Изобретение относится к приборной промышленности и может быть использовано для измерения динамических характеристик гидродинамических полусферических опор скольжения гироскопов при моделирования заданных перегрузок в лабораторных условиях.
Известен способ измерения демпфирования опоры скольжения, заключающийся в том, что возбуждают свободные затухающие колебания опоры, измеряют амплитуды этих колебаний и по их соотношению определяют демпфирование опоры.
Известен стенд для осуществления указанного способа, содержащий смонтированные в корпусе приводной вал, механизм нагружения, измерители перемещений,
подшипники в виде газостатических опор и грузов, расположенных на валу, причем механизм нагружения выполнен поворотным.
Однако известные способ и стенд для его осуществления не позволяют измерять демпфирующие характеристики полусферической опоры при произвольном приложении в пространстве вектора амплитуды, а также другие динамические характеристики.
Известен также способ измерения зазора и давления несущего слоя смазки в подшипниках скольжения, заключающийся в том, что датчик давления и датчик зазора располагают в радиальном канале цапфы, задают ее вращение, снимают сигналы с датчиков и регистрируют распределение
2
О О ьь
чэ
давлений и зазоров в диаметральном сечении подшипника, в котором происходит вращение датчика.
Известно также устройство для измерения зазора и давления несущего слоя смазки в подшипниках скольжения, содержащее вал с осевым каналом и сопряженными с ним радиальными каналами подачи давления, датчики зазора и датчики давления, размещенные в этих каналах, токосъемники и регистрирующую аппаратуру.
Недостатками указанных способа и устройства являются невозможность определения пространственных распределений зазоров и давления, невозможность измерения демпфирующих и моментных характеристик опор, а также недостаточная точность измерений динамических характеристик из-за влияния силы тяжести ротора.
Цель изобретения - определение пространственного распределения динамических характеристик, расширение диапазона и повышение точности измерения этих характеристик при испытании полусферических гидродинамических опор скольжения.
Поставленная цель достигается тем, что при способе получения динамических характеристик опор скольжения, заключающемся в том, что создают независимо осевую и радиальную составляющие нагрузки на опору скольжения, разгружают ротор в поле силы тяжести от ее воздействия, изменяют величины осевой и радиальной составляющих нагрузки для изменения модуля и направления по полярному углу результирующего вектора нагрузки, измеряют для данного направления результирующего вектора распределение зазоров и давлений в меридиональном сечении опор, затем дискретно поворачивают по азимутальному углу неизменный по модулю и по полярному углу вектор нагрузки, измеряя для каждого дискретного значения азимутального угла распределение давлений и зазоров в соответствующем меридиональном сечении опоры, и после поворота результирующего вектора нагрузки по азимуту на 360° вновь изменяют осевую и радиальную составляющие нагрузки для изменения направления результирующего вектора нагрузки по полярному углу в пределах от 0 до 90°, поворачивают вектор нагрузки по азимуту и снова измеряют распределение дав- ления и зазоров в фиксированном меридиональном сечении при дискретных значениях азимутального угла и -с учетом измеренных значений давлений и зазоров при дискретных изменениях вектора нагрузки по полярному и азимутальному углам получают пространственные распределения этих характеристик для каждого значения модуля вектора нагрузки, для каждого дискретного направления по полярному углу пульсирующего вектора нагрузки постоянной амплитуды возбуждают колебания цапфы опоры, измеряют их амплитуды, затем определяют отношения амплитуд коле- бания цапфы опоры к постоянной амплитуде вектора пульсирующей нагрузки
и по уменьшению этого отношения судят о качестве демпфирования, затем варьируют сортами смазки и конструктивными параметрами опоры и по минимальному измене- нию этого отношения амплитуд при
изменении направления по полярному углу вектора пульсирующей нагрузки постоянной амплитуды устанавливают равномерное распределение демпфирования по всему пространству опоры.
В стенде для получения динамических
характеристик огюр скольжения, содержащем координатный стол с закрепленным на нем корпусом для установки в нем двух исследуемых опор, приводной ротор, механизмы радиального и осевого нагружения, газостатический подпятник, моментоизме- ритель, датчики давления и зазора, приводной ротор выполнен с полусферическими цапфами и снабжен якорем чэстоторегулируемого асинхронного электродвигателя, статором, установленным посредством двух подшипников качения в упомянутом корпусе с возможностью поворота вокруг ротора, а упомянутый механизм осевого нагружения выполнен гидравлическим с возможностью перемещения в направлении одной из исследуемых опор, при этом датчики давления установлены в другой исследуемой опоре в одном меридиональном сечении, а
датчики зазора - в другом меридиональном сечении этой опоры.
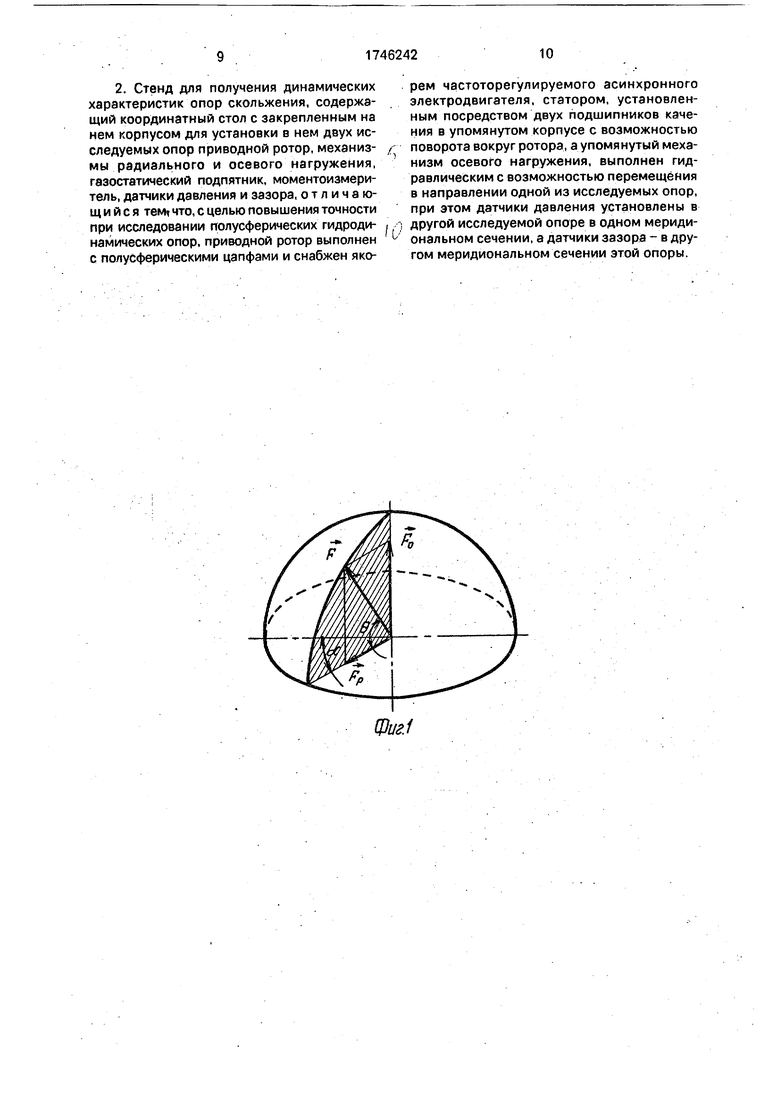
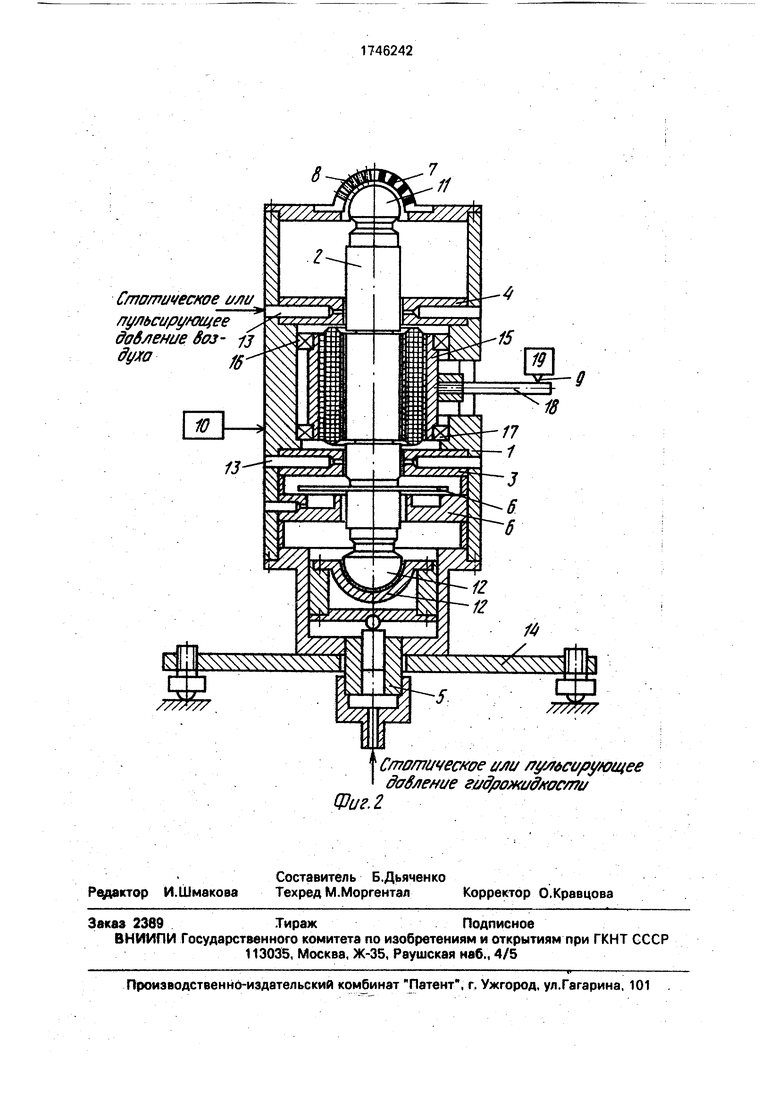
На фиг. 1 показана схема моделирования вектора перегрузки произвольного направления в пространстве; на фиг. 2 - стенд для реализации предлагаемого способа.
Для моделирования вектора перегрузки на опору произвольного направления задают вращение опоры, создают независимо
осевую FO и радиальную Fp составляющие нагрузки (фиг. 1), изменяя величины этих составляющих нагрузки, изменяютмодуль результирующего вектора нагрузки Ри устанавливают его направление по полярному
углу 0. Перекладывая затем дискретно неизменную по модулю радиальную составляющую нагрузки FЈ по азимутальному углу а, производят поворот результирующего вектора нагрузки F по азимуту.
. Стенд для реализации предлагаемого способа содержит смонтированный внутри корпуса 1 ротор 2 частоторегулируемого асинхронного двигателя, газостатические подшипники 3 и 4 для радиального газоста- тического нагружения, гидравлический механизм 5 для осевого нагружения, газостатический подпятник 6, датчики 7 давления, датчики 8 зазора и датчик 9 мо- ментоизмерителя.
Ротор 2 соединен с электроприводом 10 и подвешен на двух исследуемых опорах - верхней 11 и нижней 12. Нижняя опора 12 имеет возможность осевого перемещения,
В газостатических подшипниках 3 и 4 выполнены равномерно расположенные по окружностям сопла 13, Использование двух газостатических подшипников 3 и 4 радиального нагружения обеспечивает симметричность радиального нагружения исследуемых опор 11 и 12.
Газостатический подпятник 6 служит для вывешивания ротора 2 асинхронного двигателя с целью компенсации его силы тяжести, действующей на нижнюю опору 12.
Схема осевого нагружения опор 11 и 12, включающая гидравлический механизм 5 осевого нагружения и газостагический подпятник б для газостатической разгрузки по- движной нижней опоры 12, также симметрична - осевая нагрузка распределяется одинаково между исследуемыми опорами 11 и 12.
Для создания пульсирующей осевой на- грузки в гидравлический механизм 5 осевого нагружения подается пульсирующее давление гидрожидкости от гидравлического пульсатора, а для создания радиальной пульсирующей нагрузки в сопла 13 газоста- тических подшипников 3 и 4 подается пульсирующее давление сжатого воздуха.
В верхней неподвижной опоре 11 в одном ее меридиональном сечении расположены равномерно по полярному углу © локальные датчики 7 гидродинамического давления, в другом меридиональном сечении - датчики 8 зазора.
Для устранения прецессии и возможности появления нутации ротора 2 за счет мо- мента его силы тяжести, стенд закрепляется на координатном столе 14, с помощью которого вектор силы тяжести ротора ориентируется по оси его вращения.
Частоторегулируемый электропривод 10 служит для задания и измерения частоты вращения ротора 2 стенда.
Статор 15 асинхронного электродвигателя закреплен в корпусе 1 стенда на двух
шариковых подшипниках 16 и 17 и может вращаться вокруг ротора 2. Этим достигается измерение момента трения в исследуемых опорах 11 и 12 по реактивному моменту системы ротор 2 - статор 15 посредством стержня 18, закрепленного в статоре 15 и передающего усилие на датчик 8 моменто- измерителя 19,
Уменьшение погрешности измерения моментов трения исследуемых опор 11 и 12 с помощью газостатических подшипников 3 и 4 осуществляется с малыми погрешностями, поскольку моменты трения в газовом слое этих подшипников пренебрежимо малы по сравнению с измеряемыми моментами трения в исследуемых гидродинамических полусферических опорах.
Способ осуществляется следующим образом.
Электроприводом 10 задают необходимую частоту вращения ротора 2. Затем подачей сжатого воздуха в сопла 13 газостатических подшипников 3 и 4 создают радиальную гр, а гидравлическим механизмом 5 осевого нагружения - осевую составляющую нагрузки F0. Величины Јр и F0 задают такими, чтобы ориентировать результирующий вектор нагрузки F по некоторому полярному углу 01
После этого производят вывешивание ротора 2 в поле силы тяжести с помощью газостатического подпятника 6, т.е. компенсируют действие силы тяжести ротора 2, и с помощью датчиков 7 давления и датчиков 8 зазора измеряют распределение давлений и зазоров в меридиональном сечении опоры.
Датчики 7 давления и датчики 8 зазора расположены в получетверти меридионального сечения чашки неподвижной верхней опоры 11, и в силу симметрии системы при заданном векторе нагрузки получают одинаковые распределения динамических характеристик в обеих опорах.
Поскольку при предлагаемом способе производят вращение нагрузки по азимуту, для получения пространственных распределений динамических характеристик достаточно расположить указанные датчики только в одном меридиональном сечении опоры.
Затем, подавая сжатый воздух в сопла 13 поочередно, дискретно поворачивают неизменный по модулю вектор нагрузки по азимутальному углу а и для каждого дискретного значения этого угла измеряют распределение давлений и зазоров в
соответствующих меридиональных сечениях. После того, как результирующий вектор нагрузки повернется по азимуту на 360°, изменением радиальной и осевой составляющих нагрузки дискретно меняют направ- 5 ление результирующего вектора нагрузки по полярному углу (устанавливают угол (Эй), снова поворачивают результирующий вектор по азимуту и измеряют распределение характеристик в меридиональных сечениях, 10 соответствующих дискретным значениям азимутального угла а , и, поворачивая вектор нагрузки по полярному углу от 0 до 90°, получают пространственное распределение зазоров и давлений по полусфере опоры. 15
Для 1Цмерений демпфирующих характеристик опор в зависимости от направления вектора амплитуды нагрузки после ориентации результирующего вектора нагрузки по полярному углу 0 и азимутально- 20 му углу а в сопла 13 подают пульсирующее давление сжатого воздуха, а в гидравлический механизм 5 осевого нагружения - пульсирующее давление жидкости, возбуждая колебания в опорах, с помощью датчиков 7 25 зазора измеряют амплитуду колебаний цапфы опоры и по их соотношению определяют демпфирующие свойства исследуемых опор. Затем, варьируя сортами смазки и конструктивными параметрами опоры, по 30 минимальному изменению этого отношения амплитуд при изменении направления по полярному углу вектора пульсирующей нагрузки постоянной амплитуды устанавливают равномерное распределение демпфирова- 35 ния по всему пространству опоры.
Таким образом, предлагаемые способ и стенд для его осуществления за счет задания моделирующего перегрузку вектора на- грузки произвольного модуля и 40 направления в пространстве позволяют измерять пространственные распределения динамических характеристик опор скольжения, причем не только давлений и зазоров, но демпфирования и момента трения, в ус- 45 ловиях, максимально приближенных к эксплуатационным, при варьировании конструктивными и технологическими особенностями изготовления опор без исследований на натурных объектах, что снижает 50 финансовые и временные затраты на доводку изделий.
Кроме того, за счет газостатического выФормула изобретения 1. Способ получения динамических характеристик опор скольжения, заключающийся в том, что создают независимо осевую и радиальную составляющие нагрузки, на опору скольжения, отличающий- с я тем, что, с целью определения пространственного распределения динамических характеристик, расширения диапазона и повышения точности измерений этих характеристик при испытании полусферических гидродинамических опор скольжения, разгружают ротор в поле силы тяжести от ее воздействия, изменяют величину осевой и радиальной составляющих нагрузки для изменения модуля и направления по полярному углу результирующего вектора нагрузки, измеряют для данного направления результирующего вектора нагрузки распределение зазоров и давлений в меридиональном сечении опор, затем дискретно поворачивают по азимутальному углу неизменный по модулю и по полярному углу вектор нагрузки, измеряя для каждого дискретного значения азимутального угла распределение давлений и зазоров в соответствующем меридиональном сечении опоры, и после поворота результирующего вектора нагрузки по азимуту на 360° вновь изменяют осевую и радиальную составляющие нагрузки дли изменения направления результирующего вектора нагрузки по полярному углу в пределах от 0 до 90°, поворачивают вектор нагрузки по азимуту и снова измеряют распределение давления и зазоров в фиксированном меридиональном сечении при дискретных значениях азимутального угла и с учетом измеренных значений давлений и зазоров при дискретных изменениях вектора нагрузки по полярному и азимутальному углам получают пространственные распределения этих характеристик для каждого значения модуля вектора нагрузки, для каждого дискретного направления по полярному углу пульсирующего вектора нагрузки постоянной амплитуды возбуждают колебания цапфы опоры, измеряют их амплитуды, затем определяют отношения амплитуд колебания цапфы опоры к постоянной амплитуде вектора пульсирующей нагрузки и по уменьшению этого отношения судят о качестве демпфирования, затем варьируют сортами смазки и конструктивными параметрами опоры и по минимальному изменению этого отношения амплитуд при извешивания ротора в поле силы тяжести менении направления по полярному углу вышается точность измерений указанных вектора пульсирующей нагрузки постоянной амплитуды устанавливают равномерное распределение демпфирования по всему пространству опор,ы.
характеристик.
Формула изобретения 1. Способ получения динамических характеристик опор скольжения, заключающийся в том, что создают независимо осевую и радиальную составляющие нагрузки, на опору скольжения, отличающий- с я тем, что, с целью определения пространственного распределения динамических характеристик, расширения диапазона и повышения точности измерений этих характеристик при испытании полусферических гидродинамических опор скольжения, разгружают ротор в поле силы тяжести от ее воздействия, изменяют величину осевой и радиальной составляющих нагрузки для изменения модуля и направления по полярному углу результирующего вектора нагрузки, измеряют для данного направления результирующего вектора нагрузки распределение зазоров и давлений в меридиональном сечении опор, затем дискретно поворачивают по азимутальному углу неизменный по модулю и по полярному углу вектор нагрузки, измеряя для каждого дискретного значения азимутального угла распределение давлений и зазоров в соответствующем меридиональном сечении опоры, и после поворота результирующего вектора нагрузки по азимуту на 360° вновь изменяют осевую и радиальную составляющие нагрузки дли изменения направления результирующего вектора нагрузки по полярному углу в пределах от 0 до 90°, поворачивают вектор нагрузки по азимуту и снова измеряют распределение давления и зазоров в фиксированном меридиональном сечении при дискретных значениях азимутального угла и с учетом измеренных значений давлений и зазоров при дискретных изменениях вектора нагрузки по полярному и азимутальному углам получают пространственные распределения этих характеристик для каждого значения модуля вектора нагрузки, для каждого дискретного направления по полярному углу пульсирующего вектора нагрузки постоянной амплитуды возбуждают колебания цапфы опоры, измеряют их амплитуды, затем определяют отношения амплитуд колебания цапфы опоры к постоянной амплитуде вектора пульсирующей нагрузки и по уменьшению этого отношения судят о качестве демпфирования, затем варьируют сортами смазки и конструктивными параметрами опоры и по минимальному изменению этого отношения амплитуд при из2. Стенд для получения динамических характеристик опор скольжения, содержащий координатный стол с закрепленным на нем корпусом для установки в нем двух исследуемых опор приводной ротор, механизмы радиального и осевого нагружения, газостатический подпятник, моментоизмери- тель, датчики давления и зазора, отличающийся тем, что, с целью повышения точности при исследовании полусферических гидродинамических опор, приводной ротор выполнен с полусферическими цапфами и снабжен якоC
рем частоторегулируемого асинхронного электродвигателя, статором, установленным посредством двух подшипников качения в упомянутом корпусе с возможностью поворота вокруг ротора, а упомянутый механизм осевого нагружения, выполнен гидравлическим с возможностью перемещения в направлении одной из исследуемых опор, при этом датчики давления установлены в другой исследуемой опоре в одном меридиональном сечении, а датчики зазора - в другом меридиональном сечении этой опоры.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ОТКЛОНЕНИЙ ОСИ ВРАЩЕНИЯ ОБЪЕКТА | 1991 |
|
RU2068990C1 |
| Бесконтактный радиально-упорный подшипник скольжения с внешним источником давления смазки | 1985 |
|
SU1280224A1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| СФЕРИЧЕСКИЙ ЭЛЕКТРОДВИГАТЕЛЬ С ГАЗОСТАТИЧЕСКИМИ ПОДШИПНИКАМИ | 2020 |
|
RU2756523C1 |
| ОПОРНО-ПРИВОДНОЕ УСТРОЙСТВО | 1999 |
|
RU2193703C2 |
| РОТОРНЫЙ МЕХАНИЗМ ЦЕНТРОБЕЖНОЙ УСТАНОВКИ | 2000 |
|
RU2183136C1 |
| Активный упорный гидро/аэростатодинамический подшипниковый узел и способ управления его характеристиками | 2019 |
|
RU2714278C1 |
| КОНИЧЕСКИЙ ЛЕПЕСТКОВЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 2010 |
|
RU2437005C2 |
| ДВУСТОРОННИЙ ОСЕВОЙ ГИБРИДНЫЙ ГАЗОВЫЙ ПОДШИПНИК СО СПИРАЛЬНЫМИ КАНАВКАМИ | 1998 |
|
RU2154753C2 |
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕННОГО БУРЕНИЯ | 1992 |
|
RU2047722C1 |
Использование: в машиностроении, приборостроении для определения динамических характеристик полусферических гидродинамических опор скольжения. Сущность изобретения: ротор разгружают от сил тяжести, а затем измеряют нагрузку по величине и направлению, а также соответствующее ей распределение зазоров и давлений, изменяя после каждого измерения направление нагрузки как по азимуту, так и по полярному углу. Нагружение может быть статическим и динамическим. В случае динамического (вибрационного) нарушения измеряют амплитуду колебаний опоры и ее отношение к амплитуде при постоянной нагрузке и по уменьшению амплитуды определяют качество демпфирования. Предлагаемый способ значительно расширяет диапазон и увеличивает точность измерения динамических опор скольжения. 2 ил. сл
8
Статическое или
пульсирующее давление доз- ij духа%
10
ПКчи.м1ч JwVVd
///S/7/
1 Статическое или яуябсирующее
давление гиарожид хос/т/ Фиг. 2
9
| Способ измерения демпфирования опоры скольжения и стенд для его осуществления | 1979 |
|
SU903728A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
