных ранее объемов в процессе работы гидроприводе, остаются постоянными (если пренебречь сжимаемостью жидкости) и так как они не влияют на текущее значение контролируемого суммарного объема, то при расчете не учитываются.
Таким образом, величину суммарного объема жидкости в гидроприводе можно представить в виде
V (Уб + Уак + Т Y/,rL,) :onst, (1)
где а - коэффициент, учитывающий температурную деформацию жидкости.
а 1 + а ДТ
где ДТ - разность температур,
а - коэффициент температурной деформации жидкости.
Объем гидробака
V6 Рб h,
где Рб - площадь сечения гидробака;
h - высота уровня жидкости в гидробаке.
Объем жидкости в гидроаккумуляторе
dV
Если же -- KI, го это значение сравнива- dt
ется с постоянной К2, являющейся выбранным пороговым значением, харак5 теризующим герметичность гидропривода. При этом, если полученный результат меньше К2, что соответствует отказу, когда защиту (блокировку) гидропривода может осуществить оператор машины, то звуковой
10 и световой сигналы об отказе подаются на информационное табло. Если же отказ произошел в отсутствие оператора в кабине машины, то через определенный промежуток времени устройство 21 подает сигнал
15 блокирующему механизму 26 на отключение насосов от двигателя 1; если
dV dt
Кг,

Изобретение относится к транспортному машиностроению, в частности к гидроприводам транспортно-погрузочных средств. Цель изобретения - повышение экономичности путем снижения потерь рабочей жидкости. Силовая передача состоит из приходного двигателя, гидрообъемного привода хода и гидропривода рабочего оборудования. С двигателем связана муфта сцепления. Гидрообъемный привод хода состоит из регулируемых насосов, подпиточ- ного насоса и гидродвигателей привода движителей. Гидропривод рабочего оборудования состоит из, нерегулируемого насоса, гидрораспределителей и гидроцилиндров. В напорной гидролинии насоса установлен гидроаккумулятор. В шарнирах элементов рабочего оборудования установлены датчики угловых перемещений. В напорной линии гидроаккумулятора установлен датчик давления. В гидробаке уста- новлены датчики уровня и датчик температуры жидкости. От датчиков угловых перемещений и датчика уровня сигналы подаются на суммирующий блок. Гидросистема также снабжена датчиком крена, датчиком тангажа и датчиком ускорения, установленными на корпусе гидробака. Командно-решающее устройство коммутатором связано с всеми датчиками и с устройством включения блокирующего механизма. 2 ил.
VaK VK - Vr VK Рн Ун Рк
где VK - конструктивный объем гидроаккумулятора;
Vr - объем газовой полости. Рн;
VH - давление и объем газа в предшествующий момент времени;
Рк - давление газа в текущий момент времени.
Объем жидкости в i-том гидроцилиндре
Vil-Ц - (Fin + FIUIT) | + Г|ШТ llX,
где Fin и Р|шт - эффективные площади поперечного сечения поршней и штоковой полостей i-того гидроцилиндра;
х - величина хода i-того гидроцилиндра;
h - текущее значение величины хода i-того гидроцилиндра.
После опроса измерительных каналов коммутатором 27 в первоначальный момент включения гидропривода устройство 21 по выражениям (1-5) рассчитывает суммарный объем жидкости Усум.о и запоминает полученное значение. Далее через определенный интервал времени производится второй опрос измерительных каналов и вычисление значения VcyM 1. Затем производится вычисление приращения объема по времени (фиг. 2) и полученный расход сравнивается с заданной постоянной Кч, выбираемой с учетом функционирования гидропривода без ложных срабатываний механизма 26 блокировки в результате воздействия кратковременных случайных сигналов. Если расход, рассчитанный устройством 21 равен нулю, меньше или равен Кч, то герметичность гидропривода не нарушена и через определенный интервал времени происходит новый опроь датчиков.
то сигнал об отключении подается непосредственно на механизм 26. Частота опроса 20 датчиков выбирается из условия.
1 /f Удоп/Омакс Хобр - Хбл
где Удоп - допустимый объем потери жидко25 сти в результате разгерметизации гидросистемы;
Омакс - суммарная максимальная подача всех насосов;
to6p - время обработки информации,
30 Тбл - время срабатывания блокирующего механизма.
Таким образом, устройство позволяв г повысить экономичность транспортного средства.
35Формула изобретения
Силовая передача транспортного средства, содержащая приводной двигатель, муфту сцепления с механизмом блокировки и устройством его включения гидрообъем
40 ную передачу, включающую кинематически связанные с двигателем через муфту сцепления нерегулируемый насос привода рабочего оборудования, подпиточный насос и регулируемые насосы привода хода, гидрэг
45 лически соединенные с гидродвигателями привода хода, связанными с движителями, гидроцилиндры привода рабочего оборудований, лозиционныетрехлинейные распределители, гидро.жкумулятор, напорные
50 сливные гидролинии, предохранительные клапач.л и гидробак, отличающаяся тем, что, с целью повышения экономичности путем снижения готель рабочей жидкости, она снабжена командно-решающим устрой55 ством с шестью входами, выходом, коммутатором опроса дагчиюв, подключенным к командно-решающему устройству, суммирующим блоком, датчиками уровня и температуры жидкости, установленными внутри гидробака, датчиками крена, тангажа и ускорения, установленными снаружи гидробака, датчиком давления, установленным в напорной линии гидроаккумулятора, соединенной с насосом привода рабочего оборудования, и датчиками угловых перемещений, установленными с возможностью взаимодействия с подвижными частями гидроцилиндров, при этом датчики угловых перемещений и датчик уровня жидкости связаны через суммирующее устройство с одним входом, а датчики давления, тем пературы, крена, тангажа и ускорения подключены к другим входам командно-решающего устройства, выход которого соединен с устройством включения механизма
Фиг 1
0
5
блокировки, при этом частота опроса всех датчиков посредством упомянутого коммутатора определяется по формуле
f (Удоп/Омакс - to6p - Хбл) 1
где /Доп -допустимый объем потери жидкости в результате разгерметизации гидросистемы;
Омакс - суммарная максимальная подача всех насосов;
to6p - время обработки информации командно-решающим устройством
1бл время срабатывания блокирующе го механизма
-11
Опрос измерительных
каналоЙ
Расчет абъепв
жидкости 6 iugросистеме
Выдержка
бремени
| Силовая передача транспортного средства | 1984 |
|
SU1318440A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
