Изобретение относится к уравновешиванию и может быть использовано для исключения вибраций, передающихся на фундамент машинного агрегата от механизма шарнирного четырехзвенника с ведущим звеном, вращающимся с постоянной угловой скоростью.
Известен механизм шарнирного четырехзвенника, состоящий из неподвижной стойки, кривошипа, шатуна и коромысла. Звенья соединены между собой шарнирно в следующей последовательности: стойка - кривошип, кривошип - шатун, шатун - коромысло, коромысло - стойка,
Однако распределением масс подвижных звеньев механизма обеспечивается равенство нулю главного вектора сил инерции. Главный момент сил инерции остается неуравновешенным, это приводит к тому, что на фундамент машинного агрегата передаются периодически изменяющиеся нагрузки, т.е. механизм будет источником
вибраций машинного агрегата. Для уравновешивания главного момента необходимо вводить дополнительные звенья.
Наиболее близким к изобретению является механизм шарнирного четырехзвенника, в который вводится уравновешивающее устройство, состоящее из двух стержней, соединенных между собой шарниром и крепящихся шарнирно к кривошипу и стойке таким образом, что стержни, кривошип и стойка образуют между собой пзраллелог- раммный контур. Соотношения длин уравновешивающих звеньев, координаты точек их крепления к стойке и параметры геометрии масс уравновешивающих звеньев определяются из условия равенства нулю главного вектора сил инерции и условия уравновешенности первой гармоники главного момента сил инерции механизма. Механизм имеет равный нулю главный вектор сил инерции и уравновешенную первую гармонику главного момента сил инерции, а
С/1
С
XI N3 Ю О О
величина главного момента неуравновешенных сил уменьшается на величину первой гармоники.
Недостатком известного решения яв- лется неуравновешенность второй и последующих гармоник главного момента сил инерции, т.е. механизм будет оставаться источником вибраций фундамента машинного агрегата. Наличие вибраций фундамента машинного агрегата приводит к уменьшению надежности и долговечности узлов машины.
Целью изобретения является повышение надежности и долговечности машинного агрегата за счет полного уравновешивания главного вектора и главного момента сил инерции шарнирного четырехзвенника.
Для достижения поставленной цели в известном шарнирном четырехзвеннике, содержащем установленные на стойке кривошип и коромысло, связанные между собой шатуном, а также механизм уравновешивания в виде дополнительного шарнирного четырехзвенника, выполненного подобным контуру шарнирного четырехзвенника, кривошипы обоих четырехзвен- ников жестко соединены, а параметры механизма определены зависимостями
Is/le I3/I2; 5уз + 1з5У2/12 0: Sys + IsSye/le 0; Sy.+ li (mi - Sy2/l2) + l5d (terns + Sye) соз(5) 0;
J3 + l32Sy2/l2 - J5 - l52Sy6/l6 0;
J2 - l2Sy2 - Je + 1б.5уб 0;
Sxi + Isd (lems + Sye) sin(5)/l3le 0;
Sx2 0; Sx3 0; SX5 0; SX6 0,
где h, 12, Is, Is, le - длины соответствующих звеньев;
d - расстояние между шарнирами, соединяющими кривошип и коромысло со стойкой;
5x1, 5x2, 5x3, 5x5, 5x6 - статические моменты масс соответствующих звеньев относительно продольных осей этих звеньев;
5у1, 5У2, 5уз, Sys, Sye - статические моменты масс соответствующих звеньев относительно поперечных осей этих звеньев;
Ji, J2, Js, Js, Je моменты инерции масс соответствующих звеньев относительно точек пересечения продольных и поперечных осей;
т2, ms- массы соответствующих звеньев;
д - угол поворота механизма уравновешивания относительно шарнирного четырехзвенника вокруг шарнира, соединяющего кривошип со стойкой.
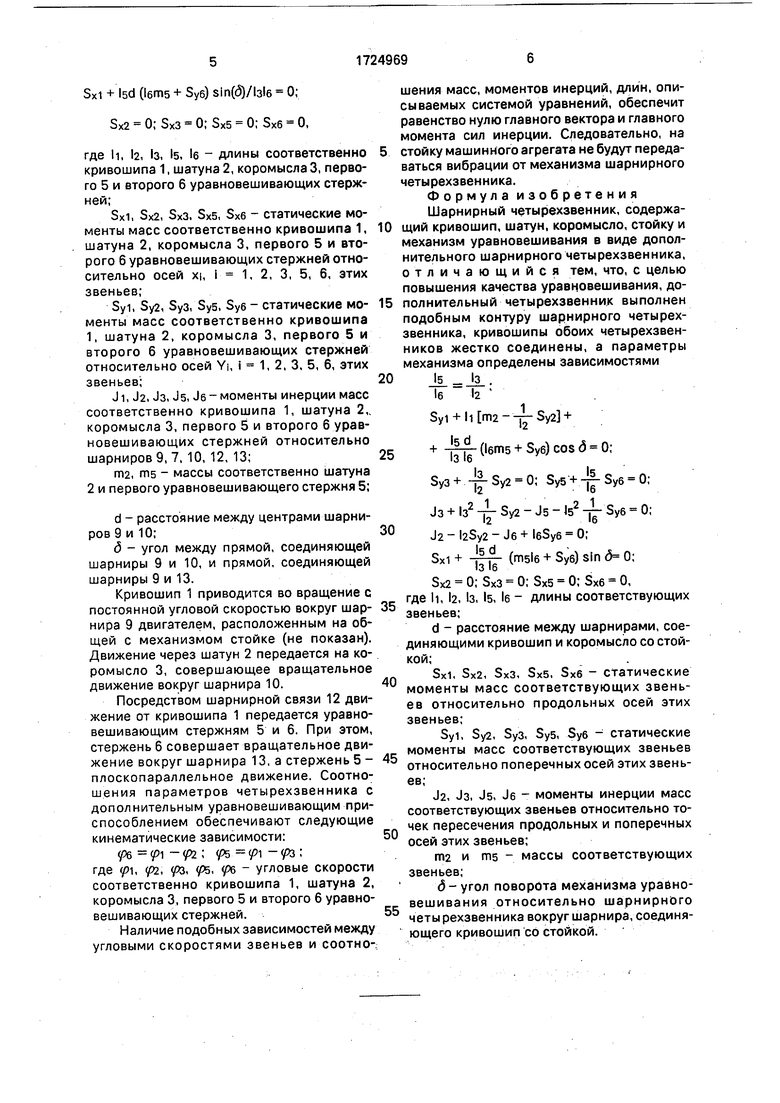
На чертеже приведена схема шарнирного четырехзвенника с предлагаемым уравновешивающим приспособлением.
Шарнирный четырехзвенник состоит из кривошипа 1, шатуна 2, коромысла 3, стойки
4. Кривошип, шатун, коромысло соединены между собой шарнирами 7, 8. Кривошип и коромысло присоединены шарнирно к стойке в точках 9, 10.
Для уравновешивания в четырехзвенник введено уравновешивающее устройство, состоящее из первого 5 и второго 6 стержня, соединенных между собой шарниром 11. Первый стержень 5 прикреплен к
кривошипу шарниром 12, второй стержень 6 прикреплен к стойке шарниром 13. Первый и второй стержни вместе со стойкой и кривошипом образуют четырехсторонний контур, подобный контуру основного четырехзвенника с коэффициентом подобия К, так что выполняются следующие соотношения:
30
Is le Kl2; l7 Kd;le Kli;
где h, I2, з, Is, le - длины соответствующих звеньев;
I - расстояние между шарнирами 9 и 12;
Is- расстояние между шарнирами 9 и 13;
d -расстояние между шарнирами 9 и 10.
Такой контур получается двойным по- воротом контура основного механизма вначале на 180° вокруг биссектрисы угла, образованного прямыми, соединяющими соответственно шарниры 9 и 7, 9 и 10, а затем на угол д вокруг шарнира 9. Угол д мо- жет быть любым и выбирается из конструктивных, соображений.
Распределение масс звеньев механизма осуществлено по следующей системе ал- гебраических уравнений:
Is/le Is/12,1 5уз + 1з5У2/12 0; 5У5 + 1б5Уб/1б 0;
Sy/f И (mi - Sy2/l2) + Isd (lems + 5уе) соз((5)/1з1б 0;
Js + l32Sy2/l2 - Js - ls2Sye/l6 0;
J2 - l2Sy2 - Je + leSye 0;
3x1 + Isd (lems + Зуб) ((5) 0; 3x2 0; Sx3 0; SX5 0; SX6 0,
где h, l2, b, Is, le - длины соответственно кривошипа 1, шатуна 2, коромысла 3, первого 5 и второго 6 уравновешивающих стержней;
5x1, 5x2, 3x3, 5x5, 5Х6 - статические моменты масс соответственно кривошипа 1, шатуна 2, коромысла 3, первого 5 и второго 6 уравновешивающих стержней относительно осей xi, i 1, 2, 3, 5, 6, этих звеньев;
5у1, 5у2, Зуз, 5у5, 5ув - статические мо- менты масс соответственно кривошипа 1, шатуна 2, коромысла 3, первого 5 и второго б уравновешивающих стержней относительно осей YI, 1 1,2, 3, 5, 6, этих звеньев;
J1, J2, Js, Js, Je - моменты инерции масс соответственно кривошипа 1, шатуна 2,, коромысла 3, первого 5 и второго 6 уравновешивающих стержней относительно шарниров 9, 7, 10, 12, 13;
гп2, HIS - массы соответственно шатуна 2 и первого уравновешивающего стержня 5;
d - расстояние между центрами шарниров 9 и 10;
д - угол между прямой, соединяющей шарниры 9 и 10, и прямой, соединяющей шарниры 9 и 13.
Кривошип 1 приводится во вращение с постоянной угловой скоростью вокруг шар- нира 9 двигателем, расположенным на общей с механизмом стойке (не показан). Движение через шатун 2 передается на коромысло 3, совершающее вращательное движение вокруг шарнира 10.
Посредством шарнирной связи 12 движение от кривошипа 1 передается уравновешивающим стержням 5 и 6. При этом, стержень 6 совершает вращательное движение вокруг шарнира 13, а стержень 5плоскопараллельное движение. Соотношения параметров четырехзвенника с дополнительным уравновешивающим приспособлением обеспечивают следующие кинематические зависимости:
р& р - pi; рэ р - рз; где р, р2, рз, Р5, р& - угловые скорости соответственно кривошипа 1, шатуна 2, коромысла 3, первого 5 и второго 6 уравновешивающих стержней.
Наличие подобных зависимостей между угловыми скоростями звеньев и соотношения масс, моментов инерции, длин, описываемых системой уравнений, обеспечит равенство нулю главного вектора и главного момента сил инерции. Следовательно, на стойку машинного агрегата не будут передаваться вибрации от механизма шарнирного четырехзвенника.
Формула изобретения Шарнирный четырехзвенник, содержащий кривошип, шатун, коромысло, стойку и механизм уравновешивания в виде дополнительного шарнирного четырехзвенника, отличающийся тем, что, с целью повышения качества уравновешивания, дополнительный четырехзвенник выполнен подобным контуру шарнирного четырехзвенника, кривошипы обоих четырехзвен- ников жестко соединены, а параметры механизма определены зависимостями le 2
5У1 + h m2 - -Ј- Sy2 +
+ ,5. (lems + Зуб) cos д 0;
Зуз + -jf-Sy2
0; 3У5 + .-j|- Зуб 0;
J3+tf
1
12
5у2 - Js - Is2 -jjp 5У6 0; 0;
J2 125у2 - Je + 1б5уб
5x1 + (rnsle + Sye) sin 6 0;
5x2 0; Зхз 0; 5x5 0; SX6 О, где И, h, з, Is, le - длины соответствующих звеньев;
d - расстояние между шарнирами, соединяющими кривошип и коромысло со стойкой;
3x1, 5x2, 3x3, 3x5, Зхб - статические моменты масс соответствующих звеньев относительно продольных осей этих звеньев;
3У1, Зу2, Зуз, Sys, Зуб - статические моменты масс соответствующих звеньев относительно поперечных осей этих звеньев;
J2, Js, Js, Je - моменты инерции масс соответствующих звеньев относительно точек пересечения продольных и поперечных осей этих звеньев;
ГП2 и ms - массы соответствующих звеньев;
(5-угол поворота механизма уравновешивания относительно шарнирного четы рехзвенника вокруг шарнира, соединяющего кривошип со стойкой.
Редактор И. Ванюшкина Техред М.Моргентал
Корректор О. Кравцова
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравновешенный шарнирный четырехзвенник | 1990 |
|
SU1805253A1 |
| Шарнирный четырехзвенник | 1990 |
|
SU1800170A1 |
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 1994 |
|
RU2087779C1 |
| СДВОЕННЫЙ ПОЛЗУННО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2051303C1 |
| Дезаксиальный кривошипно-ползунный механизм | 1989 |
|
SU1747775A1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| Высадочный автомат | 1989 |
|
SU1701417A1 |
| Вертикальный кривошипный пресс-автомат | 1984 |
|
SU1180275A1 |
| Уравновешенный кривошипно-ползунный механизм | 1988 |
|
SU1627769A1 |
| Привод ножа режущего аппарата | 1990 |
|
SU1794366A1 |
Изобретение относится к машиностроению и может быть использовано для уравновешивания шарнирных четы- рехзвенников. Цель изобретения-повышение качества уравновешивания шарнирного четырехзвенника. Механизм уравновешивания выполнен в виде дополнительного шарнирного четырехзвенника с контуром, подобным контуру шарнирного четырехзвенника. Кривошипы обоих четырехзвен- ников жестко соединены, а параметры механизма связаны определенными зависимостями. 1 ил.
Заказ 1164ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
| Щепетильников В.А | |||
| Уравновешивание механизмов | |||
| - М.: Машиностроение, 1982 | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| Авторское свидетельство СССР №757795, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
