Изобретение относится к области станкастроения и контрольно-и 31мерительной техники, преимущественно для центрирования растipOBHx масштабов делительных столов, делительных машин и приборов измерения вых перемеш;ений.
По известному способу центрирования крутовых растров, один из которых-измерительный, а другой-индикаторный, п-ро-пускают световой поток через эти растры. При шалейшем сдвиге одного растр а относительно другого в направлении, перпендикулярнам к линиатуре полос, сильно изменяется интенсивность светового потока, про-ходящего через эту систбМу.
Недостатком такого опособа является то, что он позволяет центрировать только при па. раллельной линиатуре двух |растров и не позволяет центрировать в тех случаях, «огда угол поворота одного растра относительно другого составляет дробное число шагов, и исключает центрирование во время поворота измерительного pacTipa.
Кроме того, известный снособ не позволяет автоматизировать процесс центрирования, так как срав-нение сигналов, пропорциональных световому потоку, не может обеспечить ни стабильности, ни точности из-за непостоянства этих сигналов во времени.
Предлагаемый сп;особ отличается от известного ТИМ, что, с целью обеспечения центрирования растров как п|ри параллельной, так и при непараллельной линиатуре, а также с целью авто-матизации центрирования, формируют два измерительных сигнала, соответствующих расположенным под прямым углом: один к другоМу,участкам растров, формируют суммарный сигнал, соответствующий пропусканию светового етотока через все элементы индикаторного и измерительного растров, затем перемещают измерительный растр ПО двум взаимно перпендикулярным осям относительно индикаторного растра до совпадения фаз двух измерительных сигналов и суммарного сигнала.
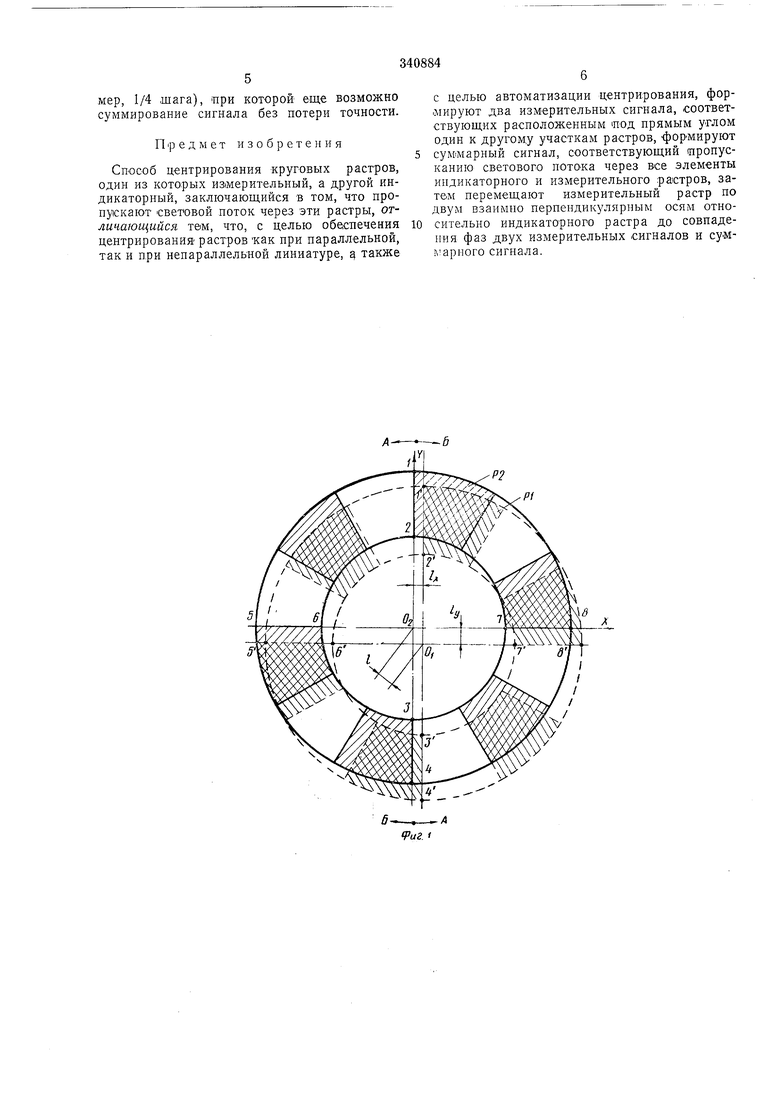
На фиг. 1 изображены два круговых радиальных р-астра, расположенные один относительно другого с эксцентриситетов ; на фиг. 2 показана форма сигналов, соответствующих изменения светового потока в разных областях растров при условии сканирования одного из растров; на фиг. 3-сигналы, по которым производится определение эксцентриситета.
Через растры (см. фиг. 1) проходит световой ПОТОК. При этом .растр PI (на чертеже показаи пунктирной линией) является измерительным и условно не1подвижным, а растр PZ (на чертеже показан сплошной линией) является индикаторным и совершает возвратнопоступательное сканирование вокруг оси Oz относительно растра PI. Для простоты линиатура полос обоих .растров изображена параллельной, чему соответствует условие параллельности линий 1-2-3-4 и 1-2-3-4, а также линий 5-6-7-8 и 5-6-7-8. Колебания растра можно представить как движение (поворот на некоторый угол) в прямом направлении А и затем в обратном Б (см. фиг. 1). На диаrpaiMMe (см. фиг. 2а), изОбражающей зависимость углового перемещения растра от времени, этому соответствуют положительные и отрицательные полупериоды кривой (синусоиды) .
Максимум пропускания растров (максимальный световой поток через растры) в области, охватывающей точки 3, 4, З и. , возникнет при движении растра Ра в направлении А (см. фиг. 2в), поскольку центр 02 растра PZ смещен относительно центра Oi растра PI в направлении Б на величину /х, представляющую собой составляющую эксцентриситета ПО оси К, а макси1мальное пропускание (просветление) растров наступает в момент сечения линии 3-4 липией 5-4 штрихов растров (см. 1фиг. 1). В полупе1ри0де сканирования Б (см. фиг. 1, 2) эти линии не пересекаются и положительного пика светового потока не возникает. Световой потОК, превращаемый с помощью светочувствительных элементов в электрический сигнал и соответствующий участкам растров, расположенных под определенным углом, представляет измерительный сигнал, изменения которого соответствуют и1зменения1м светового потока. ИЗ|Мерительный сигнал в областях, охватывающих точки /, 2, 1 н2 - 5, 6, 5 и 6, а также 7, 8, 7 и 8 будет формироваться таким же образом и этому будут соответствовать временные диаграммы (см. фиг. 2в, фиг. 2г и фиг. 2д). При этом составляющим эксцентриситета /х и /у (ом. фиг. 1) соответствуют временные интервалы tx и /у (см. фиг. 1 и фиг. 2), определяемые нулевой фазой колебаний сканирующего растра и пиками измерительных сигналов. Причем, для диаметрально противоположных областей, папример, для областей Л 2,1 2 - 3, 4, 3 и 4 эта разность фаз будет иметь одинаковую величину и разные знаки (см. фиг. 2в и 26). Для областей, расположенных под углом 90°, например, для областей- 3, 4, 3 и 4 - 5, 6, 5 и 6 фаза будет одинаковой, т. е. только при условии /х /уУсловие равенства нулю составляющих эксцентриситета () выполняется при и у-0; это означает, что при отсутствии эксцентриситета и при параллельной линиатуре полос пики измерительного сигнала совпадают с нулевой фазой колебаний скани|рующего растра. Отсюда вытекает, что центрирование можно производить, совмещая фазу пиков двух измерительных сигналов, соответствующих участкам растров, расположенных под углом 90°, с нулевой фазой скани,рующего индикаторного растра. В кагаестве опорного сигнала наиболее выгодно использовать суммарный сигнал, получаемый пропусканием светового потока через всю площадь обоих 5 растров и являющийся результатом взаимодействия всех элементов растров. В этом случае, при достаточно большом количестве полос, исключается влияние эксцентриситета, т. е. фаза пиков суммарного сигнала совпадает (при параллельной линиатуре полос) с нулевой фазой колебаний сканирующего растра. Более того, положение пиков суммарного сигнала всегда, ори любам угле между линиатурами растров, т. е. три любом угле иоворо5 та измерительного растра относительно сканирующего индикаторного растра, будет соответствовать отсутствию эксцентриситета, а это означает, что эксцентриситет будет равен нулю при любом угле, в том числе и дробном,
0 если фаза пиков измерительных и суммарных сигналов совпадает. Разница только в том, что при дробном угле поворота иЗимерительного растра пики суммарного сигнала не будут совпадать с нулевой фазой колебаний
5 сканирующего растра. Временное соотношение фаз соответствующих измерительных и суммарного сигналов дает возможность определить знак сигнала ощибки. Поэтому, при наличии суммарного сигналя последовательность операций центрирования будет следующей.
При УСЛОВИЕ сканирования индикаторного растра (С(М. фиг. За) формируют два измерительных сигнала, соответствующих участкам
5 растров, расположенных лод углами 90° (ом. фиг. Зв и Зг), затем формируют суммарный сигнал (см. фиг. 36), затем в моменты, соответствующие пикам сигналов, формируют импульсы (см. фиг. Зд, Зе, Зж), затем сравнивают фазы измерительных импульсов (см. фиг. Зе и Зж) с фазой импульсов суммарного сигнала (см. фиг. Зд) и вырабатывают сигналы ошибки, величина и знак которых соответствует величине и знаку составляющих эксцентриситета, с помощью которых управляют приводами, перемещающими измерительный растр относительно индикаторного по двум перпендикулярным друг другу осям X и Y, и при этом следят за фазой измерительных импульсов, в момент совпадения которых с импульсами суммарного сигнала пе(ремещечие измерительного растра прекращают.
Поскольку предлагаемый способ позволяет следить за эксцентриситетом при любом угле
5 поворота измерительного растра, то это дает возможность устранять эксцентриситет во время разворота, например, делительного стола. Кроме того, нредлагаемый способ позволяет совместить в одном устройстве точный угловой
0 датчик и датчик эксцентриситета, не усложняя его значительно.
мер, 1/4 шага), при которой еще возможно суммирование сигнала без потери точности.
П ip е д м е т изобретения
Способ центрирования круговых растров, один из которых измерительный, а другой индикаторный, заключающийся в том, что пропускают световой поток через эти растры, отличающийся тем, что, с целью обе|СБечения центрирования растров как при параллельной, так и при непараллельной линиатуре, также
с целью автоматизации центрирования, формируют два измерительных сигнала, соответствующих расположенным под прямым углом один к другому участкам растров, формируют суммарный сигнал, соответствующий пропусканию светового нотОКа через все элементы индикаторного и измерительного растров, затем перемещают измерительный растр по двум взаимно перпендикулярным осям относительно индикаторного растра до совпадения фаз двух измерительных сигналов и сум apнoгo сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фазоимпульсный преобразователь угловых перемещений | 1975 |
|
SU954821A1 |
| Способ центрирования двух независимо вращающихся круговых растров | 1990 |
|
SU1747884A1 |
| УСТРОЙСТВО для ИНТЕРПОЛИРОВАНИЯ РАСТРОВОГО ШАГА | 1973 |
|
SU406114A1 |
| Способ измерения перемещений | 1973 |
|
SU486216A1 |
| Оптический растровый датчик | 1980 |
|
SU949501A1 |
| Способ измерения перемещения растрового преобразователя | 1985 |
|
SU1244485A1 |
| Фотоэлектрический преобразователь перемещений | 1980 |
|
SU1089411A2 |
| Эталон единицы плоского угла | 2016 |
|
RU2637727C1 |
| Фотоэлектрический преобразователь угловых перемещений | 1977 |
|
SU696280A1 |
| ФОТОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ДВУХ ЧАСТЕЙ МЕХАНИЗМА | 1971 |
|
SU434256A1 |

Р2
Pi
