Изобретение относится к области регулирования глубины погружения какого-либо элемента, действующего в подводной среде, и может быть использовано при подводной сейсмической разведке для стабилизации на определенной (заданной) глубине источников сейсмических волн приемных устройств.
Известно устройство для регулирования глубины погружения буксируемого б воде объекта, содержащее механизм регулирования глубины погружения и узел крепления. Механизм регулирования глубины погружения выполнен в виде кабеля ввода, связанного с буем-параваном и буксируемым объектом, поддерживающего буя, связанного с буем-параваном и концевого тела. Объект буксируется за кабель ввода и глубина его погружения зависит от длины тросика, соединяющего поддерживающий буй с буксируемым объектом. При необходимости с борта судна путем изменения длины тросика можно изменять глубину погружения объекта.
Недостатком данного устройства является сложность конструкции, заключающаяся в наличии в нем большого количества отдельных элементов, расположенных между собой на довольно больших расстояниях, что в конечном итоге приводит к неудобству данного устройства в эксплуатации.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для регулирования глубины погружения буксируемого в йоде объекта, содержащее корпус и связанную с корпусом и объектом ось вращения. Кроме того, устройство содержит крыло, образованное нижней и верхней поверхностями, заключенное между двумя боковыми стенками и выполненное с возможностью перемещения вокруг оси, дополнительную шарнирную ось и деформируемый элемент, причем нижняя и верхняя поверхность крыла шарнирно зак- реллены одними конца ми на указанной оси и соединены на других онцах деформируемым элементом, таже устройство содержит средства для создания между нижней и версл
с
2
ю со
о
Os
хней поверхностями усилия сдвига, равного усилию, образуемому гидростатическим давлением на заданной глубине и систему преобразования изменений указанного усилия сдвига в усилие для поворота крыла вокруг оси вращения. Средство для образования усилия сдвига между нижней и верхней поверхностями выполнено в виде манометрической коробки, расположенной внутри крыла, концы которой закреплены на указанных поверхностях и содержат надувной пояс, расположенный внутри крыла и пружины, закрепленные на указанных поверхностях.
Если весь буксируемый в погруженном состоянии комплекс опускается ниже уровня, на котором крыло находится в среднем состоянии, гидростатическое давление начинает превышать давление газа в манометрических коробках, в результате чего коробки сжимаются по своим осям. Нижняя и верхняя пластины крыла стремятся сблизиться и расстояние между стержнями уменьшается. Стержень перемещается в прорези в направлении ребра атаки крыла. Однако, вв идутого, что расстояния постоянны, такое перемещение становится возможным только в результате поворота шарнира вниз. Ребро атаки перемещается вверх, в результате чего под действием гидродинамической тяги крыло вместе с бусируе- мым элементом поднимается и выходит на заданную глубину. Как только будет достигнуто равенство давлений, крыло вновь встанет в среднюю позицию.
При перемещении буксируемого элемента выше заданной глубины устройство работает аналогичным образом. В результате поворота шарнира вверх ребро атаки крыла перемещается вниз и гидростатическое давление порождает усилие, стремящееся вернуть крыло на заданный уровень.
Основным недостатком данного устройства является сложность конструции, выра- жающаяся в большом количестве составляющих ее элементов, большинство из которых подвижны и сложны конструктивно.
Целью изобретения является упрощение конструкции устройства.
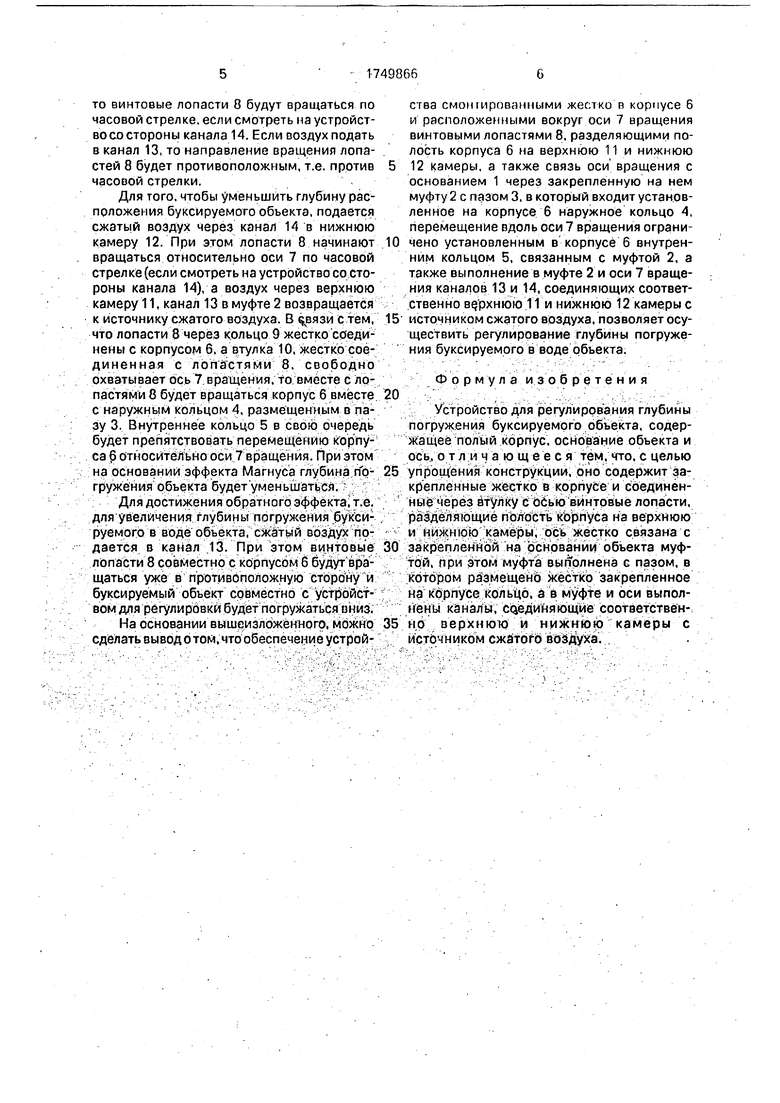
На чертеже изображено устройство для регулирования глубины погружения бусиру- емого в воде объекта, общий вид.
Устройство для регулирования глубины погружения буксируемого в воде объекта состоит из жестко соединенной с основанием 1 муфты 2 и наружным пазом 3, в котором расположено наружное кольцо 4. которое удерживается в пазу 3 внутренним кольцом 5. Наружное ольцо 4, в соою очередь, жестко
соединено с корпусом б, расположенным с возможностью поворота относительно оси вращения 7, жестко соединенной с муфтой 2. Внутри корпуса 6 расположены винтовые
лопасти 8, через кольцо 9 жестко соединенные с корпусом 6. Ось 7 вращения, в свою очередь, свободно охватывается втулкой 10, жестко соединяющей с винтовыми лопастями 8. Винтовые лопасти 8 разделяют повер0 хность корпуса 6 на верхнюю 11 и нижнюю 12 камеры. В муфте 2 и оси 7 вращения выполнены соответственно каналы 13 и 14, соединенные с источником сжатого воздуха (не показан).
5 Устройство для регулирования глубины погружения в воде объекта буксируется судном (не показано) с помощью каната 15, связанного через кольцо 16, через кронш теин 17с основанием 1 и с помощью каната
0 18, связанного через кольцо 19, через кронштейн 20 с осью 7 вращения.
Буксируемый объект (не показан) расположен внутри основания 1. Направление движения судна условно показано стрелкой
5 21.
Устройство для регулирования глубины погружения буксируемого в воде объекта работает следующим образом.
Объект совместно с устройством для ре0 гулирования буксируется судном с помощью каната 15, соединенного с основанием 1 через кольцо 16 и крони/тейн 17 и с помощью каната 18, соединенного с осью 7 вращения через кольцо 19 и кронштейн 20. Направле5 ние перемещения судна указано стрелкой 21, В соответствии с эффектом Магнуса твердый цилиндр, вращающийся вокруг продольной оси в набегающем потоке жидкости или газа, увлекает прилегающие к не0 му слои жидкости или газа, в результате окружающая среда совершает движение относительно цилиндра не только поступательное, но и вращательное.
В этой зоне, где направление поступа5 тельного и вращательного движения совпадают, результирующая скорость движения окружающей среды превосходит скорость потока. С противоположной стороны цилиндра поток, возникающий из-за вращения,
0 противодействует поступательному потоку и результирующая скорость падает. В соответствии с законом Бернулли при увеличении скорости в потоке давление понижено и наоборот. Потому с разных сторон на вра5 щающийся цилиндр действуют разные силы. В итоге появляется результирующая сила, которая всегда направлена перпендикулярно образующим цилиндра к потоку. Условно принимаем, что если от источника сжатого воздуха подать воздух к каналу 14,
то винтовые лопасти 8 будут вращаться по часовой стрелке, если смотреть на устройство со стороны канала 14. Если воздух подать в канал 13, то направление вращения лопастей 8 будет противоположным, т.е. против часовой стрелки.
Для того, чтобы уменьшить глубину расположения буксируемого объекта, подается сжатый воздух через канал 14 в нижнюю камеру 12. При этом лопасти 8 начинают вращаться относительно оси 7 по часовой стрелке (если смотреть на устройство со стороны канала 14), а воздух через верхнюю камеру 11, канал 13 в муфте 2 возвращается к источнику сжатого воздуха. В %вязи с тем, что лопасти 8 через кольцо 9 жестко соединены с корпусом б, а втулка 10, жестко соединенная с лопастями 8, свободно охватывает ось 7 вращения, то вместе с лопастями 8 будет вращаться корпус 6 вместе с наружным кольцом 4, размещенным в пазу 3. Внутреннее кольцо 5 в свою очередь будет препятствовать перемещению корпуса 6 относительно оси 7 вращения. При этом на основании эффекта Магнуса глубина погружения объекта будет уменьшаться.
Для достижения обратного эффекта, т.е. для увеличения глубины погружения буксируемого в воде объекта, сжатый воздух подается в канал 13. При этом винтовые лопасти 8 совместно с корпусом 6 будут вращаться уже в противоположную сторону и буксируемый объект совместно с устройством для регулировки будет погружаться вниз.
На основании вышеизложенного, можно сделать вывод о том, что обеспечение устройсгва смоншрованными жеслко в корпусе 6 и расположенными вокруг оси 7 вращения винтовыми лопастями 8, разделяющими полость корпуса 6 на верхнюю 11 и нижнюю
12 камеры, а также связь оси вращения с основанием 1 через закрепленную на нем муфту 2 с пазом 3, в который входит установленное на корпусе б наружное кольцо 4, перемещение вдоль оси 7 вращения ограничено установленным в корпусе 6 внутренним кольцом 5, связанным с муфтой 2, а также выполнение в муфте 2 и оси 7 вращения каналов 13 и 14, соединяющих соответственно верхнюю 11 и нижнюю 12 камеры с
источником сжатого воздуха, позволяет осуществить регулирование глубины погружения буксируемого в воде объекта.
20
Формула изобретения
Устройство для регулирования глубины погружения буксируемого объекта, содержащее полый корпус, основание объекта и ось, отличающееся тем, что, с целью
упрощения конструкции, оно содержит закрепленные жестко в корпусе и соединенные через втулку с осью винтовые лопасти, разделяющие полость корпуса на верхнюю и нижнюю камеры, ось жестко связана с
закрепленной на основании объекта муфтой, при этом муфта выполнена с пазом, в котором размещено жестко закрепленное на корпусе кольцо, а в муфте и оси выполнены каналы, соединяющие соответственно верхнюю и нижнюю камеры с источником сжатого воздуха.
SSSSSS3
$
L 8
16
-...
4
-19
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ УПРАВЛЯЕМЫЕ КРЫЛЬЕВЫЕ СИСТЕМЫ И СПОСОБЫ | 2016 |
|
RU2729696C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА С ИСПОЛЬЗОВАНИЕМ БУКСИРУЕМЫХ КОМПОНЕНТОВ, НАХОДЯЩИХСЯ НИЖЕ ПОВЕРХНОСТИ ВОДЫ | 2015 |
|
RU2672044C2 |
| КОНФИГУРАЦИЯ БУКСИРОВКИ СЕЙСМИЧЕСКИХ ИСТОЧНИКОВ С ШИРОКИМ РАЗНОСОМ | 2018 |
|
RU2747833C1 |
| Способ управления сейсмоакустическими косами и устройство позиционирования для его осуществления | 2015 |
|
RU2607076C1 |
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
| СИСТЕМА УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ БУКСИРУЕМЫМ МОРСКИМ ОБЪЕКТОМ | 2020 |
|
RU2806020C2 |
| ПОЛУЧЕНИЕ СЕЙСМИЧЕСКИХ ДАННЫХ В РАЙОНАХ, ПОКРЫТЫХ ЛЬДОМ | 2015 |
|
RU2680259C2 |
| Параван для буксируемых приемных систем в морской сейсморазведке | 1983 |
|
SU1158957A1 |
Использование: при подводной сейсмической разведке для стабилизации глубины буксировки источников и приемников сейсмических волн. Сущность изобретения1 устройство содержит основание и вращающийся цилиндрический корпус, приводимый в движение с помощью расположенных внутри корпуса винтовых лопастей, на которые поступает сжатый воздух В соответствии с законом Бернулли появляется сила, перпендикулярная оси вращения буксируемого цилиндра, и в зависимости от направления его вращения приводящая к изменению глубины погружения устройства 1 ил
