Изобретение относится к области гидроакустики и может быть использовано преимущественно в качестве пеленгационной антенны для гидроакустических систем подводной навигации с ультракороткой базой.
При разработке систем гидроакустической навигации с ультракороткой базой, выполняющих определение местоположения объекта навигации по угловым измерениям направления на гидроакустический маяк-ответчик из одной точки, в которой устанавливается пеленгационная антенна малых волновых размеров, основной является задача достижения наибольшей точности угловых измерений при стремлении к уменьшению массы, габаритов и сложности антенны.
В качестве способа повышения точности оценки горизонтального и вертикального угла прихода навигационного сигнала можно использовать методы сверхразрешения (Ратынский М.В. Адаптация и сверхразрешение в антенных решетках. - М.: Радио и связь, 2003), позволяющие оценивать направления на источники сигналов с угловым разрешением, большим чем ширина основного лепестка диаграммы направленности антенны, и заключающиеся в применении спектральных методов анализа корреляционной матрицы сигналов, принятых преобразователями антенны. Одним из методов сверхразрешения является метод MUSIC (Multiple Signal Classification) - метод многосигнальной классификации, позволяющий оценивать направления на несколько источников сигналов, принятых антенной одновременно. Результатом работы такого метода является пеленгационный рельеф (Малышкин Г.С. Оптимальные и адаптивные методы обработки гидроакустических сигналов. - СПб.: ОАО «Концерн ЦНИИ «Электроприбор», 2011) - функция двух переменных (в случае определения направления в пространстве): горизонтального и вертикального углов направления на источник сигнала, имеющая максимумы соответствующие направлению на источники сигналов.
Однако, применение указанных методов анализа многомерного сигнала, принимаемого антенной, приводит к необходимости расстановки приемных преобразователей на поверхности антенны с расстояниями между соседними преобразователями, как можно более близкими к половине длины волны принимаемого сигнала. В случае если преобразователи в антенне находятся на расстояниях, больших чем указанные, в пеленгационном рельефе возникают ложные максимумы, не соответствующие направлениям на источники сигналов, что может привести к неверному определению направления на источник сигнала. В то же время для снижения взаимодействия элементов антенны по полю необходимо использовать преобразователи и элементы конструкции, имеющие малые волновые размеры, расстояния между центрами соседних элементов должно быть больше длины волны (Смарышев М.Д., Добровольский Ю.Ю. Гидроакустические антенны. - Л.: Судостроение, 1984). Однако может быть достигнут компромисс в стремлении сократить количество преобразователей и получить пеленгационный рельеф без ложных максимумов. Данный компромисс заключается в подборе такого разреженного размещения преобразователей, которое дает приемлемое соотношение уровней истинных и ложных максимумов пеленгационного рельефа или диаграммы направленности антенны.
Для систем гидроакустической навигации с ультракороткой базой требуется как можно больший охват возможных направлений прихода навигационного сигнала от маяка-ответчика. Даже, если объект навигации и маяк-ответчик имеют близкую глубину погружения, из-за гидроакустической рефракции и отражений от дна и поверхности воды (Урик Р.Дж. Основы гидроакустики. - Л.: Судостроение, 1978) навигационный сигнал может прийти к антенне под значительным углом в вертикальной плоскости. Поэтому требуется антенна, способная охватить весь диапазон углов, не только в горизонтальной, но и вертикальной плоскости, при этом характеристика направленности антенны должна быть постоянна для всех направлений прихода сигнала. Всем указанным выше требованиям наилучшим образом удовлетворяет сферическая антенна.
Известна сферическая гидроакустическая антенна тракта шумопеленгования, содержащая сферический каркас, на который нанесено звукоизолирующее покрытие с равномерно размещенными на нем и жестко скрепленными каркасом гидроакустическими приемниками, количество которых достигает нескольких тысяч (см. описание изобретения к патенту США №4207621, МПК G01S 3/80, публикация 10.06.1980).
Недостатком известной антенны является зависимость чувствительности приемников от изменения гидростатического давления. Кроме того, изготовление такой антенны технологически сложно, поскольку требует закрепления на каркасе большого количества приемных элементов.
Известна сферическая гидроакустическая антенна, имеющая сферический корпус, покрытый пластинами, на котором расположены гидрофоны. Пластины имеют форму равнобедренных трапеций и расположены в полосах, параллельных экватору сферического корпуса антенны. Антенна крепится к корпусу судна и имеет технологический вырез, предназначенный для постановки устройства крепления и лишенный преобразователей. Также лишена преобразователей часть сферического корпуса, диаметрально противоположная технологическому вырезу (см. описание изобретения к патенту Франции №2709909, МПК H04R 1/44, публикация 17.03.1995).
Недостатком известной антенны является высокий уровень бокового поля и неравномерность характеристик направленности в плоскостях, перпендикулярных экватору сферического корпуса антенны.
Известна сферическая дифракционная гидроакустическая антенна, содержащая тонкостенную полую сферическую оболочку из металла и шести пьезоэлектрических преобразователей, расположенных снаружи на поверхности сферической оболочки, равномерно удаленных друг от друга по ее поверхности и прикрепленных к ней клеем по трем взаимно перпендикулярным осям с одновременным получением трехмерного пространства измерений и возможностью получить пеленг минимумом датчиков - пьезоэлектрических преобразователей (см. описание свидетельства РФ на полезную модель №4863, МПК H01Q 1/04, публикация 16.08.1997).
Недостатками известной антенны является невозможность различить направления прихода сигналов от нескольких источников, воздействующих на антенну одновременно в одном и том же частотном диапазоне, а также ухудшение характеристик при многолучевом распространении гидроакустического, кроме того, использование клея для крепления пьезоэлектрических преобразователей снаружи корпуса антенны может привести к потере преобразователя при внешних механических воздействиях или температурных перепадах во время погружения антенны в воду.
Известна сферическая гидроакустическая антенна для гидролокатора, содержащая сферический корпус, имеющий круглое отверстие для крепления к носителю гидролокатора, на котором установлены пьезоэлектрические преобразователи по спирали, закрученной по часовой стрелке и начинающейся от точки А пересечения осью, проходящей через центр круглого отверстия и центр сферического корпуса, его наружной поверхности, а первый по порядку пьезоэлектрический преобразователь расположен вблизи точки А (см. описание изобретения к патенту РФ №2460092, МПК G01S 15/00, публикация 27.08.2012).
Недостатком известной антенны, принятой за прототип, с точки зрения ее угловой разрешающей способности является то, что в режиме приема при формировании веера диаграмм направленности задействуется только часть преобразователей антенны, а размером плоского раскрыва, эквивалентного задействованной при приеме поверхности сферы, определяется ширина основного лепестка веера характеристик направленности, следовательно, для того, чтобы добиться высокого углового разрешения, необходимо увеличить размер антенны, а значит использовать в указанной конструкции большое количество преобразователей, что повышает конструктивную сложность антенны и ее массу.
Задачей заявляемого изобретения является создание сферической гидроакустической антенны, конструкция которой позволяет защитить пьезоэлектрические преобразователи от внешнего механического воздействия при небольшой массе антенны и получить пеленгационную характеристику, позволяющую определять направление на источник гидроакустического сигнала с высокой точностью при небольших размерах апертуры антенны.
Сущность заявляемого изобретения заключается в следующем.
Сферическая гидроакустическая антенна содержит тонкостенную полую сферическую оболочку, пьезоэлектрические преобразователи, опору для крепления антенны к носителю. Сферическая оболочка выполнена акустически прозрачной из пластика с равномерно расположенными отверстиями для заполнения оболочки водой при погружении антенны в воду, пьезоэлектрические преобразователи установлены на внутренней поверхности сферической оболочки.
Преобразователи являются всенаправленными в рабочем диапазоне длин волн антенны и расположены двенадцатью группами таким образом, что центры групп находятся в вершинах вписанного в сферу икосаэдра на расстояниях, меньших либо равных 1,5 длинам волн максимальной частоты полосы принимаемого сигнала, каждая из двенадцати групп образована тремя преобразователями так, что акустический центр каждого преобразователя группы находится в вершине равностороннего треугольника с длиной стороны, равной половине длины волны максимальной частоты полосы принимаемого сигнала. Преобразователи расположены таким образом, что ось опоры антенны располагается перпендикулярно одной из граней икосаэдра и проходит через центр равностороннего треугольника, образуемого этой гранью.
Это позволяет защитить пьезоэлектрические преобразователи от внешнего механического воздействия, снизить массу антенны, определять направления на источники гидроакустических сигналов с высокой точностью и разрешающей способностью при небольших размерах апертуры антенны.
Защита пьезоэлектрических преобразователей от внешнего механического воздействия достигается благодаря заявленной схеме размещения гидроакустических преобразователей внутри оболочки антенны. Размещение преобразователей внутри сферической оболочки позволяет использовать оболочку в качестве обтекателя антенны. Применение акустически прозрачной оболочки позволяет избавиться от затенения оболочкой преобразователей, находящихся на стороне антенны, противоположной источнику сигнала, и тем самым при приеме сигнала с любого направления задействовать все преобразователи антенны. Расположение центров групп преобразователей в вершинах икосаэдра позволяет добиться такого размещения групп, что соседние группы преобразователей находятся на поверхности сферической оболочки на одинаковых расстояниях, что позволяет получить равномерную характеристику направленности. Расположение преобразователей такими группами, что внутри каждой группы акустические центры преобразователей находятся в вершинах равносторонних треугольников с длиной стороны, равной половине длины волны максимальной частоты полосы принимаемого сигнала, а расстояние между соседними центрами групп не превышает 1,5 длин волн максимальной частоты полосы принимаемого сигнала, позволяет не допустить ложных максимумов в пеленгационном рельефе при низких отношениях сигнал/шум. Расположение преобразователей антенны таким образом, что ось опоры антенны располагается перпендикулярно одной из граней икосаэдра, и проходит через центр равностороннего треугольника, образуемого этой гранью, совпадая с осью антенны, являющейся диагональю куба, на котором построен икосаэдр, позволяет при креплении опоры к сферическому корпусу антенны не удалять преобразователи, мешающие креплению опоры к оболочке, и обеспечить равномерность характеристики направленности антенны. Акустическая прозрачность антенны и заявленная схема размещения преобразователей позволяют добиться эффективного применения метода MUSIC для анализа сигналов, принятых антенной, и тем самым определять направления на источники гидроакустических сигналов с высокой точностью и разрешающей способностью.
Сущность заявляемого изобретения поясняется чертежами, где на фиг.1 приводится изображение конструкции заявленной антенны с диаметром сферы, равным 160 мм, длиной ребра икосаэдра 84,1 мм, расстояниями между акустическими центрами пьезоэлектрических преобразователей, равными 25 мм, что соответствует половине длины волны акустического сигнала на частоте 30 кГц при скорости распространения звука в воде, равной 1500 м/с, оболочка для наглядности показана полупрозрачной, линиями условно показаны ребра икосаэдра, в вершинах которого находятся центры групп преобразователей, где цифрой 1 обозначена полая тонкостенная сферическая акустически прозрачная заполняемая водой оболочка; 2 - цилиндрические пьезоэлектрические преобразователи; 3 - отверстия для заполнения антенны водой; 4 - опора для крепления антенны к носителю; 5 - группа преобразователей, акустические центры которых расположены в вершинах равностороннего треугольника;
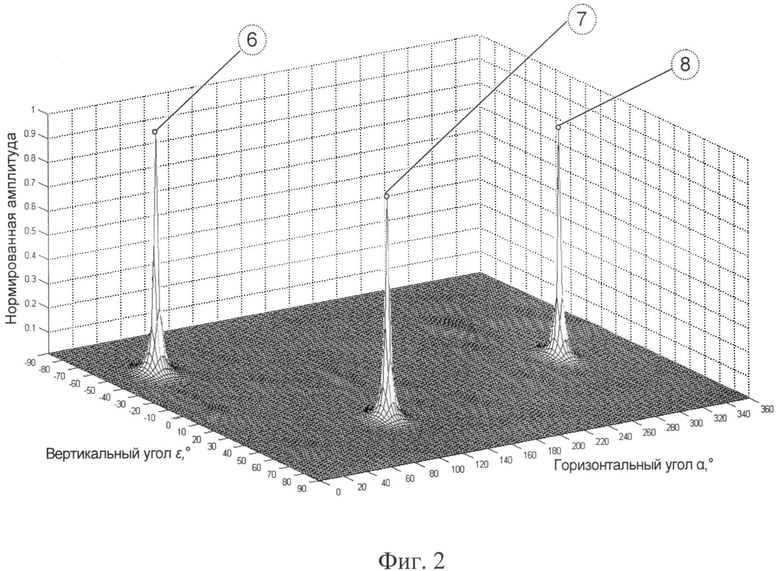
на фиг.2 приводится пеленгационный рельеф, построенный с помощью анализа методом MUSIC (Multiple Signal Classification) сигналов, одновременно принятых моделью заявленной антенны от трех источников, имеющих одинаковую мощность излучения в полосе 25-30 кГц в условиях воздействия пространственно-изотропной помехи в виде белого гауссового шума с отношением сигнал/шум -10 дБ в полосе частот полезных сигналов, где цифрой 6 обозначен локальный максимум, соответствующий источнику сигнала с угловыми координатами 40° в горизонтальной плоскости и -50° в вертикальной плоскости; 7 - локальный максимум, соответствующий источнику сигнала с угловыми координатами 120° в горизонтальной плоскости и 40° в вертикальной плоскости; 8 - локальный максимум, соответствующий источнику сигнала с угловыми координатами 300° в горизонтальной плоскости и 10° в вертикальной плоскости.
Сферическая гидроакустическая антенна содержит: полую тонкостенную сферическую акустически прозрачную заполняемую водой оболочку 1, пьезоэлектрические преобразователи 2, отверстия 3 для заполнения корпуса водой, опору 4 для крепления антенны к носителю.
Антенна работает следующим образом: звуковые волны от М источников сигналов возбуждают механические колебания N=36 пьезоэлектрических преобразователей 2 антенны, на выходах которых возникают электрические сигналы. Из-за акустической прозрачности сферического корпуса 1 антенны в формировании электрических сигналов, содержащих информацию о направлении на конкретный источник акустического сигнала, участвуют все преобразователи антенны.
Ввиду пространственного разнесения преобразователей сигналы связанных с ними каналов антенны имеют фазовые задержки, на основе которых оцениваются направления на источники сигналов, для чего сигналы преобразователей антенны усиливают, оцифровывают, вычисляют их комплексную огибающую и заносят в память вычислительной машины блоками, из каждого блока оцифрованных сигналов преобразователей формируют матрицу Xfr размером N×L, где N - количество преобразователей в антенне, L - длина блока с сигналом, по матрице X строят выборочную оценку корреляционной матрицы 

где fr - номер блока, Kfr - количество блоков сигнала, участвующих в усреднении.
С антенной связывают трехмерную прямоугольную систему координат OXYZ, ориентированную таким образом, что ее центр О совмещен с центром сферической антенны, ось OZ направлена вниз. Направление на каждый источник сигнала задают горизонтальным и вертикальным углами α и ε соответственно. Горизонтальный угол α отсчитывается от положительного направления оси ОХ по часовой стрелке, если смотреть на плоскость OXY сверху. Вертикальный угол 8 отсчитывается от плоскости OXY вниз.
Принимая допущение, что помеха пространственно изотропна и является белым Гауссовым шумом с нулевым средним, выполняют вычисление матрицы собственных векторов U и матрицы собственных значений Λ оценочной корреляционной матрицы 

где 
для М - источников сигналов, имеющих горизонтальные и вертикальные углы направления в пространстве: α1,ε1,…,αM,εM, Н - символ Эрмитова сопряжения комплекснозначной матрицы,

- направляющий вектор антенны, характеризующий воздействие сигнала одного источника на несущей частоте f0 с направления, задаваемого горизонтальным углом α и вертикальным углом ε на N преобразователей антенны.
Для подтверждения работоспособности заявленной антенны указанным методом был построен пеленгационный рельеф для сигналов, одновременно принятых моделью заявленной антенны от трех источников, имеющих одинаковую мощность излучения в полосе 25-30 кГц. Первый источник сигнала с угловыми координатами α=40° в горизонтальной плоскости и ε=-50° в вертикальной плоскости; второй источник сигнала с угловыми координатами α=120° в горизонтальной плоскости и ε=40° в вертикальной плоскости; третий источник сигнала с угловыми координатами α=300° в горизонтальной плоскости и ε=10° в вертикальной плоскости. Сигналы принимались в условиях воздействия пространственно-изотропной помехи в виде белого Гауссового шума с отношением сигнал/шум - 10 дБ в полосе частот полезных сигналов. Результат моделирования показан на фиг.2, где цифрой 6 обозначен локальный максимум, соответствующий первому источнику сигнала, 7 -локальный максимум, соответствующий второму источнику сигнала, 8 -локальный максимум, соответствующий третьему источнику сигнала. По графику на фиг.2 видно, что пеленгационный рельеф не имеет ложных максимумов, локальные максимумы точно соответствуют направлениям на источники сигналов.
Таким образом, задачу изобретения можно считать решенной.
Заявленное изобретение позволяет защитить пьезоэлектрические преобразователи от внешнего механического воздействия, снизить массу антенны, определять направления на источники гидроакустических сигналов с высокой точностью и разрешающей способностью при небольших размерах апертуры антенны.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК-ОТВЕТЧИК В УСЛОВИЯХ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ НАВИГАЦИОННОГО СИГНАЛА | 2012 |
|
RU2515179C1 |
| МНОГОЧАСТОТНЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2017 |
|
RU2689998C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| ГИДРОАКУСТИЧЕСКАЯ АНТЕННА СФЕРИЧЕСКОЙ ФОРМЫ ДЛЯ ГИДРОЛОКАТОРА | 2011 |
|
RU2460092C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК-ОТВЕТЧИК ПО ГОРИЗОНТАЛЬНОМУ И ВЕРТИКАЛЬНОМУ УГЛУ | 2011 |
|
RU2492498C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| ЭЛЕКТРОАКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПАРАМЕТРИЧЕСКОЙ ГЕНЕРАЦИИ УЛЬТРАЗВУКА | 2017 |
|
RU2697566C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
Использование: изобретение относится к гидроакустической технике. Сущность: антенна содержит тонкостенную полую сферическую оболочку, пьезоэлектрические преобразователи, опору для крепления антенны к носителю. Сферическая оболочка выполнена акустически прозрачной из пластика с равномерно расположенными отверстиями для заполнения оболочки водой при погружении антенны в воду, пьезоэлектрические преобразователи установлены на внутренней поверхности сферической оболочки. Преобразователи являются всенаправленными в рабочем диапазоне длин волн антенны и расположены двенадцатью группами таким образом, что центры групп находятся в вершинах вписанного в сферу икосаэдра на расстояниях, меньших либо равных 1,5 длинам волн максимальной частоты полосы принимаемого сигнала, каждая из двенадцати групп образована тремя преобразователями так, что акустический центр каждого преобразователя группы находится в вершине равностороннего треугольника с длиной стороны, равной половине длины волны максимальной частоты полосы принимаемого сигнала. Преобразователи расположены таким образом, что ось опоры антенны располагается перпендикулярно одной из граней икосаэдра и проходит через центр равностороннего треугольника, образуемого этой гранью. Технический результат: обеспечение защиты пьезоэлектрических преобразователей от внешнего механического воздействия, снижение массы антенны, возможно определение направления на источники гидроакустических сигналов с высокой точностью и разрешающей способностью при небольших размерах апертуры антенны. 2 ил.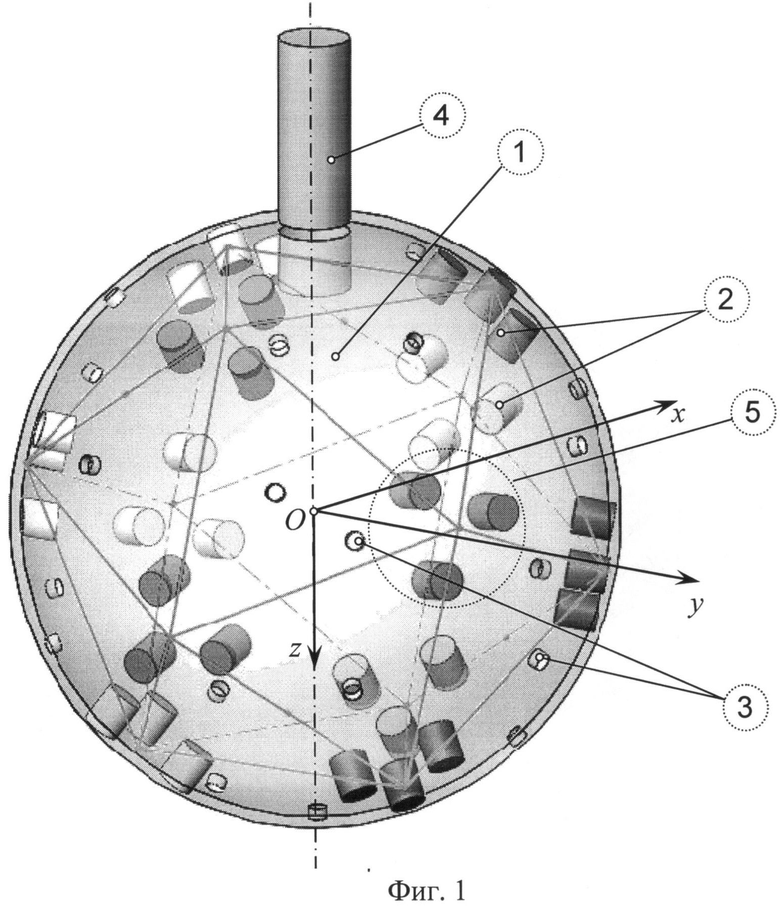
Сферическая гидроакустическая антенна, содержащая тонкостенную полую сферическую акустически прозрачную оболочку, выполненную из пластика с равномерно расположенными отверстиями для заполнения оболочки водой при погружении антенны в воду, всенаправленные в рабочем диапазоне длин волн антенны пьезоэлектрические преобразователи, установленные на внутренней поверхности сферической оболочки, опору для крепления антенны к носителю, отличающаяся тем, что преобразователи расположены двенадцатью группами таким образом, что центры групп находятся в вершинах вписанного в сферу икосаэдра на расстояниях, меньших либо равных 1,5 длинам волн максимальной частоты полосы принимаемого сигнала, каждая из двенадцати групп образована тремя преобразователями так, что акустический центр каждого преобразователя группы находится в вершине равностороннего треугольника с длиной стороны, равной половине длины волны максимальной частоты полосы принимаемого сигнала, ось опоры антенны располагается перпендикулярно одной из граней икосаэдра и проходит через центр равностороннего треугольника, образуемого этой гранью.
| ГИДРОАКУСТИЧЕСКАЯ АНТЕННА СФЕРИЧЕСКОЙ ФОРМЫ ДЛЯ ГИДРОЛОКАТОРА | 2011 |
|
RU2460092C1 |
| Jan Egil Kikebо, CURVED AND SPHERICAL ARRAYS, Cand.Scient.Thesis, University of Oslo, Department of Informatics, 15.08.2002, p.33-37, 44, 45, 71, 72, фиг | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Низколегированный медный сплав | 2018 |
|
RU2709909C1 |
| US2006164919 A1, 27.07.2006 | |||
| Способ производства длинномерных полых изделий из низкоуглеродистых легированных сталей | 1984 |
|
SU1235936A1 |
| Устройство для определения процентного соотношения минералов, содержащихся в горных породах | 1954 |
|
SU104732A1 |
| ГИДРОАКУСТИЧЕСКАЯ АНТЕННА | 1988 |
|
RU2153685C2 |

