(а
o-tf
IT
m0 + Am(t)
где К - коэффициент жесткости стенки;
mo собственная масса стенки; A m(t) - текущее значение налипшей массы, имеющее значение A m(t - 0) A mo на начало очистки.
Соответственно, и собственная резонансная частота колебания очищаемой стенки изменяется от
Из (1) и (4) видно, что в выражении (З)мзме- 35 кение частоты и амплитуды A(t) во времени определяется законом изменения Am(t).
Экспериментально установлено, что скрость очистки налипшей массы пропорциональна ее количеству. В произвольный мо- 40 мент времени At отделяется масса А(А т).
Отношение
А (А т)
-т-з- есть средняя скорость очистки. Предел этого отношения4 при A 
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1987 |
|
SU1841021A1 |
| Устройство для автоматического контроля консистенции бетонной смеси в процессе ее приготовления | 1991 |
|
SU1795942A3 |
| УСТРОЙСТВО ОБРАБОТКИ СЕЙСМИЧЕСКИХ СИГНАЛОВ ДЛЯ СИСТЕМ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2003 |
|
RU2242799C1 |
| Устройство для счета движущихся объектов | 1985 |
|
SU1312623A1 |
| Устройство для контроля деградации МДП-структур | 1990 |
|
SU1783454A1 |
| Устройство для управления статическим тиристорным компенсатором | 1985 |
|
SU1309175A1 |
| Способ контроля передаточной функции оптической системы и устройство для его осуществления | 1985 |
|
SU1318821A1 |
| АДАПТИВНЫЙ ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 1990 |
|
RU2012013C1 |
| СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА СИГНАЛОВ С ВРЕМЯИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1990 |
|
RU2030833C1 |
| Устройство для контроля манипулятора | 1988 |
|
SU1657375A1 |
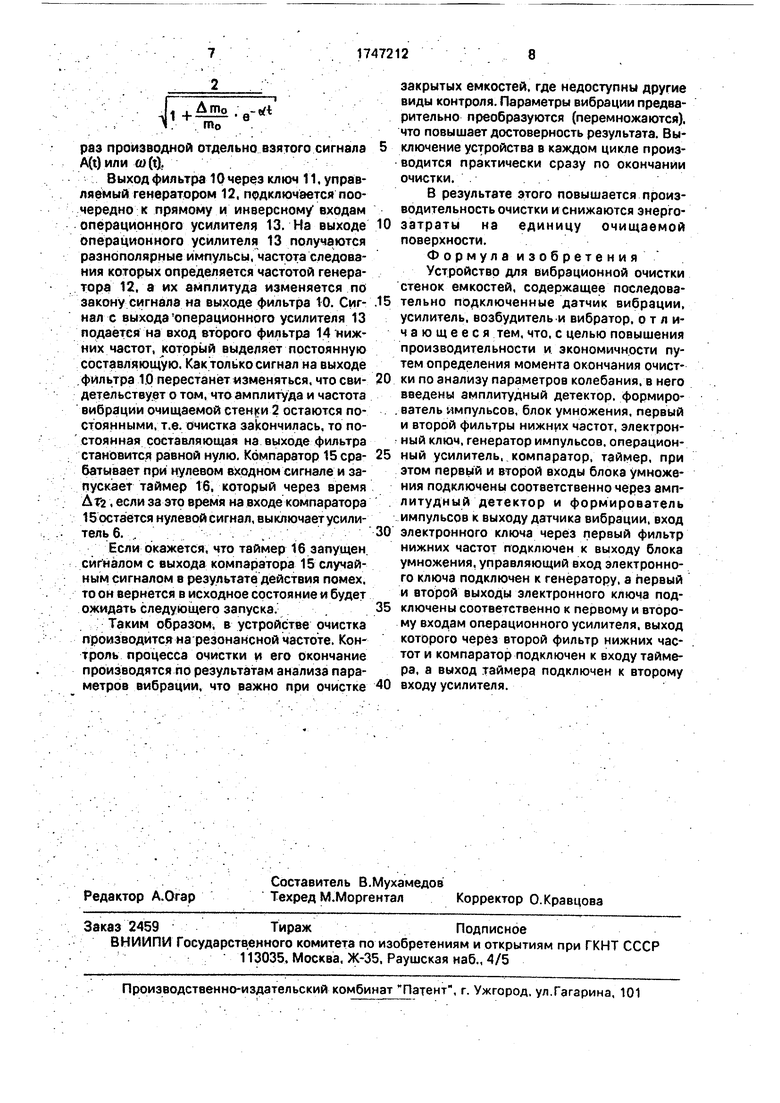
Сущность изобретения: устройство содержит вибратор 3, возбудитель 4, датчик 5 вибрации, усилитель 6, амплитудный детектор 7, формирователь 8 импульсов, блок. 9 умножения, два фильтра 10,14 нижних частот, электродный ключ 11, генератор 12, компаратор 15, таймер 16.1 ил.
Cfj(t 0)
Ofe
f
Amc
mo
до
--Ј
Независимо от амплитуды сигнала датчика 5 вибрации по его частотному параметру усилитель 6 формирует гармонический электрический сигнал с постоянной амплитудой и частотой ft(t), который в вмбровозбуди- теле 4 и вибраторе 3 преобразуется в механические колебания P(t) Ро sin w(t) t
itm m lim -jr-f
At-jo t
dm ЦТ
есть скорость очистки в момент времени t. Так как скорость очистки пропорцио- нальнг налипшей массе и при увеличении времени она убывает, то
d m
55
- am
или
JE -«
m
(5)
где G -коэффициент пропорциональности.
Решение дифференциального уравнения (5) дает зависимость изменения налипшей массы как функции времени
Л m(t) - Л то е
-tft
Таким образом, значение a(t) в формуле (3) с учетом (4) и (6) можно записать как
8(t) ло-в) ,5,„
OJbt
4
1 + Am° . e-«rt
ГЛо
Так как
и 4.Дм..-
11 + то в (7)
Аош
2 m0 & (t)o
то формула (7) преобразуется к виду
a(t)-A,(1-e)
OJbt
J
.t.Amo.0-tft
ГПо
После включений устройства очистка начнется только после достижения амплитудой колебания очищаемой стенки 2 своего установившегося значения
л
.еГПо
,tt
Шо
когда закончится переходной процесс (е Ц)в системе 1, вызванный реакцией стенки 2 на воздействие силы P(t).
Практически это происходит после нескольких периодов колебания стенки 2.
С учетом описанного колебания очищаемой стенки 2 в процессе очистки в зависимости от величины оставшейся налипшей массы описываются формулой
,ч Арfifet
J « - - - - :-L-гт ----т- - ЗтП г.-1 ±L--- г-ь : ,-i 1
4-3,. +4..
из которой видно, что амплитуда и частота колебаний изменяются по одному закону
1
+
Дгоо . -tf-t
ГПо
е
е
to
15
20
Для контроля процесса очистки достаточно контролировать изменение во времени амплитуды или частоты и прекращение их изменения фиксировать как окончание очистки.
В устройстве с целью расширения динамического диапазона измерения и повышения информативности сигнала об изменении параметров вибрации сигналы с выходов амплитудного детектора 7 и формирователя 8 импульсов предварительно перемножаются в блоке 9 умножения. Длительность импульсов Art, формируемых в формирователе импульсов 8, не должна превышать периода их следования при максимальной частоте оь, т.е.
л- %л
25
например
(8)
Art
1,8я
-оЗьГ
Блок 9 умножения представляет собой ключ, управляемый импульсами формирователя 8. На выходе блока 9 умножения м- учэется импульсная последовательность с амплитудой A(t). длительностью Art и частотой f(t)- $ЈЈ. Первым фильтром 10 нижних
частот выделяется постоянная составляющая
iftW
Uio S«j/a A(t) Art dt« A(t) f(t) An,
(Ю)
или с учетом закона изменения налишИей массы сигнал на выходе фильтра равен
АО
.t+Јa
rrfc
55
где Sto- коэффициент передачи фильтра 10, Так как требуется зафиксировать окончание изменения параметров очищаемой стенки 2 во времени, то произведение сигналов дает большую достоверность результата и больший диапазон изменения произведения по сравнению с отдельно взятым сигналом. Первая производная произведения больше в
+
Amp
ГПо
,
раз производной отдельно взятого сигнала А(г)или а) (г).
Выход фильтра 10 через ключ 11. управляемый генератором 12, подключается поочередно к прямому и инверсном/ входам операционного усилителя 13. На выходе операционного усилителя 13 получаются разнополярные импульсы, частота следования которых определяется частотой генератора 12, а их амплитуда изменяется по закону сигнала на выходе фильтра 10. Сигнал с выхода операционного усилителя 13 подается на вход второго фильтра 14 нижних частот, который выделяет постоянную составляющую. Как только сигнал на выходе фильтра 10 перестанет изменяться, что свидетельствует о том, что амплитуда и частота вибрации очищаемой стенки 2 остаются постоянными, т.е. очистка закончилась, то постоянная составляющая на выходе фильтра становится равной нулю. Компаратор 15 срабатывает при нулевом входном сигнале и запускает таймер 16, который через время Дтз если за это время на входе компаратора 15остается нулевой сигнал, выключает усилитель 6.
Если окажется, что таймер 16 запущен сигналом с выхода компаратора 15 случайным сигналом в результате действия помех, то он вернется в исходное состояние и будет ожидать следующего запуска.
Таким образом, в устройстве очистка производится на резонансной частоте. Контроль процесса очистки и его окончание производятся по результатам анализа параметров вибрации, что важно при очистке
закрытых емкостей, где недоступны другие виды контроля. Параметры вибрации предварительно преобразуются (перемножаются), что повышает достоверность результата. Выключение устройства в каждом цикле производится практически сразу по окончании очистки.
В результате этого повышается производительность очистки и снижаются энергозатраты на единицу очищаемой поверхности.
Формула изобретения Устройство для вибрационной очистки стенок емкостей, содержащее последовательно подключенные датчик вибрации, усилитель, возбудитель и вибратор, отличающееся тем, что, с целью повышения производительности и экономичности путем определения момента окончания очистки по анализу параметров колебания, в него введены амплитудный детектор, формирователь импульсов, блок умножения, первый и второй фильтры нижних частот, электронный ключ, генератор импульсов, операционный усилитель, компаратор, таймер, при этом первый и второй входы блока умножения подключены соответственно через амплитудный детектор и формирователь импульсов к выходу датчика вибрации, вход
электронного ключа через первый фильтр нижних частот подключен к выходу блока умножения, управляющий вход электронного ключа подключен к генератору, а первый и второй выходы электронного ключа подключены соответственно к первому и второму входам операционного усилителя, выход которого через второй фильтр нижних частот и компаратор подключен к входу таймера, а выход таймера подключен к второму
0 входу усилителя.
| Авторское свидетельство СССР Nk 997301, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
