Изобретение относится к области робототехники и может быть использовано при создании стендов контроля и диагностики манипулятора.
Целью изобретения является расширение функциональных возможностей устройства за счет обеспечения большей достоверности контроля.
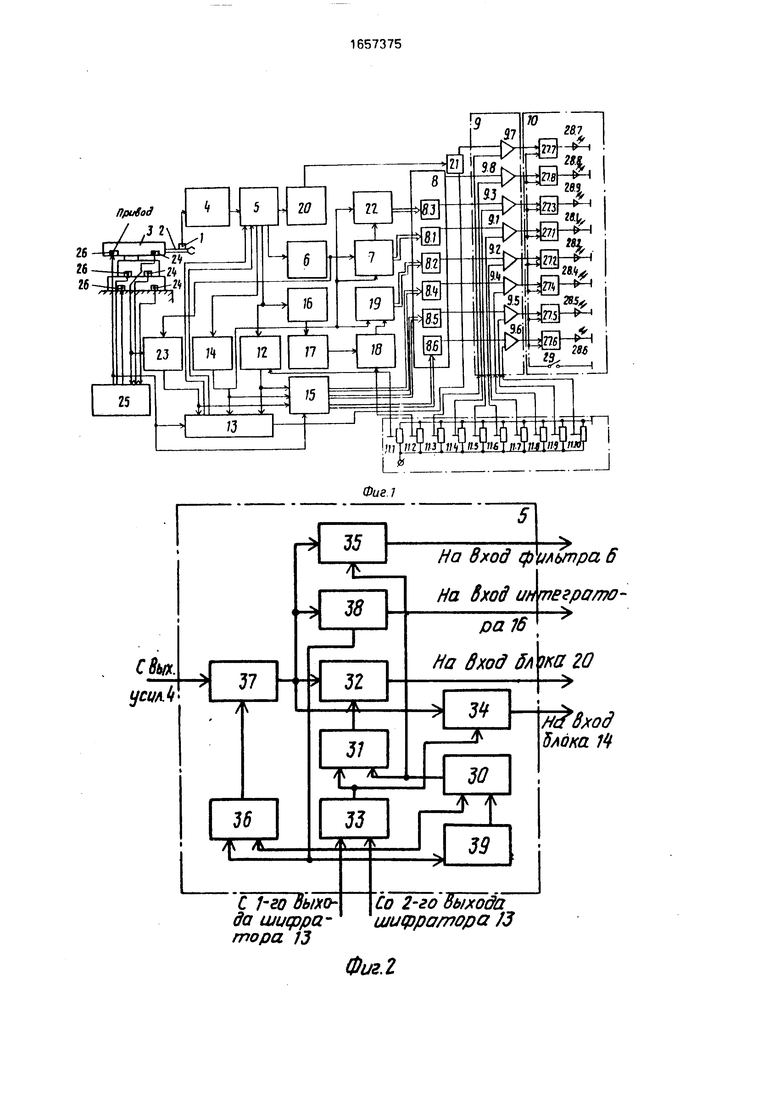
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - схема формирователя импульса начала торможения; на фиг. 4 - схема шифратора; на фиг, 5 - схема формирователя импульса окончания разгона; на фиг.6 - схема таймера; на фиг. 7 - схема формирователя импульса окончания торможения.
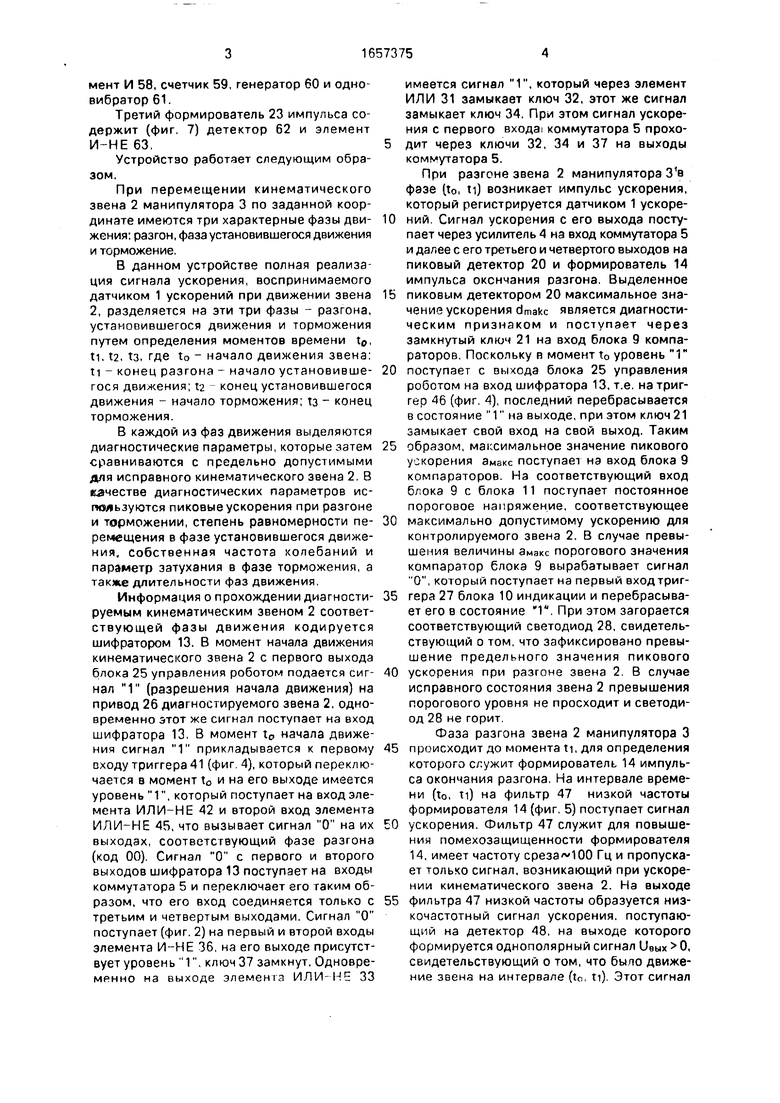
На фиг. 1 указаны датчик 1 ускорения, звено 2. манипулятор 3, усилитель 4, коммутатор 5, фильтр 6 низкой частоты, частотомер 7, блок 8 преобразователей (ЦАП). блок 9 компараторов, блок 10 индикации, блок 11 задатчиков сигнала, первый формирователь 12 импульса, шифратор 13, второй формирователь 14 импульса, таймер 15, интегратор 16, выпрямитель 17, компаратор 18, первый счетчик 19. пиковый детектор 20, ключ 21. второй счетчик 22, третий формирователь 23 импульса, датчики 24 попожения, блок 25 управления, приводы 26, триггеры 27, свето- диоды 28 и ключ 29.
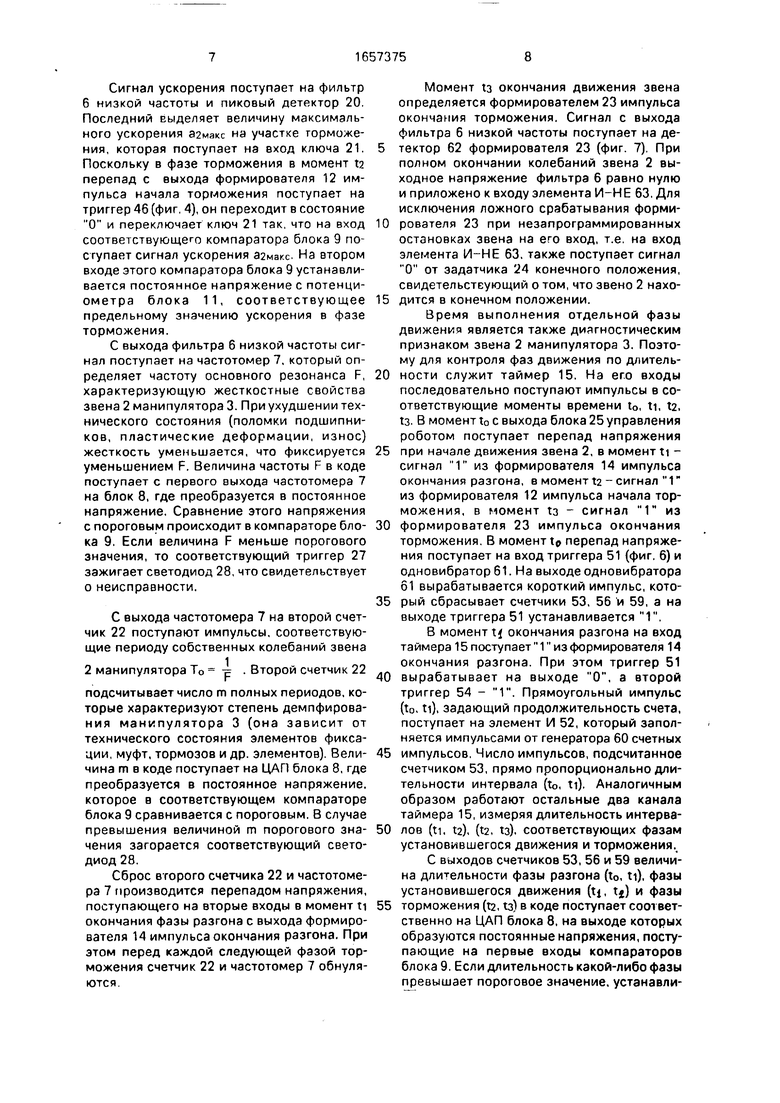
Коммутатор содержит{фиг. 2) элемент И 30, элемент ИЛИ 31, ключ 32, элемент ИЛИ- НЕ 33, ключи 34 и 35, элемент И-НЕ 36, кпючи 37 и 38 и элемент НЕ 39.
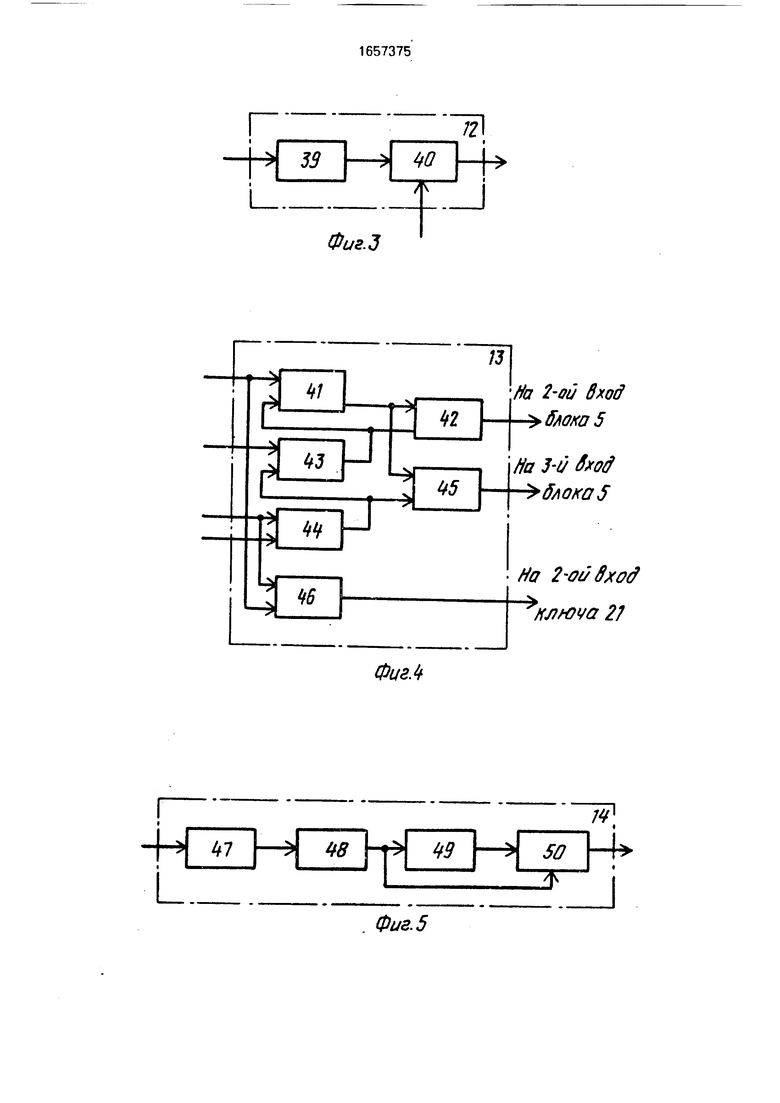
Формирователь 12 импульса содержит (фиг. 3) выпрямитель 39 и компаратор 40.
Шифратор 13 (фиг. 4) включает в себя триггер 41, элемент ИЛИ-НЕ 42, триггеры 43 и 44, элемент ИЛИ-НЕ 45 и триггер 46.
Второй формирователь 14 импульса содержит (фиг. 5) фильтр 47 низкой частоты, детектор 48, одновибратор 49 и элемент И- НЕ50.
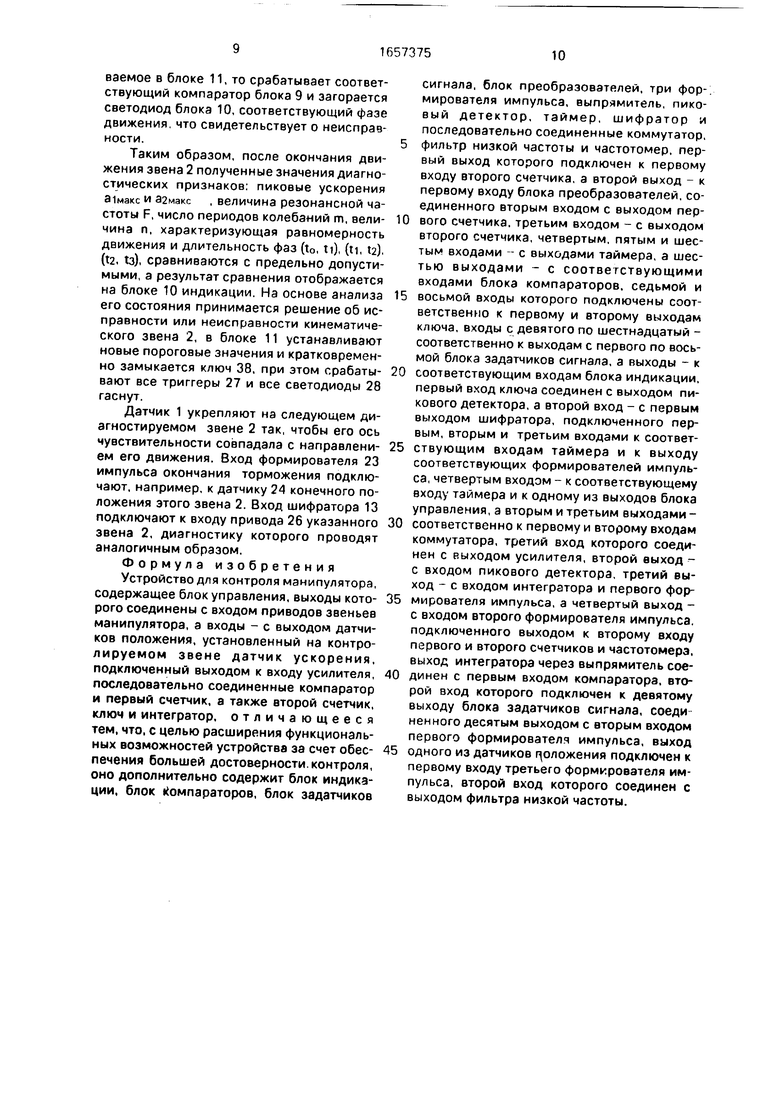
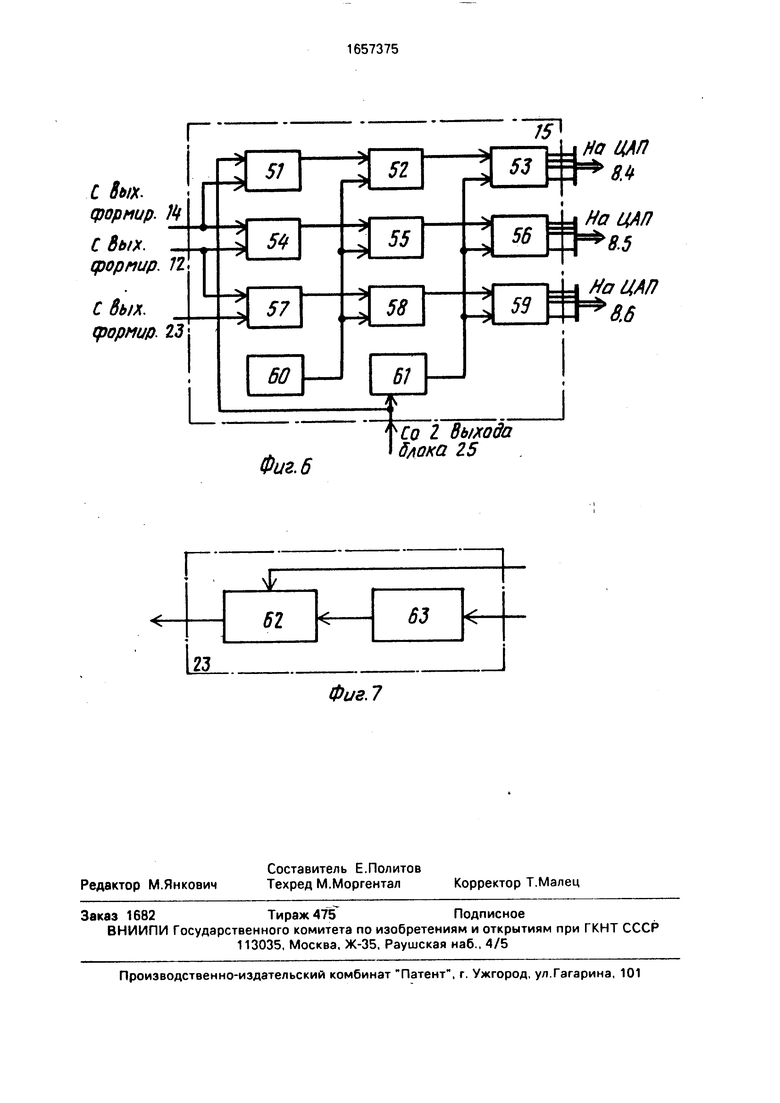
Таймер 15 (фиг. 6) включает в себя триггер 51, элемент И 52, счетчик 53, триггер 54, элемент И 55, счетчик 56, триггер 57, эле-.
Ё
О
ел
VI GJ vj
СП
мент И 58, счетчик 59, генератор 60 и одно- вибратор 61.
Третий формирователь 23 импульса содержит (фиг, 7) детектор 62 и элемент И-НЕ 63.
Устройство работает следующим образом.
При перемещении кинематического звена 2 манипулятора 3 по заданной координате имеются три характерные фазы движения: разгон, фаза установившегося движения и торможение.
В данном устройстве полная реализация сигнала ускорения, воспринимаемого датчиком 1 ускорений при движении звена 2, разделяется на эти три фазы - разгона, установившегося движения и торможения путем определения моментов времени t0, ti, t2, ta, где to - начало движения звена; ti - конец разгона - начало установившегося движения; гл - конец установившегося движения - начало торможения; ta - конец торможения.
В каждой из фаз движения выделяются диагностические параметры, которые затем сравниваются с предельно допустимыми для исправного кинематического звена 2. В качестве диагностических параметров используются пиковые ускорения при разгоне и торможении, степень равномерности перемещения в фазе установившегося движения, собственная частота колебаний и параметр затухания в фазе торможения, а также длительности фаз движения.
Информация о прохождении диагностируемым кинематическим звеном 2 соответствующей фазы движения кодируется шифратором 13. В момент начала движения кинематического звена 2 с первого выхода блока 25 управления роботом подается сигнал 1 (разрешения начала движения) на привод 26 диагностируемого звена 2, одновременно этот же сигнал поступает на вход шифратора 13. В момент t0 начала движения сигнал 1 прикладывается к первому сходу триггера 41 (фиг. 4), который переключается в момент t0 и на его выходе имеется уровень 1, который поступает на вход элемента И Л И-НЕ 42 и второй вход элемента ИЛИ-НЕ 45, что вызывает сигнал О на их выходах, соответствующий фазе разгона (код 00). Сигнал О с первого и второго выходов шифратора 13 поступает на входы коммутатора 5 и переключает его таким образом, что его вход соединяется только с третьим и четвертым выходами. Сигнал О поступает (фиг. 2) на первый и второй входы элемента И-НЕ 36, на его выходе присутствует уровень 1, ключ 37 замкнут. Одновременно на выходе элемета ИЛИ-НЕ 33
имеется сигнал 1, который через элемент ИЛИ 31 замыкает ключ 32, этот же сигнал замыкает ключ 34. При этом сигнал ускорения с первого входа: коммутатора 5 проходит через ключи 32, 34 и 37 на выходы коммутатора 5.
При разгоне звена 2 манипулятора З в фазе (to, ti) возникает импульс ускорения, который регистрируется датчиком 1 ускоре0 ний. Сигнал ускорения с его выхода поступает через усилитель 4 на вход коммутатора 5 и далее с его третьего и четвертого выходов на пиковый детектор 20 и формирователь 14 импульса окончания разгона. Выделенное
5 пиковым детектором 20 максимальное значение ускорения dmakc является диагностическим признаком и поступает через замкнутый ключ 21 на вход блока 9 компараторов. Поскольку в момент t0 уровень 1
0 поступает с выхода блока 25 управления роботом на вход шифратора 13, т.е. на триггер 46 (фиг. 4), последний перебрасывается в состояние 1 на выходе, при этом ключ 21 замыкает свой вход на свой выход. Таким
5 образом, максимальное значение пикового ускорения амакс поступает на вход блока 9 компараторов. На соответствующий вход блока 9 с блока 11 поступает постоянное пороговое напряжение, соответствующее
0 максимально допустимому ускорению для контролируемого звена 2. В случае превышения величины амакс порогового значения компаратор блока 9 вырабатывает сигнал О, который поступает на первый входтриг5 гера 27 блока 10 индикации и перебрасывает его в состояние Г. При этом загорается соответствующий светодиод 28, свидетельствующий о том. что зафиксировано превышение предельного значения пикового
0 ускорения при разгоне звена 2. В случае исправного состояния звена 2 превышения порогового уровня не просходит и светодиод 28 не горит.
Фаза разгона звена 2 манипулятора 3
5 происходит до момента ti, для определения которого служит формирователь 14 импульса окончания разгона. На интервале времени (to, ti) на фильтр 47 низкой частоты формирователя 14 (фиг. 5) поступает сигнал
0 ускорения. Фильтр 47 служит для повышения помехозащищенности формирователя 14, имеет частоту среза 100 Гц и пропускает только сигнал, возникающий при ускорении кинематического звена 2. На выходе
5 фильтра 47 низкой частоты образуется низкочастотный сигнал ускорения, поступающий на детектор 48, на выходе которого формируется однополярный сигнал Увых О, свидетельствующий о том, что было движение звена на интервале (to, ti). Этот сигнал
запускает одновибратор 49 так, что на входе элемента И-НЕ 50 имеется напряжение О. Длительность импульса одновибратора 49 заведомо установлена больше длительности фазы разгона (to, ti). При этом к моменту tj начала установившегося движения на выходе детектора 48 имеется нулевое напряжение, которое поступает на вход элемента И-НЕ 50, а значит, на ее выходе появляется сигнал 1, который поступает на вход шиф- ратора 13 как сигнал окончания разгона. Шифратор 13 при этом в моменту сформирует код (01), соответствующий фазе установившегося движения. В моменту поступления уровня Г (фиг. 4) на первый вход триггера 43 из формирователя 14 импульса окончания разгона на выходе триггера 43 появляется уровень 1 (фиг. 5), При этом триггер 41 устанавливается в состояние О на выходе, на выходе элемента ИЛ И-НЕ 42 имеется сигнал О, а на выходе элемента ИЛИ-НЕ 45 - сигнал 1. Таким образом формируется код 01 на всем интервале(t/, Тд)фазы установившегося движения: На втором входе коммутатора 5 имеется уровень О, а на третьем входе- уровень 1. При этом коммутатор 5 соединяет первый вход с вторым выходом. Второй ключ замкнут и сигнал ускорения с первого входа коммутатора 5 поступает на второй его выход и далее на интегратор 16 и формирователь 12 импульса начала торможения.
На интервале (t 1, t2) установившегося движения диагностическим признаком является равномерность скорости движения звена 2 манипулятора 3. Интегратор 16 из сигнала ускорения формирует сигнал, пропорциональный переменной составляющей скорости
U 4-/ a(t)dW(t),
1 с где a(t) - ускорение звена.
Выпрямитель 17 осуществляет операцию взятия модуля над сигналом U. На его выходе имеется положительное пульсирую- щее напряжение. Это напряжение поступает на вход компаратора 18, на входе с блока 9 которого устанавливается максимально допустимое пороговое значение Unopor 1 неравномерности скорости.
Пороговое значение Unopor поступает в виде постоянного напряжения с выхода порогового блока 11 и имеет разное значение для каждого звена робота.
В случае неравномерного движения ди- агностируемого звена 2 манипулятора 3 на блюдаются выбросы сигнала скорости за значение Unopori. Тогда в момент превышения порогового значения на выходе компаратора 18 появляются импульсы напряжения в соответствии с формулой
/1 при Uewnp Unopori ;
UeblX.KOMn ™ Л
0 при UBbinp Unopori .
Первый счетчик 19 подсчитывает число п импульсов с уровнем 1. Значение п поступает в двоичном параллельном ходе на вход блока 8 ЦАП. На выходе соответствующего цифроаналогового преобразователя блока 8 образуется постоянное напряжение, которое поступает на вход компаратора блока 9. В нем происходит сравнение с пороговым значением сигнала, поступающим с блока 11. В случае превышения постоянным напряжением порогового значения компаратор 9 через триггер 27 зажигает соответствующий светодиод 28. Сброс первого счетчика 19 производится перепадом напряжения, поступающим на его вход в момент ti окончания фазы разгона с выхода формирователя 14 импульса окончания разгона. При этом перед кэждой следующей фазой установившегося движения первый счетчик 19 обнуляется и готов к счету.
Момент t2 окончания фазы установившегося движения определяется с помощью формирователя 12 импульса начала торможения. В момент t2 происходит торможение звена 2 манипулятора 3, возникает (фиг. 3) импульс ускорения, который поступает на выпрямитель 39. Он выделяет модуль значения импульса ускорения (так как азмакс может быть положительным и отрицательным в зависимости от направления движения вперед или назад), который подается на вход компаратора 40. На другой вход последнего поступает пороговое напряжение Unopor.-z с выхода блока 11. Пороговое напряжение Unopor.г. имеет определенное значение для каждого кинематического звена 2. В момент превышения порогового значения Unopor.2. ИМПуЛЬСОМ 32макс НЭ ВЫХОД6
компаратора 40 образуется перепад напряжения, соответствующий моменту 2 начала торможения. Этот перепад поступает на вход шифратора 13 При этом шифратор 13 в момент t2 формирует код (10), соответствующий фазе торможения. Уровень 1 поступает на вход триггера 44 (фиг. 4), у которого на выходе появляется уровень 1, что вызывает переброс триггера 43 в положение О на выходе. При этом на первом выходе шифратора 13 имеется уровень 1, а на втором - О. Этот код поступает на входы коммутатора 5 и переключает его таким образом, что входной сигнал поступает только на первый и третий выходы (на выходе элемента И 30 (фиг. 2) имеется 1, замыкаются ключи 32 и 35).
Сигнал ускорения поступает на фильтр 6 низкой частоты и пиковый детектор 20. Последний выделяет величину максимального ускорения Э2макс на участке торможения, которая поступает на вход ключа 21. Поскольку в фазе торможения в момент t2 перепад с выхода формирователя 12 импульса начала торможения поступает на триггер 46 (фиг. 4), он переходит в состояние О и переключает ключ 21 так, что на вход соответствующего компаратора блока 9 поступает сигнал ускорения Э2макс. На втором входе этого компаратора блока 9 устанавливается постоянное напряжение с потенциометра блока 11, соответствующее предельному значению ускорения в фазе торможения.
С выхода фильтра б низкой частоты сигнал поступает на частотомер 7, который определяет частоту основного резонанса F, характеризующую жесткостные свойства звена 2 манипулятора 3. При ухудшении технического состояния (поломки подшипников, пластические деформации, износ) жесткость уменьшается, что фиксируется уменьшением F. Величина частоты F в коде поступает с первого выхода частотомера 7 на блок 8, где преобразуется в постоянное напряжение. Сравнение этого напряжения с пороговым происходит в компараторе блока 9. Если величина F меньше порогового значения, то соответствующий триггер 27 зажигает светодиод 28, что свидетельствует о неисправности.
С выхода частотомера 7 на второй счетчик 22 поступают импульсы, соответствующие периоду собственных колебаний звена
2 манипулятора Т0 -F Второй счетчик 22
подсчитывает число m полных периодов, которые характеризуют степень демпфирования манипулятора 3 (она зависит от технического состояния элементов фиксации, муфт, тормозов и др. элементов). Величина m в коде поступает на ЦАП блока 8, где преобразуется в постоянное напряжение, которое в соответствующем компараторе блока 9 сравнивается с пороговым. В случае превышения величиной m порогового значения загорается соответствующий светодиод 28.
Сброс второго счетчика 22 и частотомера 7 производится перепадом напряжения, поступающего на вторые входы в момент ti окончания фазы разгона с выхода формирователя 14 импульса окончания разгона. При этом перед каждой следующей фазой торможения счетчик 22 и частотомер 7 обнуляются.
Момент 1з окончания движения звена определяется формирователем 23 импульса окончания торможения. Сигнал с выхода фильтра б низкой частоты поступает на детектор 62 формирователя 23 (фиг. 7). При полном окончании колебаний звена 2 выходное напряжение фильтра 6 равно нулю и приложено к входу элемента И-НЕ 63. Для исключения ложного срабатывания форми0 рователя 23 при незапрограммированных остановках звена на его вход, т.е. на вход элемента И-НЕ 63. также поступает сигнал О от задатчика 24 конечного положения, свидетельствующий о том, что звено 2 нахо5 дится в конечном положении.
Время выполнения отдельной фазы движения является также диагностическим признаком звена 2 манипулятора 3. Поэтому для контроля фаз движения по длитель0 ности служит таймер 15. На его входы последовательно поступают импульсы в соответствующие моменты времени to, ti, t2, t3. В момент to с выхода блока 25 управления роботом поступает перепад напряжения
5 при начале движения звена 2, в момент ti - сигнал 1 из формирователя 14 импульса окончания разгона, в момент t2 - сигнал 1 из формирователя 12 импульса начала торможения, в момент t3 сигнал 1 из
0 формирователя 23 импульса окончания торможения. В момент to перепад напряжения поступает на вход триггера 51 (фиг. 6) и одновибратор 61. На выходе одновибратора 61 вырабатывается короткий импульс, кото5 рый сбрасывает счетчики 53, 56 и 59, а на выходе триггера 51 устанавливается 1.
В момент tf окончания разгона на вход таймера 15 поступает Т изформирователя 14 окончания разгона. При этом триггер 51
0 вырабатывает на выходе О, а второй триггер 54 - 1. Прямоугольный импульс (t0. ti), задающий продолжительность счета, поступает на элемент И 52, который заполняется импульсами от генератора 60 счетных
5 импульсов, Число импульсов, подсчитанное счетчиком 53, прямо пропорционально длительности интервала (to, ti). Аналогичным образом работают остальные два канала таймера 15, измеряя длительность интерва0 лов (ti. ta), (t2, ta), соответствующих фазам установившегося движения и торможения. С выходов счетчиков 53, 56 и 59 величина длительности фазы разгона (to, ti), фазы установившегося движения (tj, t) и фазы
5 торможения (ta, ta) в коде поступает соответственно на ЦАП блока 8, на выходе которых образуются постоянные напряжения, поступающие на первые входы компараторов блока 9. Если длительность какой-либо фазы превышает пороговое значение, устанавливаемое в блоке 11, то срабатывает соответствующий компаратор блока 9 и загорается светодиод блока 10, соответствующий фазе движения, что свидетельствует о неисправности.
Таким образом, после окончания движения звена 2 полученные значения диагностических признаков: пиковые ускорения Э1макс и Э2макс , величина резонансной частоты F, число периодов колебаний т, величина п, характеризующая равномерность движения и длительность фаз (to, ti), (ti, ta), (t2, 1з), сравниваются с предельно допустимыми, а результат сравнения отображается на блоке 10 индикации. На основе анализа его состояния принимается решение об исправности или неисправности кинематического звена 2, в блоке 11 устанавливают новые пороговые значения и кратковременно замыкается ключ 38, при этом срабатывают все триггеры 27 и все светодиоды 28 гаснут.
Датчик 1 укрепляют на следующем диагностируемом звене 2 так, чтобы его ось чувствительности совпадала с направлением его движения. Вход формирователя 23 импульса окончания торможения подключают, например, к датчику 24 конечного положения этого звена 2. Вход шифратора 13 подключают к входу привода 26 указанного звена 2, диагностику которого проводят аналогичным образом.
Формула изобретения
Устройство для контроля манипулятора, содержащее блок управления, выходы которого соединены с входом приводов звеньев манипулятора, а входы - с выходом датчиков положения, установленный на контролируемом звене датчик ускорения, подключенный выходом к входу усилителя, последовательно соединенные компаратор и первый счетчик, а также второй счетчик, ключ и интегратор, отличающееся тем, что, с целью расширения функциональных возможностей устройства за счет обеспечения большей достоверности, контроля, оно дополнительно содержит блок индикации, блок Компараторов, блок задатчиков
сигнала, блок преобразователей, три фор-, мирователя импульса, выпрямитель, пиковый детектор, таймер, шифратор и последовательно соединенные коммутатор,
фильтр низкой частоты и частотомер, первый выход которого подключен к первому входу второго счетчика, а второй выход - к первому входу блока преобразователей, соединенного вторым входом с выходом первого счетчика, третьим входом - с выходом второго счетчика, четвертым, пятым и шестым входами - с выходами таймера, а шестью выходами - с соответствующими входами блока компараторов, седьмой и
восьмой входы которого подключены соответственно к первому и второму выходам ключа, входы с девятого по шестнадцатый - соответственно к выходам с первого по восьмой блока задатчиков сигнала, а выходы - к
соответствующим входам блока индикации, первый вход ключа соединен с выходом пикового детектора, а второй вход - с первым выходом шифратора, подключенного первым, вторым и третьим входами к соответствующим входам таймера и к выходу соответствующих формирователей импульса, четвертым входом - к соответствующему входу таймера и к одному из выходов блока управления, а вторым и третьим выходами соответственно к первому и второму входам коммутатора, третий вход которого соединен с выходом усилителя, второй выход - с входом пикового детектора, третий выход - с входом интегратора и первого формирователя импульса, а четвертый выход - с входом второго формирователя импульса, подключенного выходом к второму входу первого и второго счетчиков и частотомера, выход интегратора через выпрямитель соединен с первым входом компаратора, второй вход которого подключен к девятому выходу блока задатчиков сигнала, соеди немного десятым выходом с вторым входом первого формирователя импульса, выход
одного из датчиков сложения подключен к первому входу третьего формирователя импульса, второй вход которого соединен с выходом фильтра низкой частоты.
Привод
С 1-го Выхо- да шифратора J3
На вход фильтра 6
На Вход ин(пегрояю-
1ка 20
Злака Щ
Со 2-го Выхода шифра/пора /J

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом робота | 1985 |
|
SU1257608A1 |
| Устройство для регулирования режимов работы скиповых подъемных установок | 1987 |
|
SU1430334A1 |
| Устройство для управления приводом робота | 1989 |
|
SU1646852A1 |
| Устройство для прогнозирования ресурса работы механических систем | 1984 |
|
SU1247897A1 |
| Устройство для диагностики подшипниковых узлов механических систем | 1982 |
|
SU1021947A1 |
| Устройство для управления электроприводом робота | 1982 |
|
SU1092462A1 |
| Устройство для ввода информации | 1982 |
|
SU1083177A1 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
| Устройство управления шаговым двигателем | 1987 |
|
SU1539727A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
Изобиетение относится к робототехнике и может быть использовано при создании стендов контроля и диагностики манипулятора. Целью изобретения является расширение функциональных возможностей устройства за счет обеспечения большей достоверности контроля. В устройство введены формирователи импульса, выпрямитель, пиковый детектор, фильтр низкой частоты, коммутатор, частотомер, таймер, блок индикации, блек преобразователей, блок компараторов и блок задатчиков сигнала, позволяющий увеличить объем и глубину контроля манипулятора. 7 ил.
Фиг2
Фиг.З
-К
L.
47
40
Фиг А
Ъ
W
50
-J
Фиг. 5
Фиг. 6
Фиг.7
На ЦАП
8Л
На ЦАП 8.5
НаЦАП Г 8.6
Со 2 Выхода SAOKU 25
| Устройство для контроля работы промышленных роботов | 1984 |
|
SU1198554A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
