Изобретение относится к способам проброса прокладчика уточной нити в боевых механизмах бесчелночных ткацких станков.
Известные способы основаны на взведении разгонного упругого элемента (торси- она, пружины) боевого механизма с последующим его спуском. При этом рычаг- погонялка разгоняет и бросает прокладчик с зажатой уточной нитью.
Аккумулируемая в упругом элементе потенциальная энергия деформации Е0 расходуется на бросок прокладчика (полезная часть энергии - Еп) и на сопутствующее движение частей боевого механизма (вспомогательная часть энергии).
Полезная часть энергии равна
Еп
m V&
где m - масса прокладчика;
VM - максимальная скорость разгона прокладчика.
Недостатком известных способов броска является низкое значение коэффициента использования энергии
СО
С
-ir
(2)
звеси-а с чаг- чик
посхонаявиога(1)
она
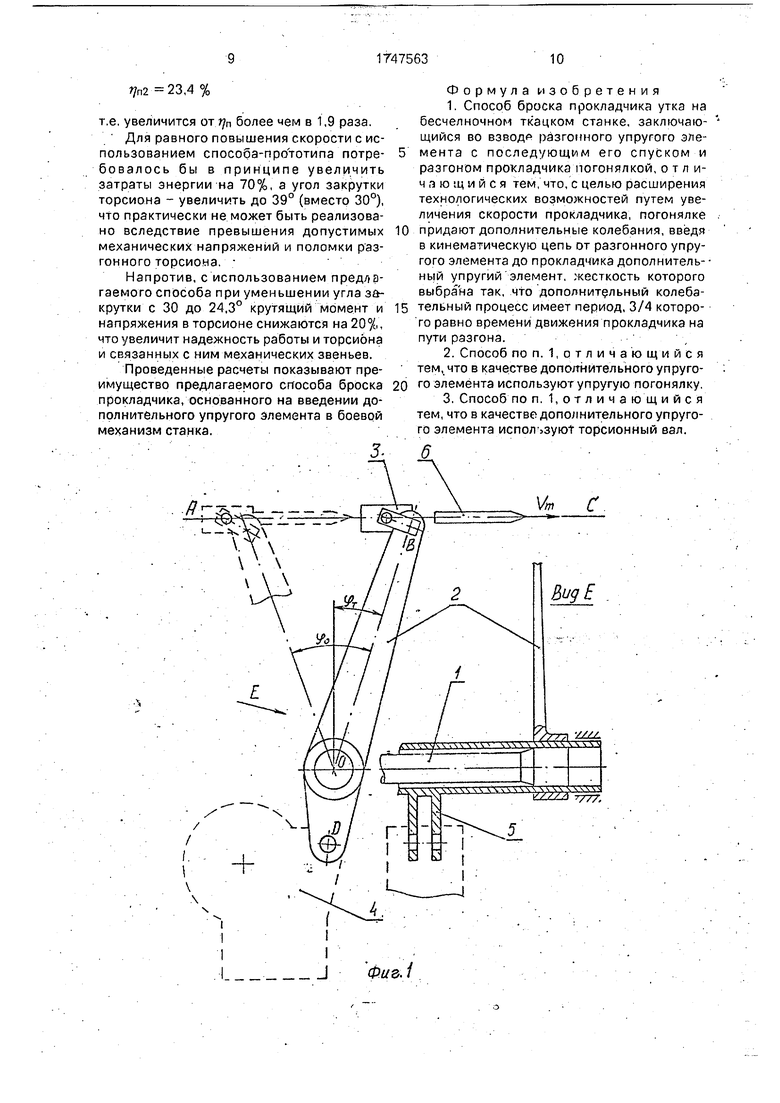
Известен способ броска прокладчика, реализуемый в бесчелночных ткацких станках (например, в станке типа СТБ и аналогичных станках зарубежных фирм). Боевой механизм таких станков приведен на фиг. 1. Механизм имеет в качестве разгонного упругого элемента торсионный вал 1, погонялку 2 с гонком 3, кулачково-рычажный узел 4 взвода, связанный с погонялкой проушинами 5
При работе с помощью узла 4 взводят торсион 1 с поворотом погонялки 2 на заданный угол. Перед гонком 3 устанавливают прокладки 6. После спуска торсион раскручивается, разгоняя через погонялку прокладчик 6 до заданной скорости.
2
XI 01 О CJ
Недостатком данного способа является большое энергопотребление, связанное с низким коэффициентом использования энергии, идущей на полезную работу - бросок прокладчика утка, При этом, в частности, ограничивается и скорость броска прокладчика.
Указанный недостаток обусловлен специфическим для прототипа жестким соотношением между углом закрутки торсиона и скоростью броска прокладчика Ум, а в общем виде между потенциальной энергией Ео закрученного торсионного вала, как функции (fa, поскольку
Ео -
(f&,
(3)
где G - модуль упругости при сдвиге;
Г1 - полярный момент инерции; - длина торсионного вала; и кинетической энергией Еп разогнанного прокладчика, как функции VM.
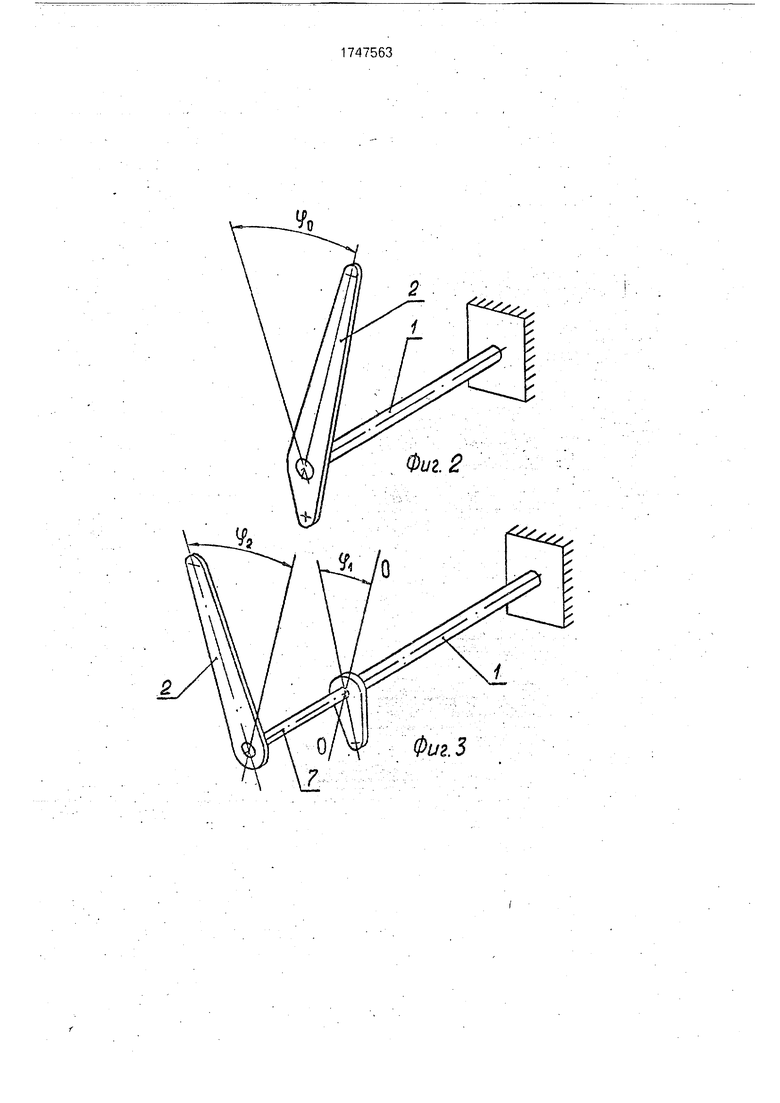
Действительно, механизм, реализующий данный способ, представляет собой систему с.одной степенью свободы (фиг. 2), уравнение движения которого можно записать в виде
- ф-К ip,
где I - приведенный момент инерции движущихся частей механизма;
« -угол поворота рычага погонялки;
ф - соответствующее угловое ускорение;
К - коэффициент жесткости торсиона.
Решив данное уравнение, для максимальной скорости разгона прокладчика можем получить
VM р -ф
(4)
где - круговая частота;
R - радиус рычага погонялки;
р0 угол закрутки торсиона;
tp - угол в момент достижения VM (перед торможением погонялки).
Поскольку для реального боевого механизма ткацкого станка величины р, R и г фиксированы, то, как следует из формулы (4), скорость VM зависит только от угла закрутки торсиона или с учетом формул (1) и (3) полезная Еп и полная Е0 энергии жестко связаны через эти фиксированные величины. Соответственно, для данного способа полезная энергия не может быть увеличена без увеличения потребляемой энергии.
Отмеченный недостаток является немаловажным, поскольку в ткацком станке боевой механизм стоит в ряду основных потребителей энергии, а сами станки относятся, в основном, к оборудованию круглосуточной работы.
Цель изобретения - расширение технологических возможностей при снижении затрат энергии на работу боевого
0 механизма, реализующего предлагаемый способ броска, а также возможностей по повышению скорости броска прокладчика, в том числе в определенном диапазоне со снижением или без изменения пбтребля5 емой энергии.
Указанная цель достигается за счет организации такого процесса движения частей механизма, при котором вводятся новые факторы, определяющие зависимость меж0 ДУ полезной и потребляемой энергией. Для этого в механизм вводится дополнительная упругая связь между подвижным концом разгонного торсионного вала и прокладчиком. Тем самым система механизма стано5 вится системой с двумя степенями свободы и жесткостные характеристики дополнительного упругого элемента могут быть подобраны такими, чтобы за счет организованного колебательного процесса
о разгона повышалась кинетическая энергия бросаемого прокладчика, что представляет существенное отличие от способа-прототипа. Введение в систему дополнительного упругого элемента позволяет либо снизить
с затраты потребляемой энергии при обеспечении тех же, что и в прототипе, скоростей броска (разгона) прокладчика, либо при тех же или меньших затратах энергии повысить скорость броска прокладчика, например,
Q при реализации тенденции по увеличению рабочей ширины ткацких станков.
Согласно изобретению при снижении потребляемой энергии, т.е. при уменьшении угла закрутки разгонного торсиона, в звеньс ях станка, подводящих движение к боевому механизму, и в звеньях самого механизма снижаются усилия и напряжения, что ведет к снижению шума и повышению надежности работы механизмов,
В качестве дополнительного упругого
0
5
элемента используют упругую погонялку либо торсионный вал, устанавливаемый между подвижным концом разгонного торсиона и прокладчиком.
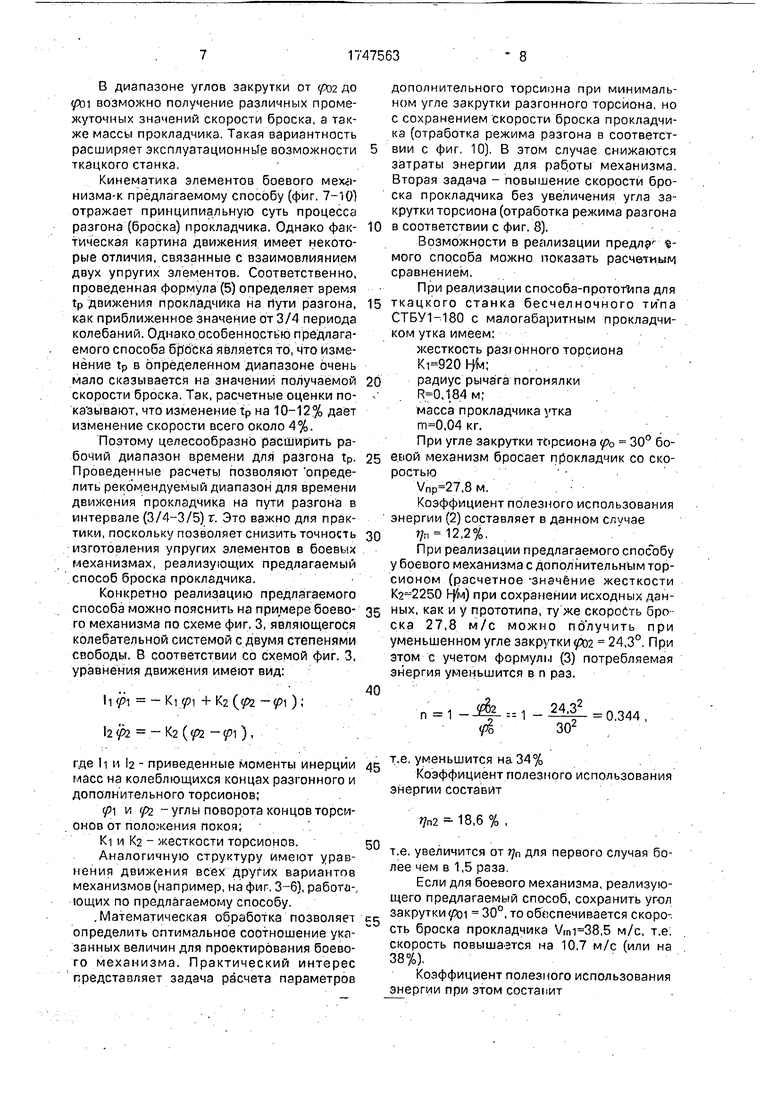
На фиг. 1 приведена конструктивная схема боевого механизма, реализующего способ-прототип; на фиг. 2 - принципиальная схема механизма по фиг. 1; на фиг. 3-6 - примеры схем боевых механизмов, реализующих способ броска по изобретению; на фиг. 7 - график скорости разгона прокладчика для прототипа; на фиг. 8 - график скорости разгона при равенстве углов закрутки; на фиг. 9 - график относительной скорости; на фиг. 10 - график скорости разгона при равенстве Vmax
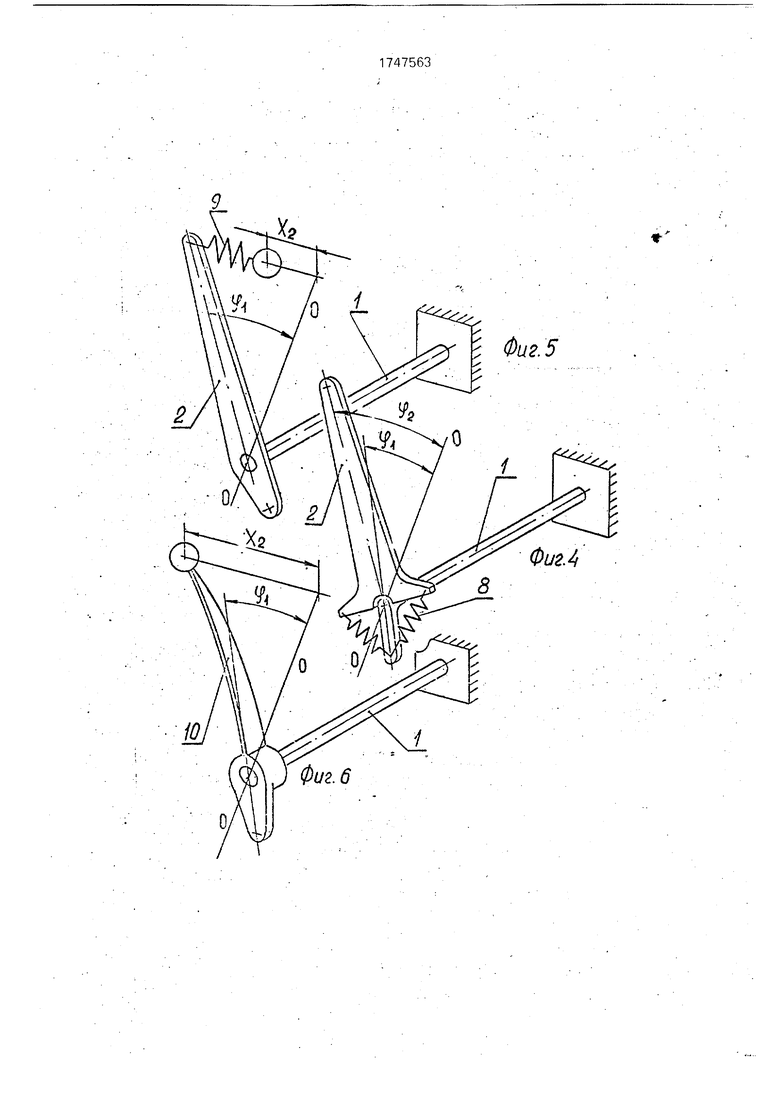
На фиг. 3-6 представлен ряд примеров схем боевого механизма с двумя степенями свободы его упругой системы, реализующих предлагаемый способ броска прокладчика. Во всех случаях одна степень свободы системы определяется крутильными колебаниями разгонного упругого элемента (торсиона) (t), вторая - дополнительно введенным упругим элементом,
В схеме фиг. 3 таким упругим элементом является дополнительный торсион 7 и вторая степень свободы определяется углом (t).
В схеме по фиг. 4 рычаг погонялки 2 имеет возможность поворачиваться относительно конца торсиона 1, причем движение рз - рз (t) определяется упругим элементом в виде пружинного узла 8.
В схеме по фиг. 5 упругий элемент в виде пружинного узла 9 расположен на конце рычага погонялки и вторая степень свободы определяется перемеще-нием Х2 РА (t).
В схеме по фиг. 6 в качестве дополнительного упругого элемента выступает упругий рычаг-погонялка 10, обуславливая дополнительную степень свободы Х2 (f5 (t).
Для предлагаемого изобретения существенно то, что в отличие от способа-прототипа, реализуемого в боевом механизме по фиг. 2, по предлагаемому способу в кинематическую цепь механизма от разгонного упругого элемента до прокладчика вводят дополнительный упругий элемент, например 7, 8, 9,10, показанный на фиг. 3-6 соответственно.
Изменяя входные параметры колебательной системы, в частности жесткость дополнительного упругого элемента, можно на заданном пути разгона прокладчика изменять скорость его броска.
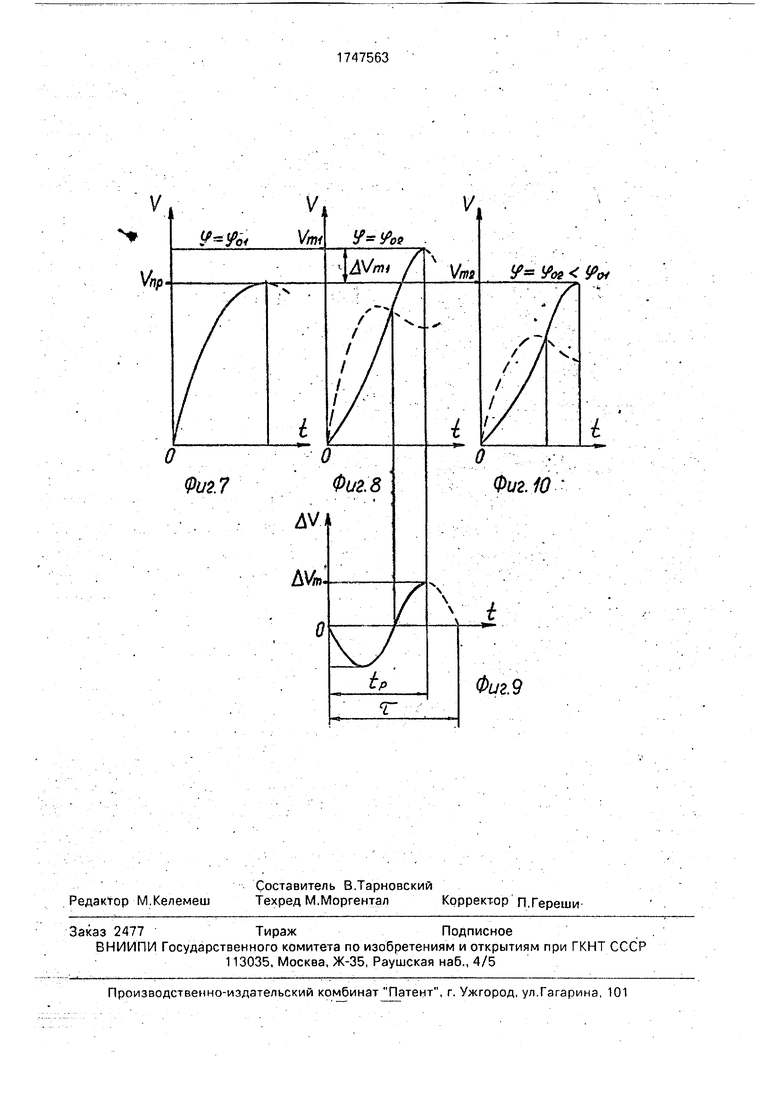
На фиг. 7 приведен график изменения скорости прокладчика по времени для прототипа при угле закрутки торсиона (р, равном .
Кинематика механизма по изобретению представлена двумя кривыми (фиг. 8). Сплошной линией показано изменение скорости реального прокладчика (с учетом введения дополнительного упругого элемента), пунктиром - скорость условного (воображаемого) прокладчика, толкаемого условнрй
же погонялкой, сидящей на конце разгонного торсионного вала.
В первой фазе движения (фиг 8) скорость прокладчика меньше условной скорости
Во второй фазе ко времени разгона tp скорость прокладчика превышает условную скорость.
На фиг. 9 дан сопряженный с фиг 8 график относительной скорости AV в этих
0 процессах. График Л V(t) ясно выявляет колебательный характер разгона прокладчика, хотя фаза разгона занимает только часть колебательного цикла с периодом г.
Параметры введенного упругого эле5 мента, в частности жесткость, выбираются такими, чтобы, как это следует из графиков фиг. 8 и 9, время разгона прокладчика tp до максимальной скорости было близко по значению к 3 /4 периода г колебания сис0 темы
tp -0,75г.
(5)
При этом фазы колебательных процес- сов для торсиона и прокладчика при времени разгона tp складываются так, что без изменения угла закрутки ( ) обеспечивается максимальное повышение ско- рости разгона прокладчика, т.е.
Vm1 Vnp,
где Vmi - скорость разгона прокладчика при
броске по предлагаемому способу; Vnp - скорость разгона прокладчика при известном способе броска.
На фиг. 10 приведен график скорости разгона прокладчика при броске по предлагаемому способу с уменьшением угла за- КРУТКИ pQ2 торсиона:
рС2 ро
За счет организации описанного коле- бательного процесса можно найти такое значение угла 02, при котором скорость разгона Vm2 будет равна скорости, получаемой в прототипе, т.е.
50
.
Представленные на фиг. 8 и 10 графики показывают, что при реализации способа броска по изобретению при подборе пара- метров, реализующих соотношение (5), возможно повышение скорости бросания прокладчика либо снижение потребляемой энергии.
В диапазоне углов закрутки от ро2 до ро возможно получение различных промежуточных значений скорости броска, а также массы прокладчика Такая вариантность расширяет эксплуатационное возможности ткацкого станка.
Кинематика элементов боевого низма-к предлагаемому способу (фиг. 7-10) отражает принципиальную суть процесса разгона (броска) прокладчика. Однако фактическая картина движения имеет некоторые отличия, связанные с взаимовлиянием двух упругих элементов. Соответственно, проведенная формула (5) определяет время tp движения прокладчика на Пути разгона, как приближенное значение от 3/4 периода колебаний. Однако особенностью предлагаемого способа броска является то, что изменение tp в определенном диапазоне очень мало сказывается на значении получаемой скорости броска. Так, расчетные оценки показывают, что изменение tp на 10-12% дает изменение скорости всего около 4%.
Поэтому целесообразно расширить рабочий диапазон времени для разгона tp. Проведенные расчеты позволяют определить рекомендуемый диапазон для времени движения прокладчика на пути разгона в интервале (3/4-3/5) т. Это важно для практики, поскольку позволяет снизить точность изготовления упругих элементов в боевых механизмах, реализующих предлагаемый способ броска прокладчика.
Конкретно реализацию предлагаемого способа можно пояснить на примере боевого механизма по схеме фиг. 3, являющегося колебательной системой с двумя степенями свободы. В соответствии со схемой фиг. 3, уравнения движения имеют вид:
Н fa - KI tp + K2 () ;
2 fa - К2 (р2 $01 ) ,
где И и 2 - приведенные моменты инерции гласе на колеблющихся концах разгонного и дополнительного торсионов;
р и (fa -углы поворота концов торсионов от положения покоя;
Кт и - жесткости торсионов.
Аналогичную структуру имеют уравнения движения всех других вариантов механизмов (например, на фиг. 3-6), работающих по предлагаемому способу.
.Математическая обработка позволяет определить оптимальное соотношение указанных величин для проектирования боевого механизма. Практический интерес представляет задача расчета параметров
дополнительного торсиона при минимальном угле закрутки разгонного торсиона, но с сохранением скорости броска прокладчика (отработка режима разгона в соответст- вии с фиг 10) В этом случае снижаются затраты энергии для работы механизма Вторая задача - повышение скорости броска прокладчика без увеличения угла закрутки торсиона (отработка режима разгона 0 в соответствии с фиг. 8).
Возможности в реализации предлэг $- мого способа можно показать расчетным сравнением.
При реализации способа-протоГипа для 5 ткацкого станка бесчелночного ти па СТБУ1-180 с малогабаритным прокладчиком утка имеем:
жесткость разюнного торсиона
ДОи 0 радиус рычага погонялки
,184м;
масса прокладчика утка
,04 кг.
При угле закрутки торсиона (р0 30° бо- 5 евой механизм бросает прокладчик со скоростью
,8 м.
Коэффициент полезного использования энергии (2)составляет в данном случае 0 /п 12,2%,
При реализации предлагаемого способу у боевого механизма с дополнительным тор- сионом (расчетное -значение жесткости FfM) при сохранении исходных дан- 5 ных. как и у прототипа, ту же скорость бро ска 27,8 м/с можно получить при уменьшенном угле закрутки ро2 - 24,3°. При этом с учетом формулы (3) потребляемая энергия уменьшится в п раз.
0
л « $Л 1 24.32 п лл п 1 -- 1-х- - 0,344 ,
06ЗО2
т.е. уменьшится на 34%
Коэффициент полезного использования энергии составит
/п2 18,6 % ,
т.е. увеличится от rjn для первого случая более чем в 1,5 раза
Если для боевого механизма, реализующего предлагаемый способ, сохранить угол закрутки (poi 30°, то обеспечивается скорость броска прокладчика ,5 м/с, т.е скорость повышаэтся на 10,7 м/с (или на 38%)
Коэффициент полезного использования энергии при этом состапит
fjn2 23,4 %
т.е. увеличится от т/п более чем в 1,9 раза.
Для равного повышения скорости с использованием способа-прототипа потре- бовалось бы в принципе увеличить затраты энергии на 70%, а угол закрутки торсиона - увеличить до 39° (вместо 30°), что практически не может быть реализовано вследствие превышения допустимых механических напряжений и поломки разгонного торсиона.
Напротив, с использованием предлагаемого способа при уменьшении угла закрутки с 30 до 24,3° крутящий момент и напряжения в торсионе снижаются на 20%, что увеличит надежность работы и торсиона и связанных с ним механических звеньев.
Проведенные расчеты показывают преимущество предлагаемого способа броска прокладчика, основанного на введении дополнительного упругого элемента в боевой механизм станка.
Лг&
Формула изобретения 1. Способ броска прокладчика утка на бесчелночном ткацком станке, заключающийся во ВЗВОДР разгонного упругого элемента с последующим его спуском и разгоном прокладчика погонялкой, отличающийся тем, что, с целью расширения технологических возможностей путем увеличения скорости прокладчика, погонялке придают дополнительные колебания, введя в кинематическую цепь от разгонного упругого элемента до прокладчика дополнитель- ный упругий элемент, жесткость которого выбрана так, что дополнительный колебательный процесс имеет период, 3/4 которого равно времени движения прокладчика на пути разгона.
2.Способ по п. 1,отличающийся тем, что в качестве дополнительного упругого элемента используют упругую погонялку.
3,Способ поп. 1,отличающийся тем, что в качестве дополнительного упругого элемента исполчзукУГ торсионный вал.
6
V С
| название | год | авторы | номер документа |
|---|---|---|---|
| Боевой механизм ткацкого станка | 1990 |
|
SU1730248A1 |
| БОЕВОЙ МЕХАНИЗМ ТКАЦКОГО СТАНКА | 1990 |
|
RU2011706C1 |
| Боевой механизм бесчелночного ткацкого станка | 1987 |
|
SU1527341A1 |
| БОЕВОЙ МЕХАНИЗМ БЕСЧЕЛНОЧНОГО ТКАЦКОГО СТАНКА | 1996 |
|
RU2107762C1 |
| Боевой механизм ткацкого станка | 1979 |
|
SU829742A1 |
| Боевой механизм ткацкого станка | 1989 |
|
SU1726595A1 |
| БОЕВОЙ МЕХАНИЗМ БЕСЧЕЛНОЧНОГО ТКАЦКОГО СТАНКА С ЗАЖИМНЫМИ ЧЕЛНОКАМИ | 1990 |
|
RU2071515C1 |
| Боевой механизм ткацкого станка | 1988 |
|
SU1528825A1 |
| Боевой механизм бесчелночного ткацкого станка | 1987 |
|
SU1520158A1 |
| Боевой механизм бесчелночного ткацкого станка | 1985 |
|
SU1303639A1 |
Зажимной челнок разгоняют посредством разгонного упругого элемента. Разгонный упругий элемент связан с погонялкой, имеющий боек. Челноку придают дополнительные колебания посредством дополнительного упругого элемента, введенного в кинематическую связь между разгонным упругим элементом и челноком Жесткость дополнительного упругого элемента подобрана так, что дополнительный колебательный процесс имеет период, 3/4 которого равно времени движения челнока по пути разгона. 2 з.п.ф-лы, 10 ил.
II Фие.1
Фиг.З
. 5
| Боевой механизм ткацкого станка | 1979 |
|
SU829742A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
