Фиг.1
Изобретение относится к машиностроению, а именно к кривошипно-пол- зунным преобразователям вращательного движения в возвратно-поступательное ,. и может быть использовано, в частности в поршневых машинах.
Цель изобретения - повышение надежности и долговечности механизма путем исключения вибрации при его pa- JQ боте.
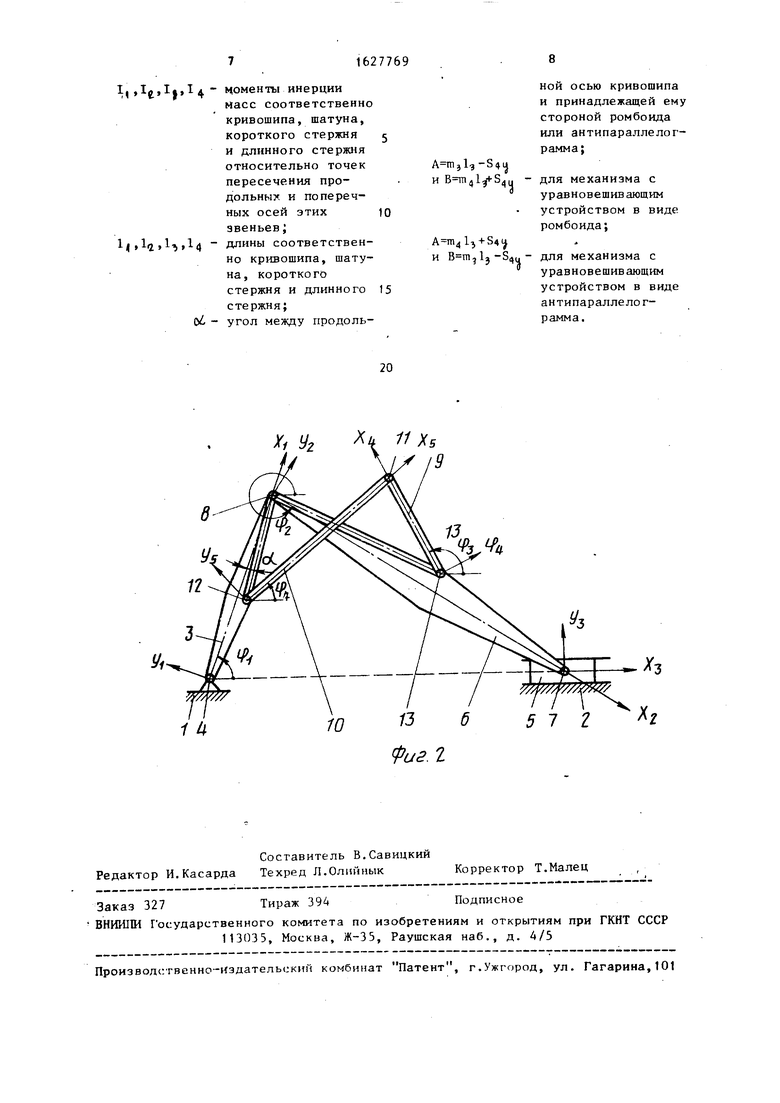
На фиг. 1 показана кинематическая схема механизма с шарнирно-рычажным уравновешивающим устройством в виде ромбоида; на фиг. 2 - то же, с урав- 15 новешивающим устройством в виде антипараллелограмма .
Механизм содержит стойку 1 с прямолинейной направляющей 2, установленный на стойке 1 кривошип 3, евя- 20 занный с ней шарниром 4, установленный в направляющей 2 ползун 5, шатун 6, -одним концом через шарнир 7 связанный с ползуном 5, а другим концом через шарнир b связанный с кривоши- 25 пом 3, и шарнирно-рычажное уравновешивающее устройство в виде короткого и длинного стержней 9 и 10 соответственно, связанных между собой общим шарниром 11. Другим концом стер- зо жень 9 через шарнир 12 связан с кривошипом 3, а стержень 10 через шарнир 13 связан с шатуном 6 (фиг. 1) или другим концом стержень 9 через шарнир 13 связан с шатуном 6, а стержень 10 через шарнир 12 связан с кривошипом 3 (фиг. 2). При этом длина стержня 9 равна расстоянию между шарнирами 8 и
12на кривошипе 3, а длина стержня 10 равна расстоянию между шарнирами 8 и .
13на шатуне 6 так, что в зависимости от расположения общего шарнира 11 стержни 9 и 10 образуют соответствующими отрезками кривошипа 3 и шатуна 6 ромбоид (фиг. 1) или антнпараллелог- ,с рамм (фиг. 2). Длины кривошипа 3, шатуна 6 и стержней 9 и 10 выбирают такими, что отношение длины кривошипа 3 к длине щутуна 6 равно отношению длины стерж- ,« ня 9 к длине стержня 10. Геометри- ческая форма кривошипа 3 и шатуна 6 позволяет сместить шарниры 12 и 13 от продольных осей х и х этих звеньев. При этом продольная ось х кри- вошипа 3 образует угол Об с прямой, соединяющей оси шарниров 8 и 12 и являющейся одной из сторон ромбоида или антипараллелограмма. При проекти35
ровании угол оС может быть выбран в пределах от 0 - 360°.
Параметры геометрии масс звеньев механизма (массы звеньев, моменты инерции масс и статические моменты масс) определены из системы алгебра- ических уравнений
(mj+mg+mj+m),+8,ц-A cosoi 0; S,x- A sinei 0; S2u+ тг1г + В14Г3 cosoi 0;
о;
i S2)f+ В14Ц sin 06
5
0 5 о
с
5
o;
°ty °4X аЖ ЧХ
S ЈU+ 14 1 j 0,
I, + (m,+m1+m,+m4) 1 (+m} (S4,.- )21, cos Oi - I, O; I4 + m2l + m4lj - I4 0,
где m.,m ,т,т4 массы соответственно шатуна, ползуна, короткого стержня и длинного стержня; SU .
54д, 55д - статические моменты масс соответственно кривошипа, шатуна, ползуна, короткого стержня и длинного стержня относительно продольных осей этих звеньев;
,lj-S,
- для механизма на фиг. 1;
+ S4(j,
для механизма на
%,8П,8, V Ч
1,,1г, I.,I4
фиг. 2;
-статические моменты масс соответственно кривошипа, шатуна, ползуна, короткого стержня и длинного стержня относительно поперечных осей этих звеньев;
-моменты инерции масс соответственно кривошипа, шатуна, короткого стержня и длинного стержня относительно точек пересечения продольных и поперечных осей
Ь
этих звеньев (шарниров А,8,12 и 13);
21Г +
10
20
25
- длины соответственно кривошипа, шатуна, короткого стержня и длинного стержня; 06 - угол между продольной осью кривошипа и принадлежащей ему стороной ромбоида или антипараллелограмма.
При проектировании механизма конструктивно задают значение любых семи из восемнадцати параметров геометрии масс, входящих в систему уравнений.
Механизм работает следующим образом.
Вращение кривошипа 3 через шатун 6 преобразуется в возвратно-поступательное движение ползуна Ъ и движение по шатунным кривым стержней 9 и 10. При этом диагонали ромбоида или антипараллелограмма совершают поступательное движение, шарниры 12 и 13 движутся относительно своей диагонали во взаимно противоположных направлениях, а равные по длине .стороны ромбоида или антипараллелограмма поворачиваются навстречу друг другу. Вследствие этого угловая скорость стержня 9 равна и противоположна угловой скорости кривошипа 3, а угловая скорость стержня 10 равна и противоположна угловой скорости шатуна 6
Из фиг. 1 очевидно, чтоСр3
+tf-U, , 4 м - -Ч г а из ИГ« 2 очевидно, что lfj ,Lp4 2fi +(-(JL. Дифференцируя эти зависимости по времени, в обоих случаях получают (0} -СО,, У4 J4.45
Следовательно, в выполненном по предлагаемым схемам механизме обеспечивается равенство нулю главного вектора и главного момента сил инер- ции звеньев механизма при любом зако- 50 не вращения кривошипа, т.е. обеспечивается полная уравновешенность механизма при любых условиях и режимах его работы.
jj
30
35
40
Формула изобретения
Уравновешенный кривошипно-ползун- ный механизм, содержащий стойку с
прямолинейной направляющей, установленный на стойке кривошип, установленный в направляющий ползун, шатун, шарнирно связанный своими концами с кривошипом и ползуном, и шарнирно-ры- чажное уравновешивающее устройство в виде двух стержней разной длины, одними концами через общий шарнир связанных между собой, а другими концами шарнирно связанных короткий - с кривошипом, а длинный - с шатуном, при этом отношение длин короткого и длинного стержней равно отношению j длин кривошипа и шатуна, отличающийся тем, что, с целью повышения надежности и долговечности, стержни образуют с кривошипом и шатуном ромбоид или антипараллелограмм, а параметры масс звеньев механизма определены уравнениями
m,+m2- m3+m4)l;)+S(u-A cosoi 0;
s«L5(nO(,
0;
Sju+ гаг1г+в141 со5( ° S2X+ В14Ц sincxi 0;
0
5
S,jЭЛХ
0;
Sju 1.4 1
°fX
5 - 0;
12
I dnj+n -Hnj+m) 1, -Hnji j(S4,.-mjl,)21 cosod -13 0; - I4 0.
4
mt12+ra414
где .т.т - массы соответственно шатуна, ползуна, короткого стержня и длинного стержня;
45
50
40
5
S|X S2r
4
Sf
(}. «Г Ъ
статические моменты масс соответственно кривошипа, шатуна, ползуна, короткого стержня и длинного стержня относительно продольных осех этих звеньев,
статические моменты масс соответственно кривошипа, шатуна, ползуна, короткого стержня и длинного стержня относительно поперечных осех этих звеньев;
, ,Ј,.,I - моменты инерции
масс соответственно кривошипа, шатуна, короткого стержня 5 и длинного стержня относительно точек пересечения продольны и поперечных осей этих ю звеньев;
| ,1 , Ц ,1ц - длины соответственно кривошипа, шатуна, короткого стержня и длинного 15 стержня; О - угол между продольm jig -SijiJ ,,lj
ной осью кривошипа и принадлежащей ему стороной ромбоида или антипараллелограмма;
- для механизма с уравновешивающим устройством в виде ромбоида;
m44 + S41}
.jlj-S i. для механизма с уравновешивающим устройством в виде антипараллелограмма.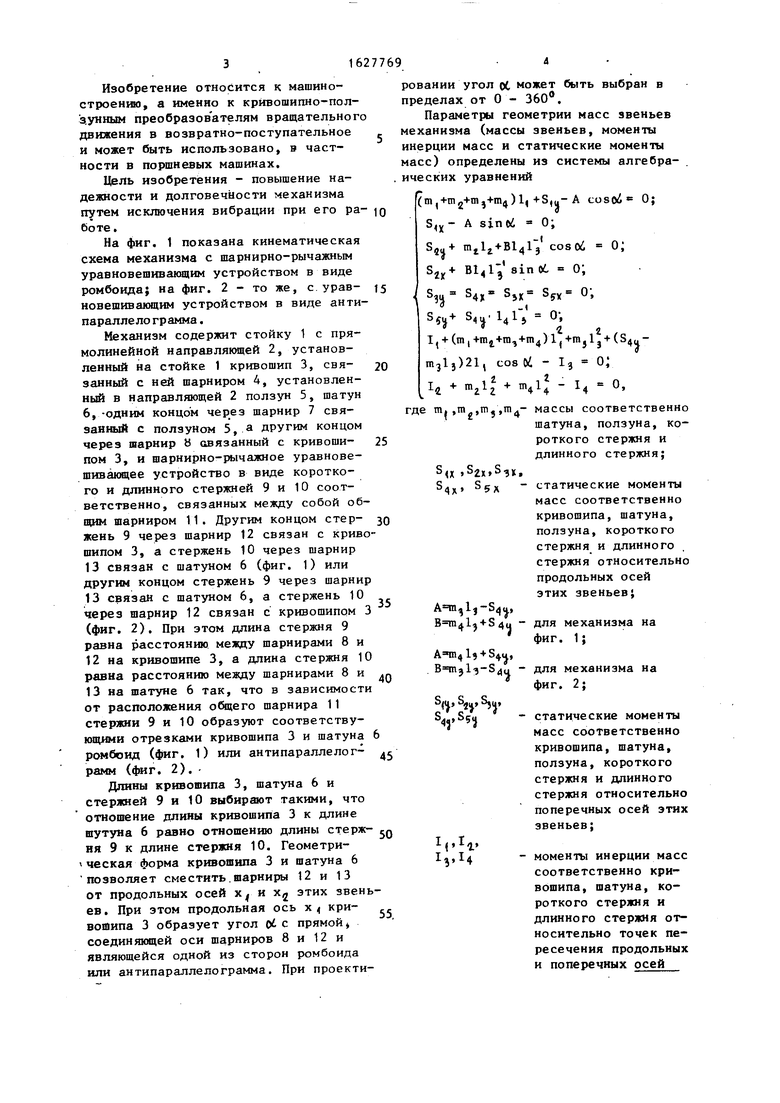
| название | год | авторы | номер документа |
|---|---|---|---|
| Дезаксиальный кривошипно-ползунный механизм | 1989 |
|
SU1747775A1 |
| Шарнирный четырехзвенник | 1990 |
|
SU1800170A1 |
| СИММЕТРИЧНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА | 2014 |
|
RU2568159C2 |
| ЗУБЧАТО-РЫЧАЖНЫЙ МЕХАНИЗМ С ПЕРИОДИЧЕСКИМИ ОСТАНОВКАМИ В.И. ПОЖБЕЛКО | 2003 |
|
RU2252350C1 |
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 1994 |
|
RU2087779C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| СДВОЕННЫЙ ПОЛЗУННО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2051303C1 |
| Шарнирный четырехзвенник | 1989 |
|
SU1724969A1 |
| Механизм Мамырина для воспроизведения кривой Штейнера | 1986 |
|
SU1391966A1 |
| ШАРНИРНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 2020 |
|
RU2740526C1 |
Изобретение относится к криво- шипно-ползунным преобразователям нра- щателыюго движения в вознратно-поступательное и найдет применение в частности в поршневых машинах. Цель изобретения - повышение надежности и долговечности механизма путем исключения вибрации при его работе. Вращение кривошипа 3 через шатун 6 преобразуется в возвратно-поступательное движение ползуна 5 и движение по шатунным кривым стержней 9 и 10 шарнир- но-рычажного уравновешивающего устройства. Угловые скорости стержней 9 и 10 всегда равны и противоположны соответственно угловым скоростям кривошипа 3 и шатуна 6. Поэтому главный вектор и главный момент сип инерции звеньев механизма равны нулю при любом законе вращения кривошипа. 2 ил. (Л с У & to vj о to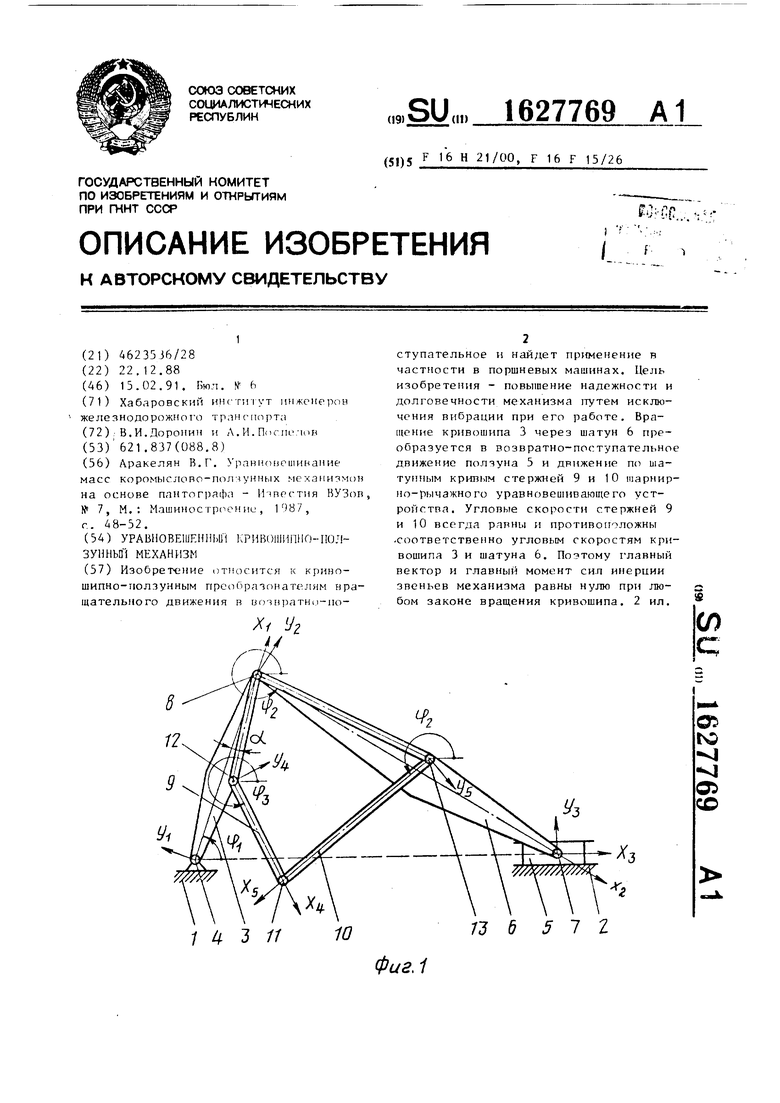
Ъ У-.
в
Ч 11 Х5
13 6
Фиг. I
ГГТч У
512 г
| Лракелян В.Г | |||
| Уравновешивание масс коромыслово-поллунных механизмов на основе пантографа - Известия ВУЗов, № 7, М | |||
| : Машиностроении, ГЖ7, г | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
