Изобретение относится к области измерительной техники, в частности к гелиотехнике, И может быть использовано для сборки поверхностей отражающих электромагнитные волны с различными длинами волн.
Известны устройства для формирования поверхностей, к которым относятся различного рода шаблоны, собираемые и выверяемые под профиль формируемой поверхности,
К недостаткам таких устройств относятся высокая точность изготовления ножа шаблона или направляющей, сложность юстировки и подготовки шаблона к процессу сборки поверхности, ограничение возможности использования шаблона за счет работы только при отвесной ориентировке его оси вращения.
Наиболее близким к предлагаемому для сборки только плоских поверхностей контактным способом является устройство с тремя опорными (контактными) точками и уровнями.
Недостатком прототипа является малая область применения за счет сборки только горизонтальных, плоских поверхностей.
Кроме того, он позволяет устанавливать плоские одиночные элементы собираемой поверхности параллельно друг другу с высокой (порядка 0,2-0,3) точностью, тогда как несовпадение отдельного элемента с собираемой плоскостью может составлять 0,5- 2,0 мм.
Целью изобретения является расширение функциональных возможностей путем создания поверхностей с кривизной второго порядка.
Сущность заявленного решения состоит в замене измерений от референтных параллельных плоскостей, задаваемых двумя взаимоперпендикулярными на проектирование измерения относительно полюса. Эта замена позволяет формировать как плоские поверхности, так и криволинейные, при этом любом расположении. Принципиально задача сводится к вычислению расстояний между точкой полюса и точками проектной собираемой поверхности, координаты которых заданы в единой пространственной системе. Для однозначного ориентирования элемента собираемой поверхности необходимо его установить таким образом, чтобы расстояния по крайней мере от трех симметричных точек элемента до точки полюса были равны расчетным. При больших размерах элемента собирается расчетная поверхность и соблюдается его ориентировка.
0
0
На фиг. 1 изображено заявляемое устройство; на фиг. 2 - то же, с использованием координат.
Устройство состоит из жесткой плоскости пластины 1, трех опор 2 постоянной длины (от верхней плоскости пластины до наиболее удаленной сферической контактной поверхности опор 2, прикрепленных перпендикулярно пластине 1), трех приливов 3, в которых выполнены отверстия А. Соосно отверстиям 4 установлены три пружинных динамометра 5 сжатия. К пластине 1 по оси опор 2 прикреплены на проволоках
5 6 три одинаковых узла 7 зажима полотен 8 металлических рулеток 9. При натянутых за свободные концы зажимов 8 проволоках 6 расстояния между основаниями проволок 6 и свободными концами зажимов 7 должны быть одинаковы и равны 10-15 см. На пластине 1, на биссектрисах равностороннего треугольника, образованного основаниями проволок 6, прикреплены три ленточных или пружинных зажима 10 для установки в них
5 корпусов рулеток 9. Концы полотен 8 рулеток 9 пропускаются через узлы 7 зажима и скрепляются с тремя инварными проволоками 11 одинаковой длины, свободные концы которых собраны в узел 12, находящейся на поверхности шаровой опоры, К пластине прикреплены два взаимно перпендикулярных уровня 13 и дополнительные опоры 14 изменяющейся длины. Опоры 14 установлены между опорами 2 в вершинах одинаковых равносторонних треугольников, стороны которых определяются по размерам и форме элемента собираемой поверх1- ности, Расстояние между опорами 2 и центрами отверстий 4 также определяется по размерам и форме элемента собираемой поверхности. Например, если форма элемента - правильный шестиугольник с длиной стороны S, то сторона D треугольника равна S V3 + L, где L - величина зазора между элементами. При этом расстояние между опорами 2 и центрами отверстия 4 ±
-JT
Отверстия 4 используются для закрепления устройства посредством трех винтовых пар на каркасе собираемой поверхности, а динамометры 5 - для задания одинакового натяженил проволок 6, зажимов 7, полотен 8 рулеток и проволрк 11. 5 Дополнительные опоры 14 переменной длины имеют такие же сферические контактные поверхности, как и у опор 2.
Таким образом, предложенное устройство позволяет формировать математически определенную поверхность путем изменения длин дополнительных опор 14,
0
5
0
5
0
равно S +
или пользуясь прямоугольными координатами всех опор, которое легко вычисляются по расстояниям между опорами и отверсти- ями 4 и ориентировке линий расположения опор относительно выбранного направления одной из координатных осей.
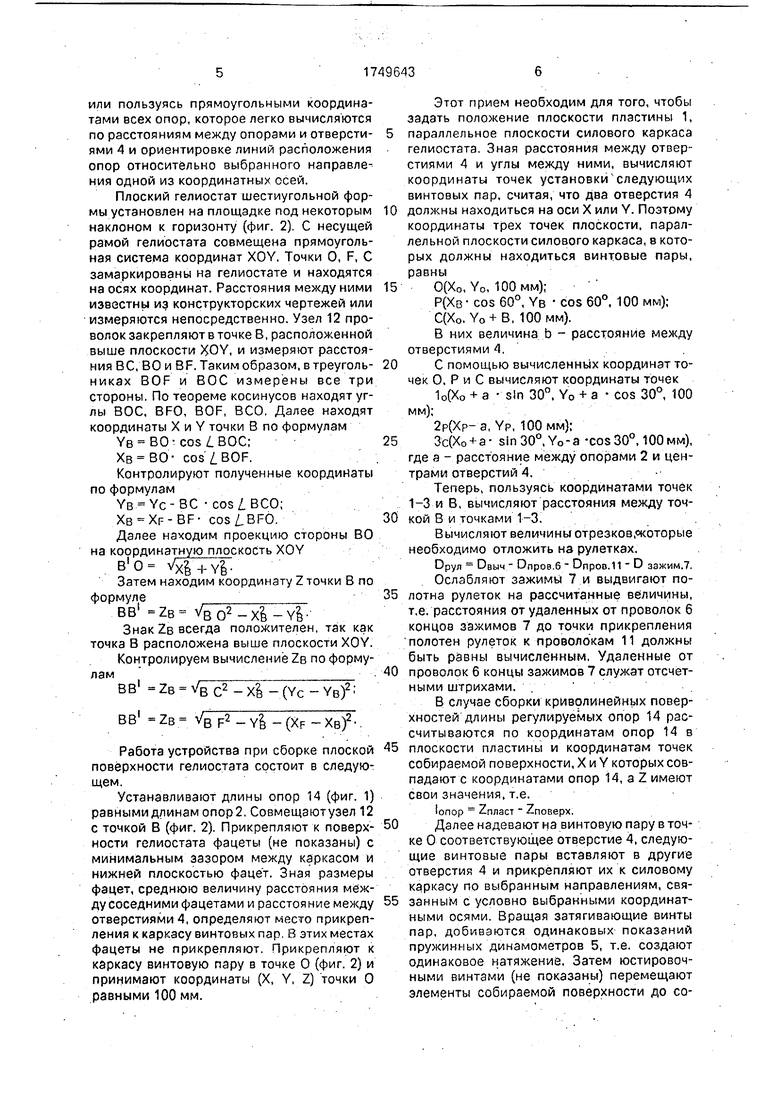
Плоский гелиостат шестиугольной формы установлен на площадке под некоторым наклоном к горизонту (фиг. 2). С несущей рамой гелиостата совмещена прямоугольная система координат XOY, Точки О, F, С замаркированы на гелиостате и находятся на осях координат. Расстояния между ними известны из конструкторских чертежей или измеряются непосредственно. Узел 12 проволок закрепляют в точке В, расположенной выше плоскости XOY, и измеряют расстояния ВС, ВО и BF. Таким образом, в треуголь- никах BOF и ВОС измерены все три стороны. По теореме косинусов находят углы ВОС. BFO, BOF, BCO. Далее находят координаты X и Y точки В по формулам
YB BO-cosZ BOC;
Хв ВО- cos /.BOF.
Контролируют полученные координаты по формулам
YB Yc-BC cos/. BCO;
XB XF-BF- cos/,BFO.
Далее находим проекцию стороны ВО на координатную плоскость XOY
В О- VX&+Y&Затем находим координату Z точки В по формуле
ВВ1 ZB VB02-XB-YB Знак ZB всегда положителен, так как точка В расположена выше плоскости XOY. Контролируем вычисление ZB по форму
лам
вв1 ZB VBc2 - хв - (YC - YB)2 1 ZB ()2.
вв
Работа устройства при сборке плоской поверхности гелиостата состоит в следующем.
Устанавливают длины опор 14 (фиг. 1) равными длинам опор 2. Совмещаютузел 12 с точкой В (фиг. 2). Прикрепляют к поверх- ности гелиостата фацеты (не показаны) с минимальным зазором между каркасом и нижней плоскостью фацет. Зная размеры фацет, среднюю величину расстояния между соседними фацетами и расстоя ние между отверстиями 4, определяют место прикрепления к каркасу винтовых пар. В этих местах фацеты не прикрепляют. Прикрепляют к каркасу винтовую пару в точке О (фиг. 2) и принимают координаты (X, Y, Z) точки О равными 100мм.
0 5 0
5
0
5
0
5
0 5
Этот прием необходим для того, чтобы задать положение плоскости пластины 1, параллельное плоскости силового каркаса гелиостата. Зная расстояния между отверстиями 4 и углы между ними, вычисляют координаты точек установки следующих винтовых пар, считая, что два отверстия 4 должны находиться на оси X или Y. Поэтому координаты трех точек плоскости, параллельной плоскости силового каркаса, в которых должны находиться винтовые пары, равны
0(Х0, Yo, 100мм);
Р(Хв cos 60°, YB cos 60°. 100 мм);
С(Х0. Yo+B, 100мм).
В них величина b - расстояние между отверстиями 4.
С помощью вычисленных координат точек О. Р и С вычисляют координаты точек
1о(Х0 + а sin 30°, Yo + a cos 30°, 100 мм);
2р(Хр-а, YP, 100мм);
Зс(Х0 + а- sin30°,Y0-a -cos 30°, 100мм), где а - расстояние между опорами 2 и центрами отверстий 4.
Теперь, пользуясь координатами точек 1-3 и В, вычисляют расстояния между точкой В и точками 1-3.
Вычисляют величины отрезковжоторые необходимо отложить нз рулетках,
Орул Овыч - Dnpoe.6 - Dnpoo.11 - D зэжим.7.
Ослабляют зажимы 7 и выдвигают полотна рулеток на рассчитанные величины, т.е. расстояния от удаленных от проволок 6 концов зажимов 7 до точки прикрепления полотен рулеток к проволокам 11 должны быть равны вычисленным, Удаленные от проволок б концы зажимов 7 служат отсчет- ными штрихами.
В случае сборки криволинейных поверхностей длины регулируемых опор 14 рассчитываются по координатам опор 14 в плоскости пластины и координатам точек собираемой поверхности, X и Y которых совпадают с координатами опор 14, a Z имеют свои значения, т.е.
lonop Znnact ZnoBepx.
Далее надевают на винтовую пару в точке О соответствующее отверстие 4. следующие винтовые пары вставляют в другие отверстия 4 и прикрепляют их к силовому каркасу по выбранным направлениям, связанным с условно выбранными координатными осями. Вращая затягивающие винты пар, добиваются одинаковых показаний пружинных динамометров 5, т.е. создают одинаковое натяжение. Затем юстировоч- ными винтами (не показаны) перемещают элементы собираемой поверхности до соприкосновения с опорами 2 и 14 пластины 1. Момент контакта с опорами 2 и 14 может быть зафиксирован визуально, а также с помощью различных контактных приспособлений, прикрепленных к опорам.
Точность ориентирования зависит от размера (базы) R устройства, которую можно вычислить по формуле mo j|
ГОорR
Если средняя квадратическая погрешность отложения линейных размеров от точки 12 до пластины 1 то 0,3 мм, то при т0р 400. 500, 600, 1000 мм точность ориентирования элемента собираемой поверхности соответственно равна пл0р 2,6 ; 2.0 ; 1.7 : 1,0.
Формула изобретения Устройство для сборки поверхности гелиостата, содержащее основание в форме равностороннего треугольника с тремя перпендикулярными опорами, расположенными в вершинах последнего и имеющими постоянную длину, отличающееся тем,
что, с целью расширения функциональных возможностей путем создания поверхностей с кривизной второго порядка, основание дополнительно снабжено
перпендикулярными штырями регулируемой длины, размещенными в вершинах, по- добных основанию в треугольниках, последние выполнены с приливами, имеющими отверстия, и снабжены динамометрами, установленными в отверстиях соосно им, в точках фиксации опор на основании закреплены одним концом гибкие струны, имеющие измерители длины, выполненные в виде двух концевых мер и расположенного
между ними мерного тела со шкалой, причем свободные концы струн соединены вместе с возможностью растяжения струн, а одна из концевых мер измерителей прикреплена к основанию и снабжена зажимом, через который пропущено с возможностью перемещения гибкое мерное тело, при этом начальный штрих шкалы соединен с другой концевой мерой и через него - со струной.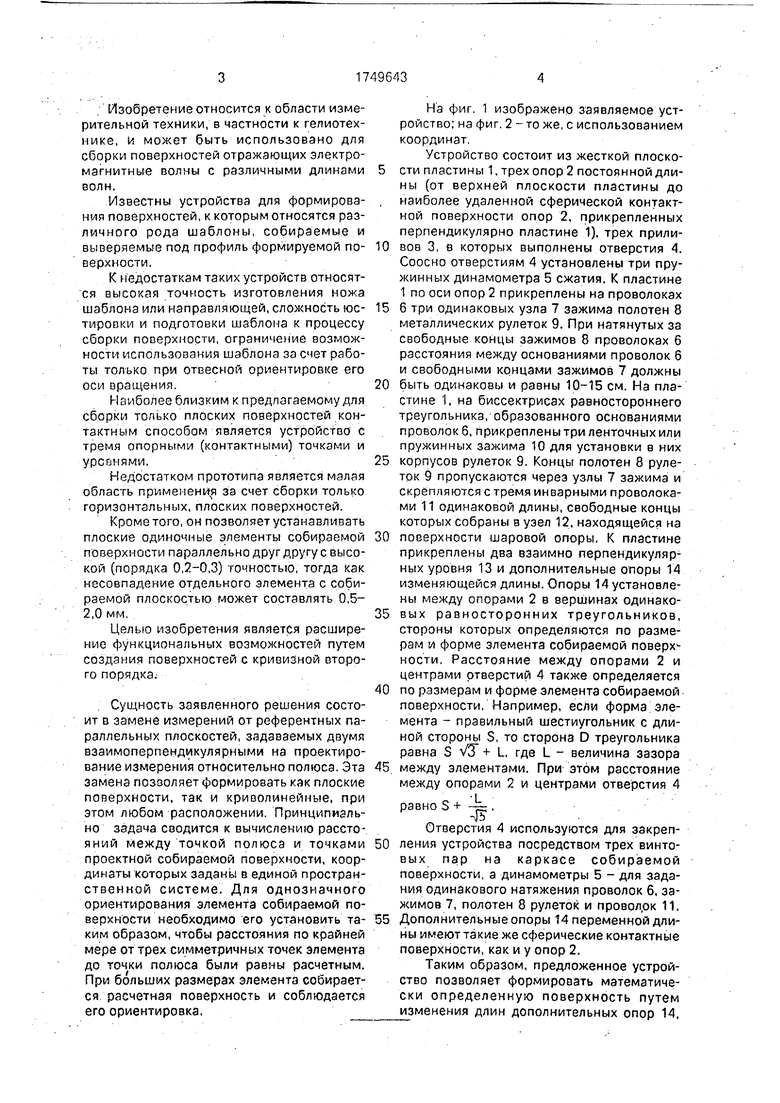
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ юстировки гелиостатов авторефлексионной маркой | 1990 |
|
SU1815532A1 |
| СФЕРИЧЕСКАЯ ГИДРОАКУСТИЧЕСКАЯ АНТЕННА | 2012 |
|
RU2515133C1 |
| Гелиостат | 1980 |
|
SU877260A1 |
| Способ настройки клети поперечно-винтовой прокатки | 1987 |
|
SU1468619A1 |
| Способ юстировки и контроля плоских фацетных гелиостатов | 1990 |
|
SU1747811A1 |
| Устройство для крепления и юстировки фацет гелиостата | 1988 |
|
SU1613818A1 |
| Устройство для юстировки фацетных зеркальных поверхностей | 1989 |
|
SU1677456A1 |
| ПРИЗМАТИЧЕСКИЙ ДЕТЕКТОР | 2007 |
|
RU2356068C1 |
| Стенд для исследования зеркал | 1984 |
|
SU1177601A1 |
| ДВУХКООРДИНАТНЫЙ ПРИЗМАТИЧЕСКИЙ ДЕТЕКТОР | 2007 |
|
RU2354995C1 |
Использование: изобретение относится к гелиотехнике и может быть использовано для сборки поверхностей с отражающим покрытием применительно к гелиостатам и концентраторам солнечной энергии. Сущность изобретения: устройство состоит из жесткой плоской пластины 1, трех опор 2, трех приливов 3, в которых выполнены отJ Г верстия 4 для закрепления устройства посредством трех винтовых пар. К пластине 1 по оси опор 2 прикреплены через динамометры 5 (необходимы для задания одинакового натяжения проволок 6) три идентичных узла зажима 7 полотен 8 металлических рулеток 9. Основания проволок 6 образуют на пластине 1 равносторонний треугольник, на биссектрисах которого прикреплены три ленточных зажима 10 для установки в них корпусов рулеток 9. При этом концы полотен 8 рулеток 9 пропущены через узлы зажима 7 и скрепляются с тремя инварными проволоками 11 одинаковой длины, свободные концы которых собраны в узел 12. Пластина 1 также снабжена дополнительными опорами 14 изменяющейся длины, которые установлены между опорами 2 в вершинах одинаковых равносторонних треугольников, стороны которых определяются по размерам и форме отражающего элемента собираемой поверхности. Расстояния между опорами 2 и центрами отверстий 4 также обусловливаются размерами и формой фацеты собираемой поверхности. 2 ил. сл С ч -N ю С 4 GO Фиг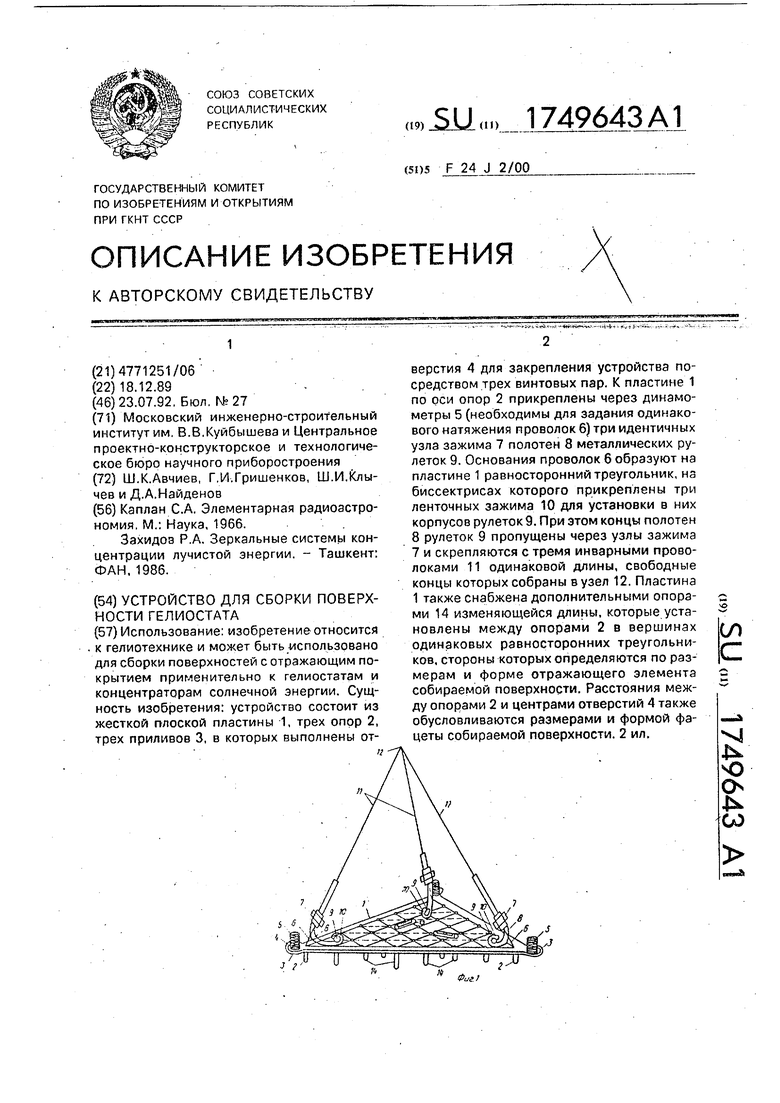
Фиг. 2
| Каплан С.А | |||
| Элементарная радиоастрономия, М.: Наука, 1966 | |||
| Захидоз Р.А | |||
| Зеркальные системы концентрации лучистой энергии, - Ташкент: ФАН, 1986. |
