Изобретение относится к обработке металлов давлением и может быть использовано при конструировании кузнечно- прессового оборудования.
Цель изобретения - повышение производительности и надежности автомата за счет увеличения долговечности подшипников в узлах сочленения коромысел со станиной.
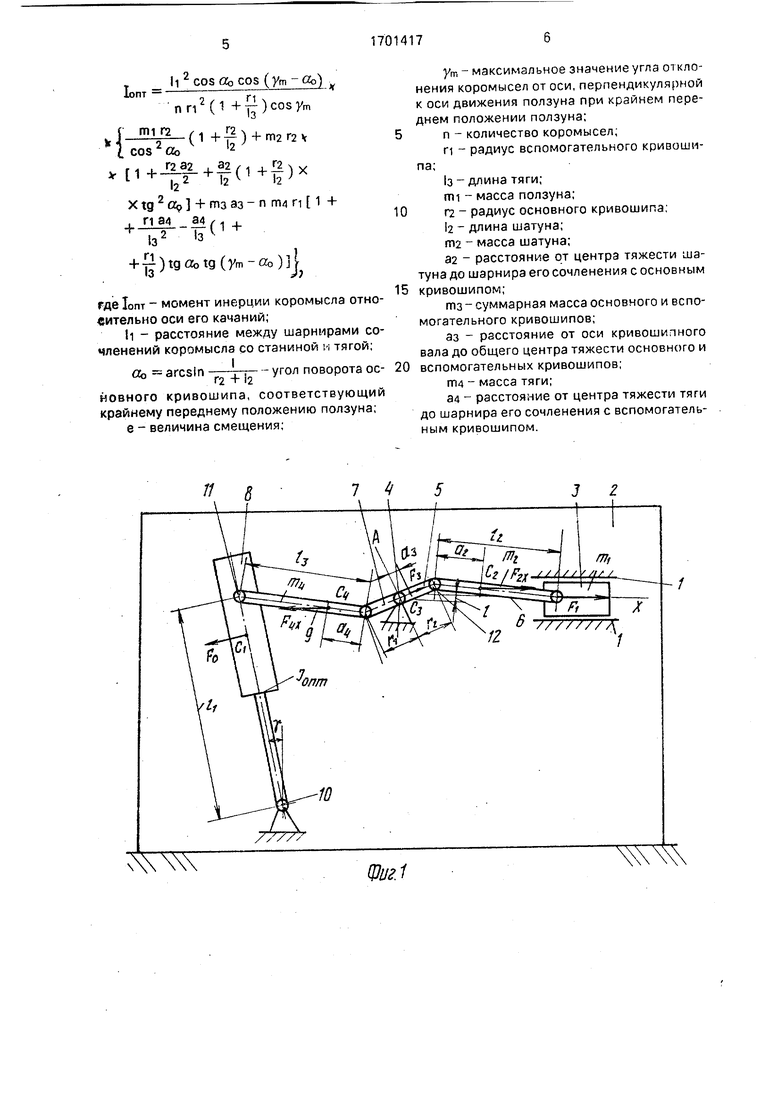
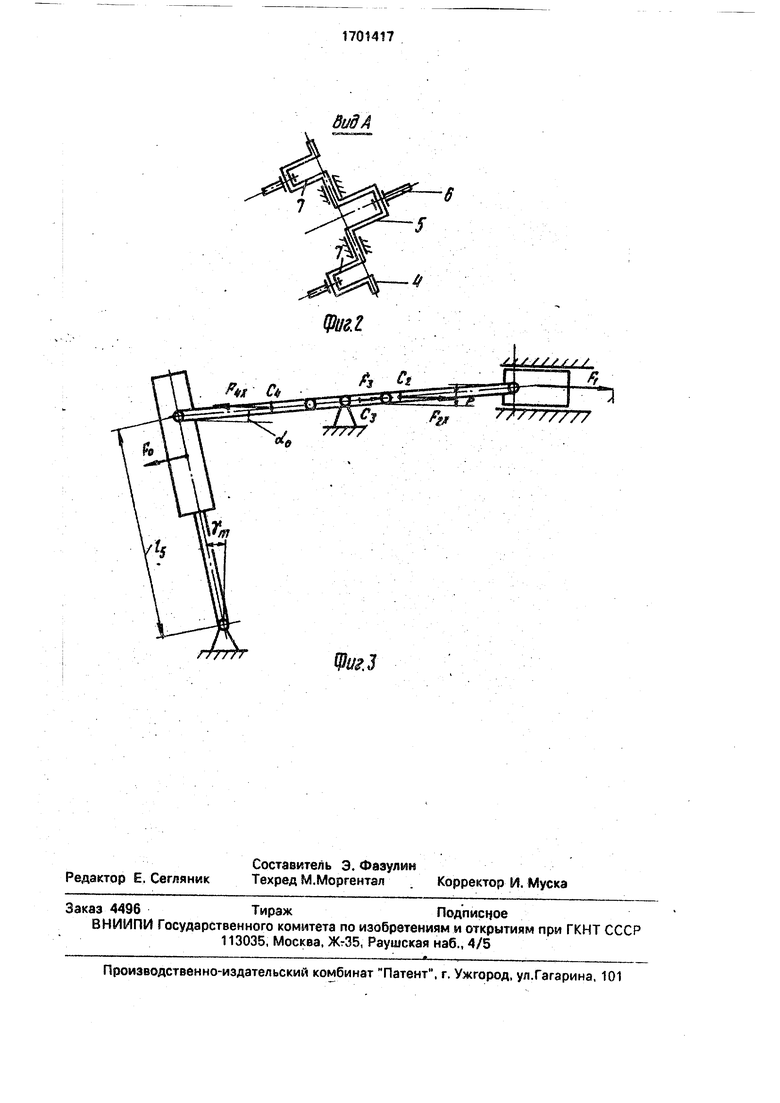
На фиг.1 приведена структурная схема автомата; на фиг.2 - вид А на фиг. 1; на фиг.З - положение звеньев в крайнем переднем положении ползуна.
Автомат содержит размещенный в направляющих 1 станины 2 ползун 3, многокривошипный вал 4 с основным кривошипом 5, связанным посредством шатуна 6 с ползуном 3, и несколькими вспомо- гательнымикривошипами7,
смонтированными в противофазе основному кривошипу 5, шарнирно сочлененные со станиной 2 коромысла 8, связанные тягами 9 с вспомогательными кривошипами 7.
Звенья автомата шарнирно соединены посредством соей 10, 11,12.
Оптимальный момент инерции Тот каждого из п коромысел 8 определяется из условия равенства Нулю при любом положении коромысла 8 составляющей его давления на ось качаний 10, перпендикулярной оси коромысла 8, проходящей через его центр тяжести С и ось 10 его качаний.
Это условие записывается в виде
bnr-Sh,(1)
где S - статический момент массы коромысла 8 относительно оси 10 его качаний.
Величина S определяется из условия полного взаимного уравновешивания инерционных сил, развиваемых звеньями криво- шипно-ползунного и уравновешивающих кривошипно-коромысловых механизмов в положении, соответствующем крайнему переднему положению ползуна, когда составляющие по оси X сил инерции, развиваемых подвижными звеньями механизмов, максимальны по своей величине.
(/
адллл
Это условие уравновешивания в проекциях на ось движения ползуна записывается в виде:
-FoCOS } to+Fi+F2x+F3COS Оо , (2)
1 +r
з
)27TcoS(ym-«) ции, развиваемая коромыслами 8;
- сила инерГ2
Fi - mi окг2(1 +
1
)- сила
2 COS Ob
инерции, развиваемая ползуном 3;
F2x-m2 а 2г2 1+-т г-+тг (1 +
h
12
+ у ) tg 2 аь cos «о- проекция на ось X
силы инерции, развиваемой шатуном 6;
иг аз - сила инерции, развиваемая основным 5 и вспомогательными кривошипами 7;
F4x-nm4 .-Ј (1 +
з 3
+ )tg()tgab cosab- проекция
на ось X силы инерции, развиваемой тягами 9.
Решение уравнения (2) с учетом вычисленных значений FI и подстановка в (1) позволяет получить величину оптимального момента инерции, коромысла,,
ОПТ
h 2COSCtoCOS (ym-Qb)
,:2
п
{
Щ4(1 +)с08Уш
т1Г2 О+ + тггг
l2
rI1+JS« +«(1+)х
1|2 2 12 v h
X tg 2 Ob + тз аз - n nri4 n +
ПЭ4 34 M ,
т ,, и tisz i3 )tgabtg(Xm-Oo)
где 1опт - момент инерции коромысла 8 относительно оси его качаний 10;
d - расстояние между шарнирами 10 и 11 сочленений-коромысла 8 со станиной 2 и тягой 9;
Оо arcsln --т-;угол поворота осГ2 т 12
новного кривошипа 5, соответствующий крайнему переднему положению ползуна 3;
е - величина смещения;
П - радиус вспомогательного кривошипа 7;
mi - масса ползуна 3;
Г2 - радиус основного кривошипа 5;
12 - длина шатуна 6;
гт«2 - масса шатуна 6;
32 - расстояние от центра тяжести С шатуна 6 до шарнира 12 его сочленения с основным кривошипом 5;
тз - суммарная масса основного 5 и вспомогательных кривошипов 7;
аз - расстояние от оси кривошипного вала 4 до общего центра тяжести С основно- го 5 и вспомогательных кривошипов 7;
гщ - масса тяги 9;
84 - расстояние от центра тяжести С тяги 9 до шарнира 13 ее сочленения с вспомогательным кривошипом 7; )з - длина тяги 9;
УП, - максимальное значение угла отклонения коромысел 8 от оси, перпендикулярной оси X движения ползуна 3 при крайнем переднем положении ползу
на 3.
л - количество коромысел 8. Автомат работает следующим образом. При вращении кривошипного вала 4 его 25 основной кривошип 5 посредством шатуна 6 сообщает возвратно-поступательное движение ползуну 3, при рабочем ходе которого производится соответствующая технологическая операция, а вспомогательные криво- 30 шипы 7 посредством тяг 9 сообщают качательные движения коромыслам 8 в каждый момент времени в сторону, противоположную направлению движения ползуна 3, Конструирование высадочных автома- 35 тов с учетом представленной зависимости по определению момента инерции уравновешивающих коромысел позволяет повысить производительность и надежность за счет уменьшения нагруженности узлов со- 40 членения коромысел со станиной.
Формула изобретения Высадочный автомат, содержащий размещенный Б направляющих станины
45 ползун, многокривошипный вал с основным кривошипом, связанным посредством шатуна с ползуном, и вспомогательными кривошипами, смонтированными в проти- вофазе основному кривошипу, шарнирно сочлененные со станиной коромысла, свя50 занные тягами с вспомогательными кривошипами, отличающийся тем. что, с целью повышения производительности и надежности за счет уменьшения нагруженности узлов сочленения коромысел со
55 станиной, момент инерции каждого из коромысел относительно оси его качания определен по зависимости
т И2 COS «о COS (Угл-Оо) 1опт Lпп (1 )cosym ,рн(1.ф + т2Г2Ч
i COS Oo 2
Mn-- Ґ-+fo+f)x
12
X tg 2 Op + тз аз - п ГУМ п 1
34
з
I- ri У - a4 (1 +
1з
+ )tgaotg(ym-ao)3J
где 1опт - момент инерции коромысла относительно оси его качаний;
И - расстояние между шарнирами сочленений коромысла со станиной и тягой;
«b arcsln ,- угол поворота основного кривошипа, соответствующий крайнему переднему положению ползуна; е - величина смещения;
УГГ, - максимальное значение угла отклонения коромысел от оси, перпендикулярной к оси движения ползуна при крайнем переднем положении ползуна; п - количество коромысел;
П - радиус вспомогательного кривошипа;
1з- длина тяги;
mi - масса ползуна; пг - радиус основного кривошипа;
12 - длина шатуна;
гп2 - масса шатуна;
32 - расстояние от центра тяжести шатуна до шарнира его сочленения с основным кривошипом;
тз - суммарная масса основного и вспомогательного кривошипов;
аз - расстояние от оси кривошипного вала до общего центра тяжести основного и вспомогательных кривошипов;
ПРИ - масса тяги;
34 - расстояние от центра тяжести тяги до шарнира его сочленения с вспомогательным кривошипом.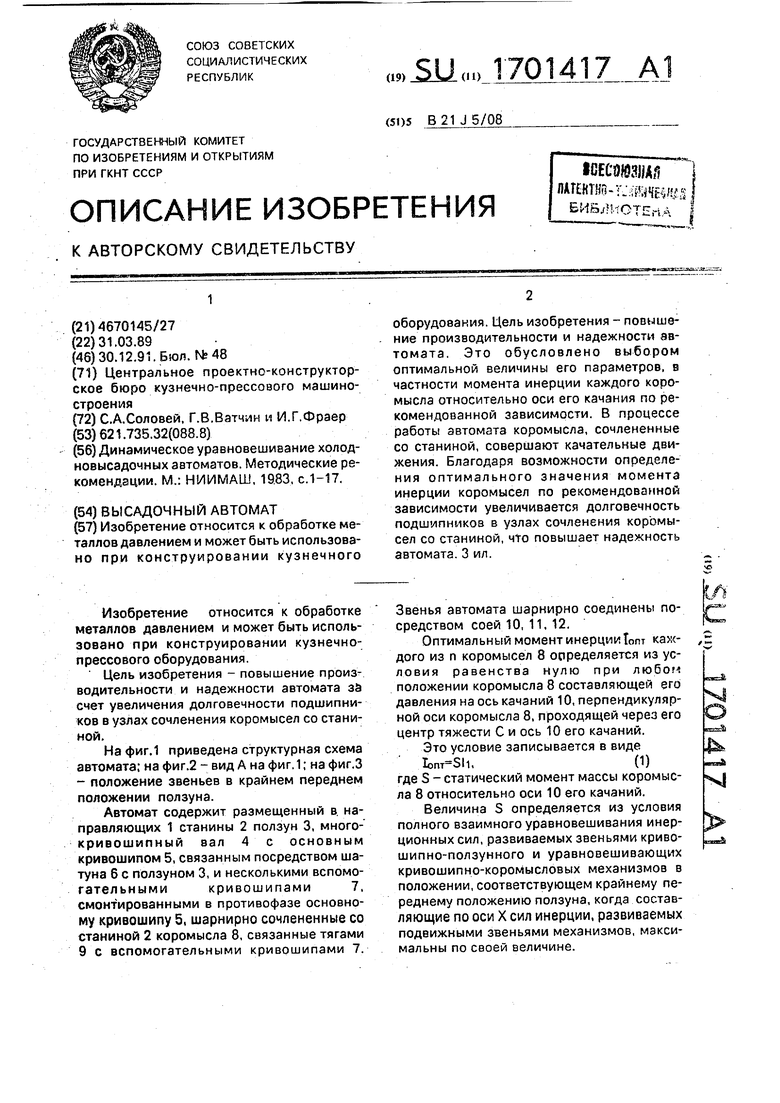

| название | год | авторы | номер документа |
|---|---|---|---|
| Высадочный автомат | 1989 |
|
SU1768346A1 |
| Вертикальный кривошипный пресс-автомат | 1986 |
|
SU1333599A1 |
| Вертикальный кривошипный пресс-автомат | 1984 |
|
SU1180275A1 |
| Пресс-автомат для обработки длинномерного материала | 1987 |
|
SU1442298A1 |
| Вертикальный кривошипный пресс-автомат | 1988 |
|
SU1523398A1 |
| Радиально-обжимная машина | 1982 |
|
SU1118469A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ ПОРШНЕВОЙ МАШИНЫ, В ЧАСТНОСТИ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2510462C2 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2021 |
|
RU2776460C1 |
| Устройство для уравновешивания движущихся масс в локомотивах (тепловозах) | 1929 |
|
SU20676A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2436973C1 |
Изобретение относится к обработке металлов давлением и может быть использовано при конструировании кузнечного оборудования. Цель изобретения - повышение производительности и надежности автомата. Это обусловлено выбором оптимальной величины его параметров, в частности момента инерции каждого коромысла относительно оси его качания по рекомендованной зависимости. В процессе работы автомата коромысла, сочлененные со станиной, совершают качательные движения. Благодаря возможности определения оптимального значения момента инерции коромысел по рекомендованной зависимости увеличивается долговечность подшипников в узлах сочленения коромысел со станиной, что повышает надежность автомата. 3 ил.
v
7 4
Щиг.1
и
| Динамическое уравновешивание холод- новысадочных автоматов | |||
| Методические рекомендации | |||
| М.: НИИМАШ, 1983, с.1-17. |
