Изобретение относится к области измерений в машиностроении, а именно к способам измерения углоп поворота механизмов вокруг оси вращения.
Известен способ измерения углов поворота материального объекта вокруг оси вращения, реализованный в измерительных приборах -1 теодолитах.
Недостатком способа является то, что данный принцип измерения угла поворота 10 нельзя применить при измерении поворотов большинства механизмов, необорудованных специальными угломерными приспособлениями - угломерными кругами.
Известен также способ измерения угла 15 поворота механизмов вокруг оси вращения. Согласно этому способу устанавливают угломерный прибор на поворачиваемый материальный объект, приблизительно совмещают ось вращения угломера с осью 20 вращения материального объекта. Производят первый отсчет по угломерному прибору при наведении его на реперную точку. Затем поворачивают материальный объект на некоторый угол, который необходимо изме- 25 рить, Угломер наводят на реперную точку и производят второй отсчет по угломеру. Разность двух отсчетов дает значение измеряемого угла.
Недостатком способа является то, что 30 для точного измерения угла поворот материального объекта необходимо совместить ось вращения угломера с осью вращения материального объекта, что не всегда представляется возможным, а невыполнение 35 этого условия приводит к появлению погрешности измерения угла поворота из-за несоосиого положения оси угломерного прибора и оси материального объекта.
Целью изобретения является повыше- 40 ние точности контроля угла поворота материального объекта вокруг оси вращения.
Поставленная цель достигается тем, что в способе измерения угла поворота материального объекта вокруг оси вращения, за- 45 ключающемся в том, что скрепляют с материальным объектом оптический углоиз- мерительный приборе круговой шкалой, со- В№ЯЦЗ.т ви-зирйую ось бпТГч ёекого углоизмерительного прибора с реперной 50 точкой, снимают отсчет ад по круговой шкале после поворота материального объекта совмещают визирную ось оптического углоизмерительного прибора с репэрной точкой, снимают второй отсчет ад по круговой 55 шкале и рассчитывают угол поворота, до и после поворота материального объекта совмещают визирную ось бптического углоизмерительного прибора с второй реперной
точкой, диаметрально расположенной к первой реперной точке относительно оси поворота материального объекта, снимают по круговой шкале отсчеты соответственно «в и «в,а расчет угла поворота tn материального объекта производят по формуле
, (1) ДА + «в
«А + ав
где о) - угол поворота;
ад - отсчет на первую реперную точку до поворота;
«А1 - отсчет на первую реперную точку после поворота;
(7в - отсчет на вторую реперную точку до поворота;
«в - отсчет на вторую реперную точку после поворота.
Выполнение измерений предлагаемым способом позволяет повысить точность измерения угла поворота материального объекта в тех случаях, когда ось угломерного инструмента не совмещена с осью вращения материального объекта и когда репер- ная точка расположена невдалеке от оси угломерного инструмента, например в лаборатории, цехе или другом ограниченном пространстве
На чертеже показаны оптический угло- измерительный прибор 1 с осью вращения I, материальный объект 2 с осью вращения О, угол поворота материальное о объекта ft), положение нуля углоизмерительного прибора соответственно до и после поворота материального объекта Hi и На, первая А и вторая В реперные точки, первые отсчеты «А, «в на точки А и В, вторые отсчеты «А , «в на точки А и В (после поворота), ось вращения 0 материального объекта, ось I вращения углоизмерительного прибора, расстояние А I 1 0 R от углоизмерительного прибора до реперных точек, 01 f- линейный элемент эксцентриситета
На материальном объекте 2 устанавливают углоизмерительный прибор 1 Вне материального объекта 2 выбирают две .реперные точки А и В так, что горизонтальные проекции линий А1 и BI лежат под углом 180° относительно оси I и на одинаковом расстоянии относительно оси О В этом исходном состоянии выполняют два измерения направлений «А и «в на точки А и В. Затем поворачивает материальный объект 2 на некоторый угол а и производим вторые измерения направлений r/д и г/г на точки А и В.
Вычисляют угол поворота м материального объекта 2 по формуле
/;
«А + «В
Вычисленный по формуле (1) угол поворота материального объекта 2 вокруг оси О содержит погрешность ДАВ за счет несовпадения оси вращения углоизмерительного прибора 1 и оси вращения материального объекта 2 О. Однако влияние этой погрешности существенно снижено по сравнению с прототипом. Если в прототипе, где используется только одна реперная точка А, погрешность в определении значения угла м равна отношению величины эксцентриситета к расстоянию от прибора 1 до реперной
точки, т.е. ДА - (для случая максималь- н
ного влияния при развороте в 90°), то для предлагаемого способа величина этой по|2
грешности равна ДАВ -г-, таким образом
R2 величина погрешности снижена в К раз, где
к- & - R
К -Т-.
ДАВI
Указанный способ был применен в реальных условиях для измерения угла поворота опорно-поворотного устройства {ОПУ) антенны, когда ОПУ и антенна закрыты радиопрозрачным сферическим колпаком радиусом R 3000 мм.
При- величине линейного элемента экс- центриситета I 20 мм измерения предлагаемым способом позволяют уменьшить погрешность по сравнению с известным в 150 раз.
10
15
20
25
30
Предлагаемый способ может быть применен для контроля угла поворота объектов, например зубчатых колес, углов призм, конусов, делительных устройств и т п , где требуется повышенная точность измерения этих углов
Формула изобретения Способ измерения угла поворота материального объекта вокруг оси вращения, заключающийся в том, что скрепляют с материальным объектом оптический углоиз- мерительный прибор с круговой шкалой, со- вмеид ают визирную ось оптического углоизмерительного прибора с реперной точкой, снимают отсчет «А по круговой шкале, после поворота материального объекта, совмещают визирную ось оптического углоизмерительного прибора с реперной точкой, снимают второй отсчет «А по круговой шкале и рассчитывают угол поворота материал ьйбго объекта, отличающийся тем, что, с целью повышения точности контроля, до и после поворота материального объекта совмещают визирную ось оптического угло- измерительного прибора с второй реперной точкой, диаметрально расположенной к первой реперной точке относительно оси поворота материального объекта, снимают по круговой шкале отсчеты соответственно огд и #в, а расчет угла поворота ы материального объекта производят по формуле
О)
НIIIt
«д+ав «А +«в 22

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |
| Способ построения пространственной геодезической сети в виде цепочки треугольников и угломерный прибор для его осуществления | 1986 |
|
SU1613858A1 |
| Способ измерения углов между отражающими элементами | 1991 |
|
SU1796896A1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВ И ФОРМИРОВАНИЯ УГЛОВЫХ МЕТОК | 1995 |
|
RU2115885C1 |
| УГЛОМЕР ДЛЯ ОПТИЧЕСКОГО НАБЛЮДАТЕЛЬНОГО ПРИБОРА | 1991 |
|
RU2025753C1 |
| УГЛОМЕР ДЛЯ ОПТИЧЕСКОГО НАБЛЮДАТЕЛЬНОГО ПРИБОРА | 1992 |
|
RU2047204C1 |
| СПОСОБ ВЫВЕРКИ НУЛЕВОЙ ЛИНИИ ПРИЦЕЛИВАНИЯ ОПТИЧЕСКОГО ПРИЦЕЛА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2023 |
|
RU2799659C1 |
| Лазерный угломер | 1990 |
|
SU1796902A1 |
| СИСТЕМА ОРИЕНТИРОВАНИЯ МОБИЛЬНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ИЗВЕСТНОМУ ОРИЕНТИРНОМУ НАПРАВЛЕНИЮ | 2024 |
|
RU2838002C1 |
| Прибор для калибровки аэрофотоаппаратов | 1974 |
|
SU519678A1 |
Изобретение относится к измерительной технике и позволяет повысить точность r/f измерения за счет исключения погрешности, обусловленной эксцентриситетом оси углоизмерительного прибора и оси поворота объекта. На материальном объекте 2 устанавливают углоизмерительный прибор 1. Выбирают две реперные точки А и В так, чтобы горизонтальные проекции линий AY и BY лежали под углом 180° относительно оси Y и на одинаковом расстоянии от оси О. В исходном положении измеряют угловые положения ад и ав точек А и В, а затем после поворота материального объекта измеряют угловые положения а / и ав точек А и В, после чего рассчитывают угол (У поворота материального объекта по формуле со ( + ав)/2-(ад+ ов)/2. 1 ил. (Л С XI Ь Ю 4J О СО 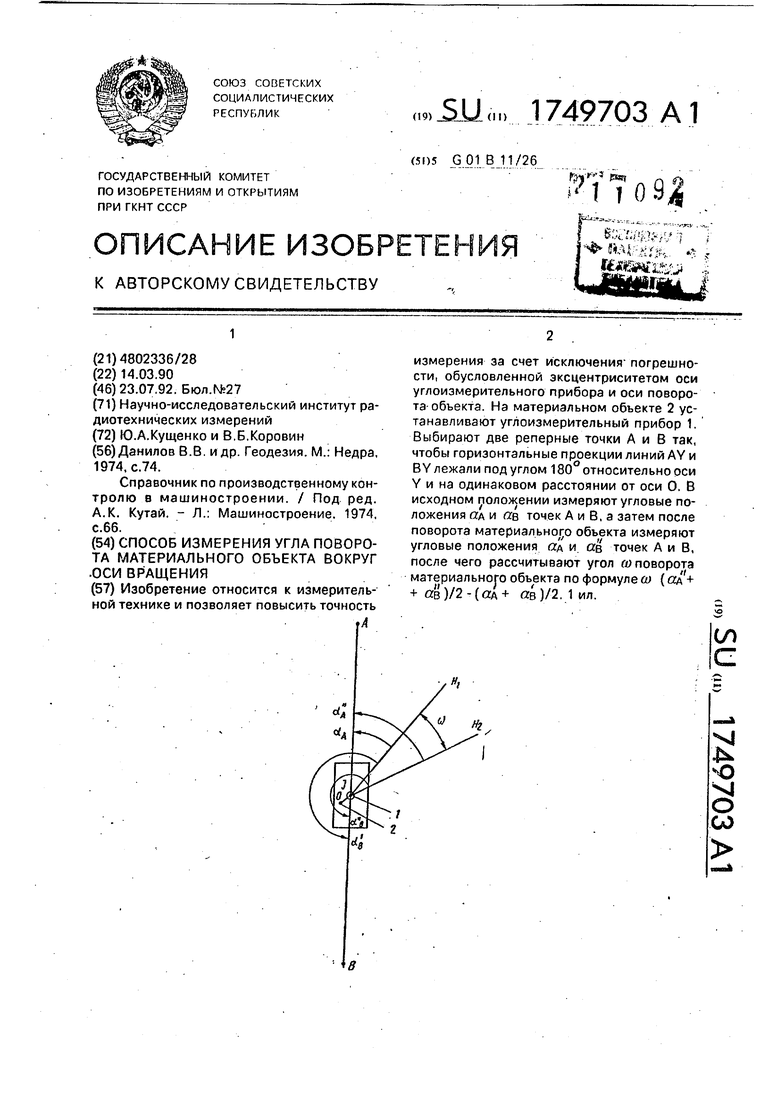
| Данилов В.В | |||
| и др | |||
| Геодезия | |||
| М.: Недра, 1974, с.74 | |||
| Справочник по производственному контролю в машиностроении | |||
| / Под ред | |||
| А.К | |||
| Кутай | |||
| - Л.: Машиностроение | |||
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
