Изобретение относится к области измерительной техники, а именно к средствам топогеодезической привязки мобильных радиолокационных станций (РЛС), к средствам и способам их ориентирования по известному направлению на ориентир с помощью оптического визирного устройства (визира).
Топогеодезическая привязка и ориентирование РЛС заключаются в определении координат места ее установки и дирекционного угла ее строительной (продольной) оси. Ориентирование РЛС, необорудованной встроенной гироскопической аппаратурой (ВГА), производится с помощью визиров, а для ориентирования РЛС, оборудованной ВГА, визир применяют в случаях, если данная аппаратура не обеспечивает заданную точность определения азимутальных направлений и при ее неисправности.
Ориентирование РЛС по известному ориентирному направлению производится с помощью визира ориентирования панорамного. Дирекционный угол (угол между направлением на север по географическому меридиану и направлением на ориентир, или азимут) на ориентир известен по карте либо задан службой топогеодезического обеспечения [1. Топогеодезическое и навигационное обеспечение артиллерии: учеб. пособие / М.Г. Ахметов [и др.]. - М.: Прометей, 2020. - 214 с. 2. Леденев А.Д, Рыхнов А.Г, Семченко М.Я., Крюков В.Г. Учебник сержанта ракетных войск и артиллерии. Для специалистов радиолокационной и радиотехнической разведки. М.: Воениздат, 1991. - 230 с].
Наиболее близкой к заявляемому изобретению является система ориентирования РЛС по известному ориентирному направлению, включающая в себя оптическое визирное устройство, установленное на посадочной площадке, расположенной сбоку зеркала антенны, при этом оптическая ось визирного устройства параллельна электрической оси антенны, которая жестко связана с азимутальным приводом и с устройством отсчета ее углового положения (дирекционного угла) в горизонтальной плоскости. Для ориентирования РЛС визир, установленный сбоку антенны, наводят на некоторый естественный ориентир и устанавливают на шкале отсчета значение азимута (дирекционного угла) на ориентир, после чего совмещают строительную ось РЛС (совпадающую с продольной осью симметрии автомобильного шасси, на котором установлена РЛС) антенны РЛС с направлением на ориентир и по шкале отсчета определяют азимут (дирекционный угол) РЛС [Леденев А.Д., Рыхнов А.Г., Семченко М.Я., Крюков В.Г. Учебник сержанта ракетных войск и артиллерии. Для специалистов радиолокационной и радиотехнической разведки. М: Воениздат, 1991. - 230 с]. Устройство ориентирования РЛС включает в себя оптический визир, установленный в носовой части шасси и снабженный шкалой отсчета азимута.
Описанный штатный способ ориентирования РЛС по известному ориентирному направлению с помощью визира имеет следующие недостатки:
1. Из-за технической невозможности установки визира в электрическом центре антенны (в точке расположения излучателя) визир устанавливают сбоку антенны, в результате чего в азимутальной проекции возникает несоответствие оптической оси визира и электрической оси антенны (это ось симметрии главного лепестка антенны), что приводит к недопустимой погрешности определения азимута (дирекционного угла установки) РЛС при небольших дальностях до ориентира, и возникает необходимость вычисления и последующего введения поправки к дирекционному углу.
2. Невозможность осуществления ориентирование РЛС на безориентирной местности в условиях недостаточной видимости при топогеодезической привязке РЛС.
На фиг.1 представлена схема расположения элементов системы ориентирования РЛС как наиболее близкого аналога, где использованы следующие обозначения: 1 - визирное устройство РЛС; 4 - антенна РЛС; 9 - опорная точка с известными прямоугольными координатами; 14 - ориентир; а - расстояние параллельного смещения оптической оси визира от электрической оси антенны в азимутальной проекции;  - дальность от электрического центра антенны до ориентира в азимутальной проекции;
- дальность от электрического центра антенны до ориентира в азимутальной проекции;  - горизонтальный угол между известным ориентирным направлением и электрической осью антенны.
- горизонтальный угол между известным ориентирным направлением и электрической осью антенны.
Ошибка в оценке истинного горизонтального углового положения  электрической оси антенны при визировании с боковой стороны антенны определяется по формуле [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1986. - 544 с. ]:
электрической оси антенны при визировании с боковой стороны антенны определяется по формуле [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1986. - 544 с. ]:

где  - горизонтальный угол между известным ориентирным направлением и электрической осью антенны; а - расстояние параллельного смещения оптической оси визира от электрической оси антенны в азимутальной проекции (на практике составляет 1,5 м); b -дальность от электрического центра антенны до ориентира в азимутальной проекции.
- горизонтальный угол между известным ориентирным направлением и электрической осью антенны; а - расстояние параллельного смещения оптической оси визира от электрической оси антенны в азимутальной проекции (на практике составляет 1,5 м); b -дальность от электрического центра антенны до ориентира в азимутальной проекции.
Например, при ориентировании РЛС по удаленным ориентирам, расположенным на дальностях b от 3 до 5 км, разница между истинным и измеренным азимутальными значениями αош составляет от 1' 43'' до 1' 2'' соответственно, что является допустимой погрешностью углового ориентирования, поскольку не превышает половины малого деления угломера, составляющей 1' 48''. При ориентировании РЛС по ориентирам, расположенным на небольших дальностях b - от 60 до 200 м, приемлемых для сложных метеорологических условий, разница между истинным и измеренным азимутальными значениями  составляет от 1° 26' до 0° 25' соответственно, что приводит к недопустимой погрешности углового ориентирования. Небольшие удаленности ориентиров повышают требования к точности установки РЛС на опорную точку.
составляет от 1° 26' до 0° 25' соответственно, что приводит к недопустимой погрешности углового ориентирования. Небольшие удаленности ориентиров повышают требования к точности установки РЛС на опорную точку.
Например, величина х несоответствия истинного углового положения воздушного объекта его измеренному значению в пространстве определяется по теореме косинусов равна [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1986. - 544 с. ]:

где х - величина несоответствия истинного углового положения воздушного объекта его измеренному значению в пространстве, км; с - дальность от электрического центра антенны до воздушного объекта в азимутальной проекции, км.
Используя известное выражение [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1986.-544 с. ]:

получим формулу расчета численного значения х:

Например, при обнаружении и сопровождении воздушного объекта на дальности с 100 км при горизонтальной угловой ошибке  от 1° 26' до 0° 25' несоответствия истинного углового положения воздушного объекта его измеренному значению х составляет от 2,5 км до 0,7 км соответственно.
от 1° 26' до 0° 25' несоответствия истинного углового положения воздушного объекта его измеренному значению х составляет от 2,5 км до 0,7 км соответственно.
Задача изобретения - повышение точности определения дирекционного угла установки и сокращение времени и обеспечение скрытности от визуального наблюдения процесса топогеодезической привязки радиолокационной станции на безориентирной местности и в условиях недостаточной видимости.
Технический результат достигается за счет того, что в систему ориентирования РЛС по известному ориентирному направлению, включающую в себя оптическое визирное устройство, установленное на посадочной площадке, расположенной сбоку зеркала антенны, при этом оптическая ось визирного устройства параллельна электрической оси антенны, которая жестко связана с азимутальным приводом и с устройством отсчета ее дирекционного угла в горизонтальной плоскости, введены геодезическая вешка, функционально связанная с визирным устройством, и устройство визуализации момента совмещения проекции на земную поверхность электрического центра антенны с опорной точкой - местом установки радиолокационной станции, а в визирное устройство введен инфракрасный канал наблюдения, в качестве приемника в котором использована микроболометрическая матрица, геодезическая вешка снабжена телескопической штангой с измерительной шкалой, позволяющей отмерить место установки излучателя вешки в вертикальной плоскости, перпендикулярной известному ориентирному направлению, в точке пересечения с линией, параллельно смещенной по горизонту от известного ориентирного направления на расстояние, равное расстоянию параллельного смещения оптической оси визира от электрической оси антенны в азимутальной проекции, устанавливается по направлению оптической оси визирного устройства в точке ее пересечения с вертикальной плоскостью на расстоянии от 60 до 200 м от электрического центра РЛС и представляет собой источник инфракрасного излучения и формирующую оптическую систему, приемный канал визирного устройства оптически связан с излучающим каналом геодезической вешки, выход визирного устройства связан с входом бортового компьютера, выход которого связан с входом исполнительного устройства - азимутального привода, механически связанного с антенной РЛС. Бортовой компьютер по сигналам с выхода отсчетного механизма визирного устройства формирует управляющий сигнал, являющийся входным сигналом исполнительного устройства, осуществляющего доворот электрической оси антенны РЛС по азимуту в направлении на ориентир на заданный дирекционный угол.
Исполнительное устройство представляет собой азимутальный привод с угломерным механизмом, осуществляющий выставку антенны РЛС по азимуту по сигналам визирного устройства через бортовой компьютер, формирующий управляющий сигнал.
Устройство визуализации представляет собой источник оптического излучения, включающий в себя светодиод или лазер, излучающие в видимом диапазоне оптического излучения, и формирующую оптическую систему, и установленный на подвижном шасси в точке проекции электрического центра антенны, расположенной на перпендикуляре, восстановленном из электрического центра антенны, к земной поверхности.
Инфракрасный канал включает в себя совмещенные, на основе использования микроболометрической «смотрящей» матрицы, прибор ночного видения и тепловизор, обеспечивающие скрытную визуализацию геодезической вешки.
Геодезическая вешка является искусственным ориентиром, представляет собой источник инфракрасного излучения и выполнена с возможностью обеспечения ее скрытного визирования в условиях недостаточной видимости и на фоне посторонних источников света.
Заявляемое изобретение обеспечивает исключение необходимости выполнения аналитического расчета и внесения поправок в процесс измерений дирекционного угла и, тем самым, обеспечивает сокращение общего времени топогеодезической привязки и ориентирования радиолокационной станции, а также ее установку на опорную точку с известными координатами с погрешностью в один-два сантиметра.
Благодаря описанным нововведениям заявляемое изобретение позволяет повысить точность, надежность и скрытность процесса ориентирования антенны РЛС в условиях недостаточной видимости при отсутствии естественных ориентиров, используя в качестве ориентира геодезическую вешку, устанавливаемую в непосредственной близости от позиции по линии визирования и наблюдаемую с помощью инфракрасного канала визирного устройства.
Заявляемое изобретение иллюстрируются чертежами, представленными на фиг.2, 3:
- фиг.2 - функциональная схема системы ориентирования мобильной радиолокационной станции по известному ориентирному направлению;
- фиг.3 - схема расположения на местности элементов системы ориентирования, вид сверху.
На фиг.2, 3 использованы следующие обозначения: 1 - визирное устройство РЛС; 2 - видимый канал наблюдения визирного устройства; 3 - инфракрасный канал наблюдения визирного устройства; 4 - антенна РЛС; 5 - устройство отсчета текущего горизонтального углового положения антенны; 6 - азимутальный привод РЛС; 7 - бортовой компьютер РЛС; 8 - автомобильное базовое шасси РЛС; 9а - устройство визуализации момента точного совмещения проекции электрического центра антенны на земную поверхность с обозначенной на местности опорной точкой с известными прямоугольными координатами и абсолютной высотой; 10 - излучатель излучающей геодезической вешки; 11 - формирующая оптическая система излучающей геодезической вешки; 12-источник инфракрасного излучения излучающей геодезической вешки; 13 - телескопическая штанга с измерительной шкалой излучающей геодезической вешки; 14 - ориентир; αОР - известный дирекционный угол ориентира; αОТС - горизонтальный угол между продольной осью симметрии автомобильного базового шасси и известным ориентирным направлением; αОСИ - дирекционный угол продольной оси симметрии автомобильного базового шасси; а - расстояние параллельного смещения оптической оси визира от электрической оси антенны в азимутальной проекции, - при этом приемный канал визирного устройства оптически связан с излучающим каналом геодезической вешки, выход визирного устройства связан с входом бортового компьютера, выход которого связан с входом азимутального привода, механически связанного с антенной РЛС.
Заявляемое изобретение работает следующим образом (см. фиг.2, 3). Мобильная РЛС заезжает на обозначенную на земной поверхности точку стояния РЛС, или опорную точку 9, с известными координатами. Перед заездом на точку стояния оператор включает устройство визуализации 9а и методом визуального наблюдения добивается совмещения светового пятна, создаваемого устройством визуализации 9а, с обозначенной опорной точкой 9, подав команду «Стоп!» водителю подвижного шасси. Устройство визуализации 9а представляет собой лазерный или светодиодный указатель, излучающий в видимом диапазоне оптического излучения. После установки подвижного шасси на точке стояния 9 РЛС оператор устанавливает излучающую геодезическую вешку 10 на некотором заданном расстоянии (от 60 до 200 м) от РЛС и включает ее. Другой оператор наводит визирное устройство 1, совмещенное с угломерным механизмом (на фиг.2, 3 не показан), на источник излучения вешки 10. При помощи телескопической штанги 13 с измерительной шкалой вешки отмеряют место установки излучателя 10 вешки в вертикальной плоскости, перпендикулярной известному ориентирному направлению, в точке пересечения с линией, параллельно смещенной в горизонтальной плоскости от известного ориентирного направления (проекции электрической оси антенны РЛС 4) на расстояние а (расстояние параллельного смещения оптической оси визирного устройства 1 от электрической оси антенны 4 в азимутальной проекции). При совмещении оптической оси визирного устройства 1 с направлением на источник излучения 10 геодезической вешки электрический сигнал с выхода визирного устройства 1 поступает на вход исполнительного устройства - азимутального привода 6, который перемещает антенну 4 РЛС по азимуту и устанавливает ее на заданный дирекционный угол. Источник излучения 10 геодезической вешки (см. фиг.2) представляет собой инфракрасный излучатель 12 в виде светодиода или лазера, излучающий в инфракрасном диапазоне на безопасной для глаз длине волны 1,54 мкм, и формирующую световой пучок оптическую систему 11. Визирное устройство 1 включает в себя видимый канал 2, используемый в дневное время для ориентирования антенны РЛС, и инфракрасный канал 3, используемый в условиях недостаточной освещенности (сумерки, ночь, дымка, туман). В качестве приемника ИК-излучения используется неохлаждаемая микроболометрическая матрица, принимающая ИК-излучение в спектральном диапазоне от 1 до 23 мкм.
Электрическая ось антенны 4 ориентируется под заданным дирекционным углом αОР на ориентир 14 наведением оптической оси визира 1 антенны 4 на излучатель 10 вешки вращением антенны 4 по азимуту с помощью азимутального привода 6 с устройством отсчета 5 текущего горизонтального углового положения антенны 4. Связь электрического информационного сигнала «визир 1 - бортовой компьютер 7 - азимутальный привод 6 с устройством отсчета 5» следующая: выход визира 1 связан с входом бортового компьютера 7, выход которого связан с входом азимутального привода 6, выход устройства отсчета 5 связан с входом бортового компьютера 7. Бортовой компьютер 7, на основе анализа сигналов с выхода визира 1 и с выхода устройства отсчета 5, формирует управляющий сигнал, пропорциональный разности между дирекционный углом ориентира αОР и дирекционного угла отсчета αОТС текущего азимутального положения электрической оси антенны (см. фиг.3), являющийся входным сигналом исполнительного устройства (азимутального привода) 6, осуществляющего наведение электрической оси антенны 4 по азимуту на заданное ориентирное направление. При необходимости наведение электрической оси антенны 4 по азимуту на заданное ориентирное направление можно осуществить в режиме ручного управления азимутальным приводом.
Заявляемое изобретение является промышленно применимым в мобильных РЛС при их подготовке к использованию по назначению.
Технический результат заключается в повышении точности углового ориентирования РЛС и в обеспечении скрытности от визуального наблюдения процесса ориентирования в условиях недостаточной видимости при помощи использования излучающей геодезической вешки и близко расположенного к позиции РЛС ориентира.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ГЕОДЕЗИЧЕСКИХ ДАННЫХ С ПОМОЩЬЮ УНИВЕРСАЛЬНОГО ТОПОПРИВЯЗЧИКА (УТП) | 2010 |
|
RU2440558C1 |
| Способ определения угла между оптической осью антенного устройства и продольной осью РЛС зенитного комплекса | 2019 |
|
RU2732202C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| Способ ориентирования мобильных объектов относительно объекта с известным дирекционным углом | 2018 |
|
RU2692945C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| СПОСОБ ПРЕДСТАРТОВОЙ ВЫСТАВКИ ВЫСОКОТОЧНЫХ РАКЕТ | 1995 |
|
RU2150124C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| СПОСОБ НАЧАЛЬНОГО ОРИЕНТИРОВАНИЯ ГИРОСКОПИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2016 |
|
RU2617147C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ ВЫСОКОГО КЛАССА ТОЧНОСТИ | 2012 |
|
RU2500990C1 |
| КОМПЛЕКТ ВЫНОСНОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2480714C2 |



Изобретение относится к области измерительной техники, а именно к средствам и способам ориентирования мобильных радиолокационных станций по известному направлению на ориентир с помощью оптического визирного устройства. В систему ориентирования РЛС по известному ориентирному направлению, включающую в себя оптическое визирное устройство, установленное на посадочной площадке, расположенной сбоку зеркала антенны, при этом оптическая ось визирного устройства параллельна электрической оси антенны, которая жестко связана с азимутальным приводом и с устройством отсчета ее дирекционного угла в горизонтальной плоскости, введены геодезическая вешка, функционально связанная с визирным устройством, и устройство визуализации момента совмещения проекции на земную поверхность электрического центра антенны с опорной точкой - местом установки радиолокационной станции. В визирное устройство введен инфракрасный канал наблюдения, в качестве приемника в котором использована микроболометрическая матрица, геодезическая вешка снабжена телескопической штангой с измерительной шкалой, позволяющей отмерить место установки излучателя вешки на расстоянии, равном расстоянию параллельного смещения оптической оси визира от электрической оси антенны в азимутальной проекции, устанавливается по направлению оптической оси визирного устройства на расстоянии от 60 до 200 м от электрического центра РЛС и представляет собой источник инфракрасного излучения, оптически связанный с приемным каналом визирного устройства. Технический результат - повышение точности определения дирекционного угла установки и сокращение времени процесса топогеодезической привязки РЛС на безориентирной местности и в условиях недостаточной видимости. 7 з.п. ф-лы, 3 ил.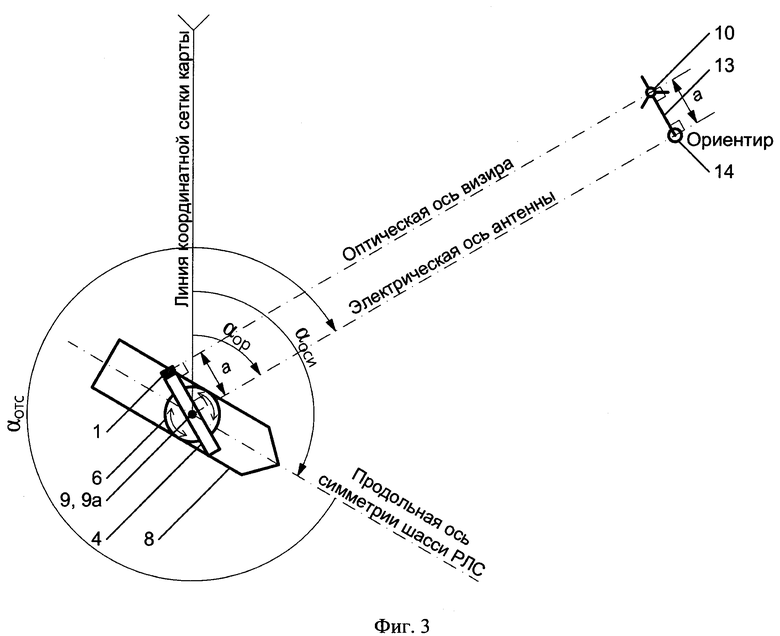
1. Система ориентирования мобильной радиолокационной станции по известному ориентирному направлению, включающая в себя оптическое визирное устройство, установленное на посадочной площадке, расположенной сбоку зеркала антенны, при этом оптическая ось визирного устройства параллельна электрической оси антенны, которая жестко связана с азимутальным приводом и с устройством отсчета ее дирекционного угла в горизонтальной плоскости, отличающаяся тем, что в нее введены геодезическая вешка, функционально связанная с визирным устройством, и устройство визуализации момента совмещения проекции на земную поверхность электрического центра антенны с опорной точкой - местом установки радиолокационной станции, а в визирное устройство введен инфракрасный канал наблюдения, в качестве приемника в котором использована микроболометрическая матрица, геодезическая вешка снабжена телескопической штангой с измерительной шкалой, позволяющей отмерить место установки излучателя вешки, равное расстоянию параллельного смещения оптической оси визира от электрической оси антенны в азимутальной проекции, устанавливается по направлению оптической оси визирного устройства в точке ее пересечения с вертикальной плоскостью на расстоянии от 60 до 200 м от электрического центра РЛС и представляет собой источник инфракрасного излучения и формирующую оптическую систему, приемный канал визирного устройства оптически связан с излучающим каналом геодезической вешки, выход визирного устройства связан с входом бортового компьютера, выход которого связан с входом исполнительного устройства - азимутального привода, механически связанного с антенной РЛС.
2. Система ориентирования по п. 1, отличающаяся тем, что бортовой компьютер по сигналам с выхода отсчетного устройства оптического визира формирует управляющий сигнал, являющийся входным сигналом азимутального привода, осуществляющего наведение электрической оси антенны радиолокационной станции на заданное ориентирное направление.
3. Система ориентирования по п. 1, отличающаяся тем, что источник инфракрасного излучения геодезической вешки представляет собой инфракрасный светодиод.
4. Система ориентирования по п. 1, отличающаяся тем, что источник инфракрасного излучения геодезической вешки представляет собой инфракрасный лазер.
5. Система ориентирования по п. 1, отличающаяся тем, что устройство визуализации представляет собой лазерный указатель опорной точки установки радиолокационной станции, ориентированный направлением излучения вертикально вниз и излучающий в видимом диапазоне оптического излучения.
6. Система ориентирования по п. 1, отличающаяся тем, что устройство визуализации представляет собой светодиодный указатель опорной точки установки радиолокационной станции, ориентированный направлением излучения вертикально вниз и излучающий в видимом диапазоне оптического излучения.
7. Система ориентирования по п. 1, отличающаяся тем, что геодезическая вешка выполнена с возможностью обеспечения ее визирования в условиях недостаточной видимости и на фоне посторонних источников света и обеспечения светомаскировки.
8. Система ориентирования по п. 1, отличающаяся тем, что обеспечивает исключение необходимости выполнения аналитического расчета угловой поправки и внесения ее в процесс измерений дирекционного угла и тем самым обеспечивает сокращение общего времени топогеодезической привязки и ориентирования радиолокационной станции с абсолютной погрешностью в один-два сантиметра.
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛИ МОБИЛЬНОЙ РЛС | 2008 |
|
RU2410711C2 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| Мобильная радиолокационная станция | 2017 |
|
RU2662447C1 |
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |

