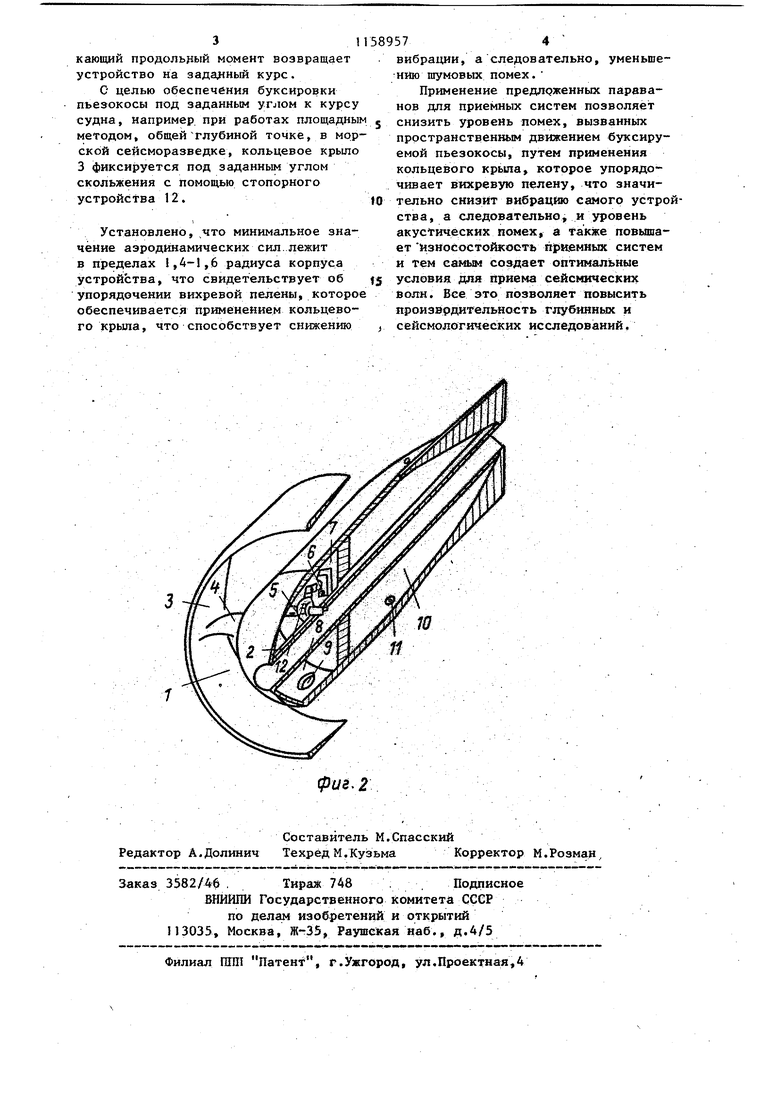
Изобретение относится к морской геофизике, в частности к устройствам автоматической регулировки движения буксируемых за судном устройств, в частности, приемных систем (пьезокос в морской сейсморазведке. Известные устройства предназначены для контроля глубины погружения пьезокос только в вертикальной плоскости .Cl 3 . Наиболее близким техническим решением к предлагаемому является параван для буксируемых приемных систем в морской сейсморазведке,содержащий корпус со сквозньи каналом вдоль его продольной оси и полостью, разделенной на две камеры поршнем, связанным посредством системы рычагов с крылом, укрепленным на корпусе с возможностью поворота вокруг горизонтальной оси, причем одна из камер заполнена газом под давлением а другая сообщается с .окружающей водой 2. Угол атаки горизонтальных лопасте регулируется с помощью штока, системы рычагов и поршня, который перемещается за счет разности давления в передней камере, через отверстие сообщающееся с окружающей устройство I водой и соответственно с давлением, равньм гидростатическому, в хвостовой камере, заполненной воздухом под давлением, равным гидростатическому давлению на требуемой глубине букси ровки пьезокосы. Недостатками прототипа являются невозможность контролировать движение пьезокосы в горизонтальной плос кости (по курсу ); вькокий уровень шумов при работе, обусловленных вибрацией устройства на пьезокосе. Кром того, устройство не обеспечивает буксировку пьезокосы под разным углом к курсу судна. Цель изобретения - снижение акустических помех и расширение функциональных возможностей за счет обеспе чения возможности стабилизации курса Поставленная цель достигается тем, что в параване для буксируемых приемных систем в морской сейсморазведке, содержащем корпус со сквозным каналом вдоль его продольнойоси и полостью, разделенной на две камеры поршнем, связанным посредством системы рычагов с крьтом, укрепленным на корпусе с возможностью поворота вокруг горизонтальной оси, причем одна из камер заполнена газом под давлением, а другая сообщается с.окружающей водой, крыло выполнено кольцевым с радиусом в пределах , 41,6 радиуса корпуса и укреплено на нем с возможностью поворота вокруг вертикальной оси. На фиг.1. показано устройство, общий вид; на фиг.2 - разрез устройства. : Параван для буксируемых приемных систем (пьезокос ) в морской сейсморазведке состоит из корпуса 1 со сквозным канало.м 2 вдоль его продольной оси, пропускающее пьезокосу, кольцевого крьта 3, которое с помощью пилонов 4 жестко сопряжено со щтоком 5, системы рычагов 6, поршня 7, пере-, мещающегося за счет разностей дав лений в -передней камере 8 с отверстием 9 ив хвостовой камере 10, ниппеля 11, стопорного устройства 12. Устройство работает следующим образом. В хвостову-ю камеру 10 через ниппель 11 накачивается воздух под дав- . лением, равным гидростатическому давлению воды на требуемой глубине погружения приемной системы. На требуемой глубине буксировки кольцевое крыло 3 имеет нулевой угол атаки. Если глубина погружения пьезокосы превосходит заданную, то возникающая разность давлений в передней камере 3 и хвостовой камере 10 будет перемещать поршень 7 назад, заставляя через систему рычагов 6 вращаться шток 5 и пилоны 4, поворачивая кольцевое крыло на положительный угол атаки, возникающая при этом нормальная управляющая сила возвращает пьезокосу на требуемую глубину. Если же глубина погружения пьезо-. косы меньше заданной, поршень 7 будет перемещаться вперед и, соответственно, с помощью системы рычагов 6, штока 5, пилонов 3 поворачивает кольцевое крьто на отрицательный угол атаки. Возникающая при этом нормальная управляющая сила заставляет вспльшать устройство и, соответственно, приемную систему на требуемую глубину погружения. Принцип регулирования движения пьезокосы в горизонтальной плоскости (по курсу ) поясняет схема,изображенная на фиг.2. При отклонении устройства от требуег;| мого курса (положение о и Ъ) возни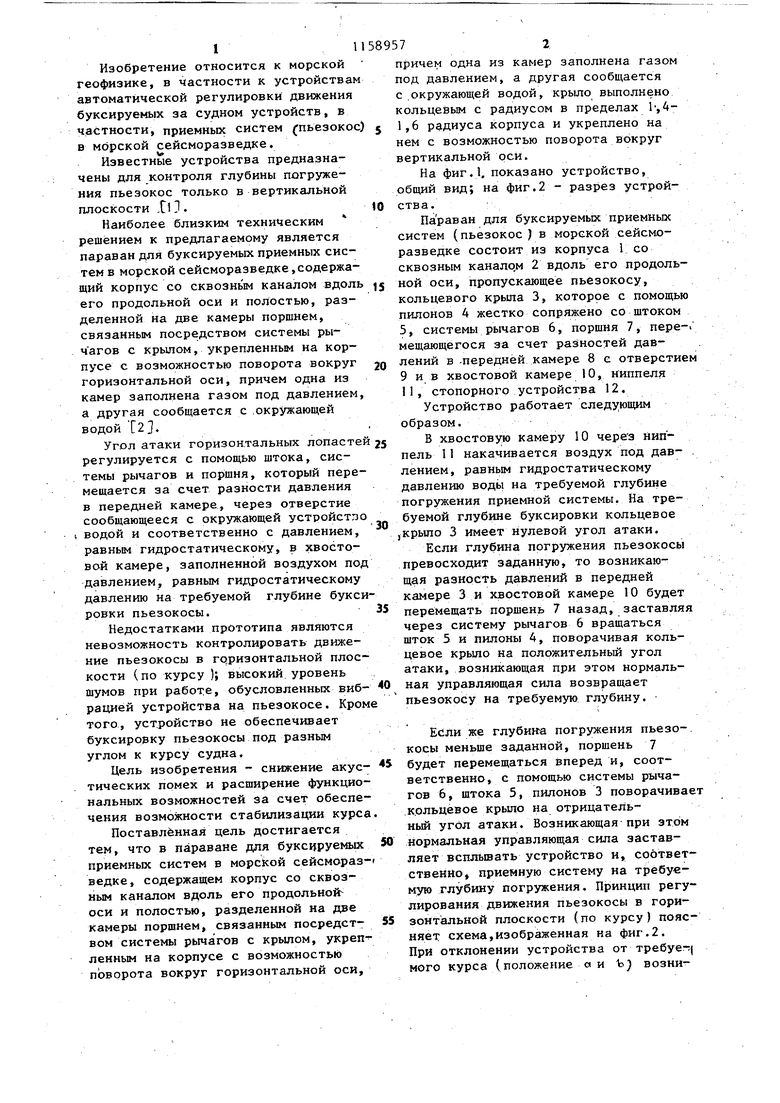
ПАРАВАН ДЛЯ БУКСИРУЕМЫХ ПРИЕМНЫХ СИСТЕМ В МОРСКОЙ СЕЙСМОРАЗВЕДКЕ, содержащий корпус со сквозным каналом вдоль его продольной оси и полостью, разделенной на две камеры поршнем, связанным посредством системы рычагов с крьшом, укрепленным на корпусе с возможностью поворота вокруг горизонтальной оси, причем одна из камер заполнена газом под давлением, а другая сообщается с окружающей водой, отличающийс я тем, что, с целью снижения акустических помех и расширения функциональных возможностей за счет обеспечения возможности стабилизации курса, крыло выполнено кольцевым с радиусом в пределах 1,4-1,6 рйдиуса корпуса и укреплено на нем с возможностью поворота вокруг вертикальной (Л оси.. сд т 0 оч sl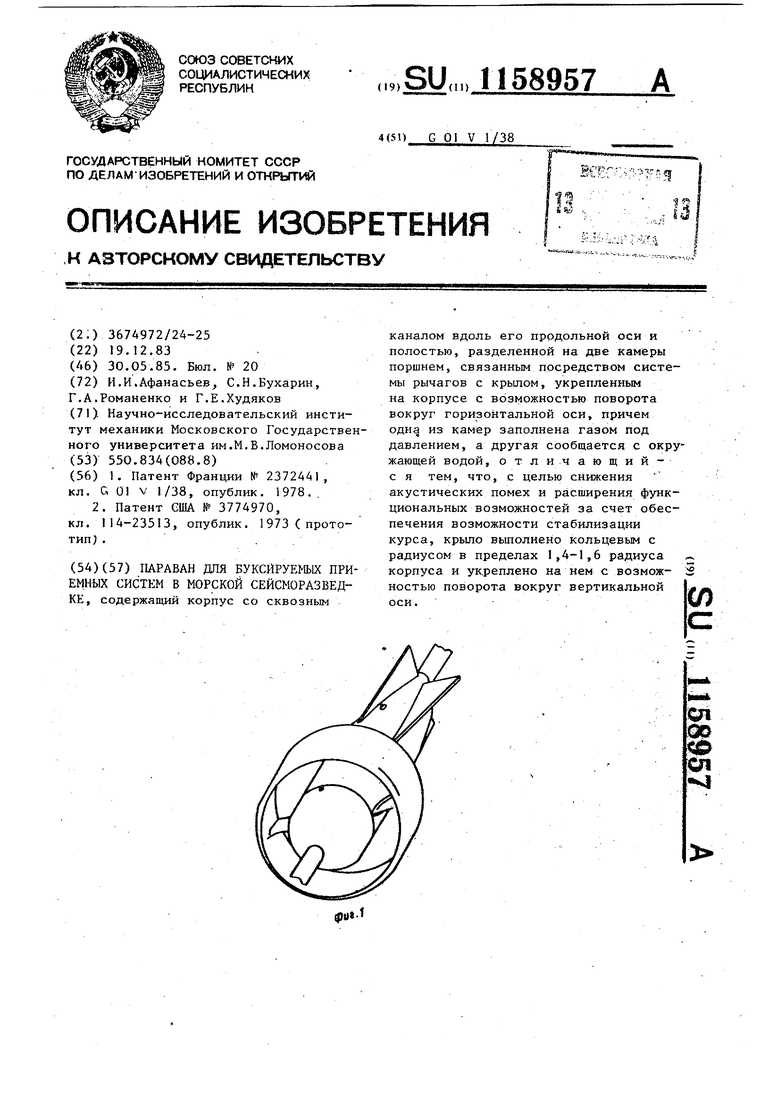
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АГРЕГАТ ДЛЯ ПРОМИНКИ С АРМИРОВАНИЕМ ОСНОВАНИЙ ПОД АВТОЗИМНИКИ НА БОЛОТАХ | 2008 |
|
RU2372441C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3774970, кл | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
| . | |||
