УРОВЕНЬ ТЕХНИКИ
[001] При обычной морской сейсморазведке используют сейсмический источник и некоторое количество буксируемых кос, буксируемых позади сейсморазведочного судна. Эти буксируемые косы имеют датчики, которые обнаруживают сейсмическую энергию для построения изображений пластов под морским дном. Выпуск буксируемых кос и источников и буксировка их во время разведки могут быть относительно простыми операциями в случае работы в открытых водах при умеренных волнениях или в подобной ситуации.
[002] В морских районах, покрытых льдом, обломками или другими препятствиями, или при сильном волнении, разведка может делаться более трудной, дорогостоящей или даже невозможной. Например, в покрытых льдом водах сейсморазведочное судно должно пробиваться через лед и пересекать воды, заполненные плавучими льдинами. Шум, создающийся при соударениях со льдом, может делать получаемую сейсмограмму трудной для понимания.
[003] Кроме того, плавучие льдины на поверхности воды делают буксировку источника и буксируемых кос более трудной и предрасполагают к возникновению повреждения. Например, любые компоненты системы на поверхности воды могут сталкиваться со льдом, застревать и теряться. Кроме того, на поверхности любых кабелей или буксирных тросов, отходящих от судна, даже со слипов, может нарастать лед. Точно так же, лед, затягиваемый под корпус и всплывающий позади судна, может сдвигать эти кабели и тросы.
[004] Некоторые способы выполнения сейсморазведочных работ в покрытых льдом районах, известные из уровня техники, раскрыты в патентах США №№5113376 и 5157636 (Bjerkoy). Однако до настоящего времени проблемы, связанные с морской сейсморазведкой в покрытых льдом и имеющих препятствия водах, не разрешены в достаточной степени.
[005] Предмет изобретения из настоящего раскрытия направлен на исключение или по меньшей мере ослабление отрицательных последствий одной или нескольких проблем, изложенных выше.
КРАТКОЕ ИЗЛОЖЕНИЕ
[006] В вариантах осуществления, раскрытых в этой заявке, морская разведочная аппаратура для судна имеет буксируемые компоненты для получения сейсмических данных. Буксируемые компоненты, буксируемые судном, погружены на первый уровень ниже поверхности воды.
[007] В конкретных вариантах осуществления аппаратуры буксируемые компоненты могут включать в себя трехмерную расстановку сейсмических буксируемых кос и источник (источники), которые имеют нейтральную плавучесть для буксировки ниже поверхности воды во время разведочных работ. Например, буксируемые компоненты могут включать в себя поплавок, погруженный ниже поверхности воды и поддерживающий по меньшей мере один буксируемый компонент. Поплавок имеет предварительно сконфигурированную плавучесть, чтобы буксируемый компонент мог буксироваться на заданной глубине ниже поверхности воды. Чтобы сконфигурировать плавучесть под характеристики реализации (например, под скорость буксировки, глубину, вес компонента и т.д.) в поплавке можно использовать плавучие вкладыши и прокладки с нейтральной плавучестью, расположенные в полости поплавка, для конфигурирования плавучести поплавка.
[008] Буксируемые компоненты могут включать в себя буксируемую косу, буксируемую судном и поддерживаемую поплавком. Такая буксируемая коса обычно имеет один или несколько датчиков для восприятия сейсмического сигнала. Кроме того, буксируемый компонент может включать в себя отклонитель кос, буксируемый судном и поддерживаемый поплавком. Отклонитель кос обычно соединен с одним или несколькими дополнительными буксируемыми компонентами.
[009] В конкретных вариантах осуществления, раскрытых в этой заявке, морское разведочное судно используют для буксировки буксируемых компонентов сейсмического оборудования на одном или нескольких кабелях или тросах. Судно имеет один или несколько скегов, установленных на судне и продолжающихся по меньшей мере ниже ватерлинии судна. Например, скег можно устанавливать на корме судна, а дистальный конец скега можно продолжать ниже кормы до по меньшей мере киля судна.
[010] Скег имеет одну или несколько челночных тележек, перемещаемых вдоль скега, и каждая из одной или нескольких челночных тележек в свою очередь имеет одну или несколько точек буксировки, расположенных на челночной тележке и перемещаемых вместе с ней вдоль скега. В одной или нескольких точках буксировки поддерживается один или несколько кабелей для буксировки сейсмического оборудования позади судна и ниже поверхности воды.
[011] Для направления челночной тележки скег может иметь рельсовый путь, продолжающийся вдоль скега, а шкивы могут перемещать челночную тележку вдоль первого скега. В дополнение к челночным тележкам в скеге образован проход, продолжающийся по меньшей мере ниже ватерлинии судна. Проход защищает один или несколько кабелей сейсмического оборудования, проходящих от судна до места ниже ватерлинии.
[012] В вариантах осуществления, раскрытых в этой заявке, в морской разведочной аппаратуре для судна, имеющей буксируемые компоненты для получения сейсмических данных, используется определение местоположения для нахождения относительных положений компонентов, погруженных ниже поверхности воды. В частности, по меньшей мере один первый приемопередатчик, расположенный на судне, излучает первый сигнал и обнаруживает первую информацию о положении буксируемых компонентов по первому сигналу. По меньшей мере один второй приемопередатчик, буксируемый с судна, погружен на второй уровень ниже поверхности воды. Второй приемопередатчик излучает второй сигнал и обнаруживает вторую информацию о положении буксируемых компонентов по второму сигналу. Например, этот второй приемопередатчик может быть расположен на выпущенном устройстве, буксируемом позади судна на большей глубине, чем глубина погружения различных буксируемых компонентов.
[013] Различные устройства можно использовать в качестве приемопередатчиков, чтобы обнаруживать информацию о положении. Например, приемопередатчики могут быть акустическими приемопередатчиками и могут излучать сигналы, такие как акустические сигналы для определения положения, сигналы системы ультракороткой базовой линии, сигналы системы короткой базовой линии и сигналы системы длинной базовой линии.
[014] В дополнение к первому и второму приемопередатчикам в аппаратуре может использоваться оборудование поперечной связи, расположенное вдоль буксируемых кос, буксируемых в расстановке позади судна. Когда с буксируемых кос получают сейсмические данные, оборудование поперечной связи излучает третий сигнал и обнаруживает третью информацию о положении буксируемых кос по третьему сигналу.
[015] Получаемая информации о положении может включать в себя расстояния (и пеленги) буксируемых компонентов относительно приемопередатчиков. В конечном счете процессор может обработать информацию о положении и может выполнить операцию вывода положений буксируемых компонентов для привязки к получаемым сейсмическим данным. Разрешающая способность этих выводимых положений может быть повышенной, поскольку информацию о положении получают благодаря двум различным аспектам (то есть, различным глубинам погружения и ракурсам первого и второго приемопередатчиков).
[016] Буксируемые компоненты могут включать в себя сейсмический источник, имеющий по меньшей мере один приемоответчик, отвечающий на первый сигнал. В этом случае по меньшей мере один первый приемопередатчик, расположенный на судне, может включать в себя один приемопередатчик, расположенный на судне, и может иметься второй приемопередатчик, расположенный на источнике. Приемопередатчик судна образует пару с приемоответчиком сейсмического источника, тогда как приемопередатчик источника излучает сигнал для дополнительных приемоответчиков буксируемых компонентов, буксируемых позади источника, для определения их относительного положения.
[017] В способе морской сейсморазведки, раскрытом в этой заявке, судно буксирует множество буксируемых компонентов, погруженных на первый уровень ниже поверхности воды, чтобы буксируемые компоненты могли получать сейсмические данные. Первую информацию о положении буксируемых компонентов обнаруживают по первому сигналу, излучаемому по меньшей мере первым приемопередатчиком, расположенным на судне. Кроме того, вторую информацию о положении буксируемых компонентов обнаруживают по второму сигналу, излучаемому по меньшей мере одним вторым приемопередатчиком, буксируемым позади судна и погруженным на второй уровень ниже поверхности воды.
[018] При обнаружении информации о положении могут быть получены по меньшей мере расстояния (и пеленги) буксируемых компонентов относительно приемопередатчиков. Для получения дополнительной информации оборудование поперечной связи может быть использовано на буксируемых косах буксируемых компонентов и может быть обнаружена третья информация о положении буксируемых кос по сигналам поперечной связи между буксируемыми косами.
[019] В конечном счете положения буксируемых компонентов могут быть уточнены обработкой различных частей информации о положении. В свою очередь уточненные положения могут быть привязаны к получаемым сейсмическим данным для повышения разрешающей способности сейсморазведки.
[020] В способе, раскрытом в этой заявке, проектируют сейсмическую расстановку, имеющую компоновку буксируемых компонентов с нейтральной плавучестью в воде при буксировке в продолжение сейсморазведки. Буксируемые компоненты включают в себя по меньшей мере буксируемые косы и отклонители кос. Способ включает в себя определение веса и лобового сопротивления при погружении буксируемых компонентов и вычисление сил лобового сопротивления в зависимости от плавучести, необходимой для поддержания нейтральной плавучести буксируемых компонентов при по меньшей мере одной скорости буксировки, на основании определенных веса и лобового сопротивления буксируемых компонентов.
[021] Способность к всплыванию сейсмической расстановки конфигурируют на основании вычисленных сил лобового сопротивления в зависимости от плавучести. Например, конфигурирование способности к всплыванию сейсмической расстановки может включать в себя конфигурирование первых поплавков для буксируемых кос сейсмической расстановки и/или вторых поплавков для отклонителей кос сейсмической расстановки. Кроме того, в качестве варианта способность к всплыванию можно конфигурировать для сейсмического источника, буксируемого при сейсморазведке.
[022] Уравновешивающие силы, необходимые для поддержания буксируемых кос сейсмической расстановки, имеющей сконфигурированную способность к всплыванию на по меньшей мере одной заданной глубине в воде, вычисляют в зависимости от одной или нескольких отклоняющихся переменных сейсморазведки. Например, отклоняющиеся переменные могут включать в себя изменение заданной скорости буксировки, изменение курса, окружающие условия, соленость воды, температуру воды и морское течение.
[023] Активные поверхности для регулирования сейсмической расстановки конфигурируют на основании вычисленных уравновешивающих сил. Например, одно или несколько управляемых подводных крыльев можно выбрать для установки на одной или нескольких буксируемых косах. Компоновку буксируемых компонентов в сейсмической расстановке проектируют со сконфигурированной способностью к всплыванию и сконфигурированными активными поверхностями.
[024] Поскольку сконфигурированная способность к всплыванию может изменить переменные, используемые при анализе, предпочтительно, чтобы способ включал в себя после конфигурирования способности к всплыванию определение лобового сопротивления при сконфигурированной способности к всплыванию и повторное вычисление сил лобового сопротивления в зависимости от плавучести, необходимой для поддержания нейтральной плавучести буксируемых компонентов при по меньшей мере одной скорости буксировки, на основании определенных веса и лобового сопротивления буксируемых компонентов и определенного лобового сопротивления при сконфигурированной способности к всплыванию.
[025] Поскольку сконфигурированная способность к всплыванию может нуждаться в регулировании в полевых условиях или для соответствия особенностям реализации, предпочтительно, чтобы способ включал в себя конфигурирование способности к всплыванию с учетом диапазона регулируемой плавучести. Диапазон регулируемой плавучести может быть определен в соответствии или не в соответствии с допуском, и в этом случае дополнительную способность к всплыванию конфигурируют для сейсмической расстановки.
[026] Приведенное выше краткое изложение не предполагается изложением каждого возможного варианта осуществления или каждого аспекта настоящего раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
[027] фиг. 1А-1В - виды сбоку и сверху морской сейсморазведочной системы согласно некоторым идеям настоящего раскрытия;
[028] фиг. 2А-2D - виды кормовых частей судна, имеющих скеги согласно различным вариантам осуществления, предназначенные для буксировки группы сейсмических буксируемых кос и источника из раскрытой морской сейсморазведочной системы;
[029] фиг. 3А-3В - виды кормы судна, имеющей скег с перемещаемыми челночными тележками для регулирования точек буксировки, согласно другому варианту осуществления;
[030] фиг. 3С - вид скега, имеющего расположенные рядом челночные тележки;
[031] фиг. 3D - вид скега, имеющего расположенные друг над другом челночные тележки;
[032] фиг. 4А - вид сверху скега из фиг. 3С;
[033] фиг. 4В - детализированный вид шкивных систем для скега из фиг. 3С;
[034] фиг. 4С - детализированный вид дистального конца скега из фиг. 3С;
[035] фиг. 5А - перспективный вид раскрытой морской сейсморазведочной системы с показом некоторых дополнительных компонентов;
[036] фиг. 5В - блок-схема последовательности действия способа проектирования трехмерной расстановки с нейтральной плавучестью, такой как на фиг. 5А;
[037] фиг. 6 - вид компонентов плавучести для источника и одной из буксируемых кос, буксируемых позади судна со скега, в системе из фиг. 5А согласно настоящему раскрытию;
[038] фиг. 7 - более детальный вид компонентов плавучести для источника из фиг. 6;
[039] фиг. 8А-8D - вид сбоку, вид с пространственным разделением деталей и два вида в разрезе поплавка с регулируемой плавучестью из компонентов плавучести на фиг. 7;
[040] фиг. 9А - вид поплавка с регулируемой плавучестью для буксируемой косы, такого как на фиг. 7;
[041] фиг. 9В-9С - виды в разрезе поплавка с регулируемой плавучестью для буксируемой косы, такого как на фиг. 7;
[042] фиг. 10А-10C - виды плавучих отклонителей кос согласно настоящему раскрытию для раскрытой морской сейсморазведочной системы;
[043] фиг. 11А - перспективный вид управляемого стабилизатора согласно настоящему раскрытию для буксируемой косы из раскрытой морской сейсморазведочной системы;
[044] фиг. 11В - вид сбоку управляемого крыла согласно настоящему раскрытию для буксируемой косы из раскрытой морской сейсморазведочной системы;
[045] фиг. 12 - вид сбоку компонентов определения местоположения согласно настоящему раскрытию для раскрытой морской сейсморазведочной системы; и
[046] фиг. 13-14 - виды сверху оборудования поперечной связи для раскрытой морской сейсморазведочной системы.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
А. Морская сейсморазведочная система
[047] Морскую сейсморазведочную систему 10 из фиг. 1А, 1В можно использовать в покрытых льдом районах, имеющих ледниковый лед, паковый лед и плавучие льдины. Однако элементы системы 10 можно использовать в других районах, имеющих обломки, плавающий мусор, предметы, сбрасываемые с кораблей, или другие препятствия или преграды на поверхности воды, которые могут сталкиваться с буксируемыми компонентами морской сейсморазведочной системы. В сущности, эту систему 10 и другие, раскрытые в этой заявке, можно использовать в любой окружающей обстановке, а не только в которой имеется тенденция к наличию преград или препятствий, таких как лед. Например, при непогоде, больших волнах, шуме, обычных опасностях и даже нормальных условиях, встречающихся при морских сейсморазведочных работах, можно получать эффект от систем настоящего раскрытия. В соответствии с этим в настоящем раскрытии упоминание покрытых льдом или имеющих препятствия вод означает пояснение.
[048] Например, предпочтительно, чтобы в покрытых льдом районах система 10 включала в себя ледокольное судно 35, которое разрушает лед перед буксирующим судном 30. При работе ледокольное судно 35 разрушает паковый лед и отклоняет плавучие льдины, чтобы образовать полосу для прохождения буксирующего судна 30. Когда буксирующее судно 30 буксирует одну или несколько буксируемых кос 60, от системы 45 энергоснабжения работают источник 90 и система 40 управления, имеющая сейсмический регистратор, в котором регистрируются сейсмические данные, получаемые датчиками 70 на буксируемых косах 60.
[049] При работе буксирующего судна 30 в покрытых льдом или имеющих препятствия водах или даже в случае, когда буксирующее судно 30 работает в нормальных условиях в обычных водах, защитное устройство 50 на буксирующем судне 30 соединено с буксирными тросами 62 и соединено с буксировочными тросами-кабелями 65 и с кабелями 95 жизнеобеспечения, которые поддерживают буксируемые косы 60 и источники 90. (Хотя показаны многочисленные буксируемые косы 60, при желании система 10 может иметь одну буксируемую косу 60). Как рассматривается ниже, защитное устройство 50 (названное в этой заявке скегом) удерживает буксирные тросы и кабели для буксируемых компонентов на расстоянии от поверхности воды, которая в покрытых льдом районах может иметь, например, плавучие льдины, иные препятствия или что-либо подобное в других районах. Скег 50 позволяет судну 30 буксировать буксируемые косы 60 и в то же время справляться с проблемой различных нагрузок, создаваемых перемещениями судна 30, силами от буксируемых объектов и взаимодействиями с возможным льдом, волнами или другими препятствиями.
[050] В общем случае скег 50 можно располагать на судне 30 где угодно. Однако, как лучше всего показано на фиг. 1А, предпочтительно, чтобы скег 50 продолжался от форштевня корпуса судна в кормовой части. Такое расположение в кормовой части лучше подходит для выпускаемых кабелей, буксирных тросов и других компонентов морской сейсморазведочной системы, буксируемой судном 30. В одном компоновке скег 50 является неподвижным дополнением к судну 30, которое на судоремонтном заводе можно приваривать, присоединять или иным образом прикреплять к существующей конструкции корпуса судна. В ином случае судно 30 можно заранее проектировать и строить с подходящим скегом 50, включенным в конструкцию корпуса, или же скег 50 может быть размещаемым компонентом, снабженным соответствующими механизмами для размещения и удержания его на судне 30. В еще одной компоновке скег 50 может быть съемным или независимым компонентом, который можно временно устанавливать на борту судна без необходимости изменения корпуса судна.
[051] Скег 50, продолжающийся ниже ватерлинии судна, удерживает точки крепления буксирных тросов (например, 62), буксировочных тросов-кабелей 65, кабелей 95 жизнеобеспечения 95 и т.д. ниже поверхности воды. Он удерживает буксирные тросы 62 и кабели 65, 95 ниже поверхности воды и на расстоянии от любых предметов (например, любых плавучих льдин, плавающих на поверхности воды, которые могут сталкиваться с буксирными тросами 62, буксировочными тросами-кабелями 65, кабелями 95 жизнеобеспечения и т.д. или собираться около них). Буксировочные тросы-кабели 65, соединенные с сейсмическим регистратором системы 40 управления, протянуты от судна 30, а скег 50 направляет эти буксировочные тросы-кабели 65 буксируемых кос ниже поверхности воды (например, чтобы лед не взаимодействовал с ними или не собирался возле них). Для покрытых льдом или имеющих препятствия районов глубина, необходимая для эффективного удержания буксировочных тросов-кабелей 65 буксируемых кос и присоединенных буксируемых кос 60 ниже любого уровня льда, может зависеть от конкретной реализации. В качестве одного примера скег 50 может продолжаться на расстояние приблизительно 7 м ниже ватерлинии судна 30. Однако в зависимости от ледового режима, в условиях которого судно работает, размера судна и других факторов это расстояние можно изменять применительно к определенной реализации.
[052] В представленной компоновке сейсмический источник 90 подвешен горизонтально в толще воды позади судна 30 и имеет множество элементов 91 сейсмического источника, которыми обычно являются воздушные пушки. (Хотя показан один источник 90, в системе 10 можно использовать многочисленные источники). Питающий или жизнеобеспечивающий кабель 95, соединенный с системой 45 энергоснабжения, протянут от судна 30, и, кроме того, скег 50 направляет этот кабель 95 жизнеобеспечения ниже поверхности воды, так что он находится в стороне ото льда, препятствий, волн, накатов ветровых волн и т.п. Буксирный трос (непоказанный) может соединять кабель 95 жизнеобеспечения со скегом 50 для содействия буксировке источника 90 позади судна 30.
[053] Предпочтительно, чтобы кабель 95 жизнеобеспечения имел нейтральную плавучесть, а источник 90 мог быть стабилизирован одним или несколькими устройствами плавучести или буями 94. Поскольку в покрытых льдом районах лед перемещается по поверхности воды, устройство 94 плавучести можно проектировать с учетом решения проблемы столкновений со льдом, возникающих в случае, когда оно плывет по поверхности. В соответствии с этим устройству 94 плавучести можно придавать определенную форму, чтобы минимизировать соударения со льдом или другими препятствиями, и его можно располагать горизонтально для преодоления любых плавучих льдин или препятствий на поверхности. Однако, как рассматривается более подробно ниже, предпочтительно, чтобы при плавании ниже поверхности устройство 94 плавучести было рассчитано на исключение контакта со льдом или другими препятствиями.
[054] Для буксировки горизонтального источника 90 позади судна 30 можно использовать буксирный трос (непоказанный), прикрепленный к скегу 50 под водой и соединенный с источником 90, подвешенным ниже поверхности воды. Один или несколько поддерживающих тросов соединяют устройство 94 плавучести с источником 90. При работе кабель 95 жизнеобеспечения протянут от конца судна 30, пропущен по каналу в скеге 50 и соединен с источником 90.
[055] В общем случае буксирные тросы 62, буксируемые косы 60, датчики 70, кабели 65/95, система 40 управления и система 45 энергоснабжения могут быть обычными компонентами, известными и используемыми при морской сейсморазведке. Например, элементы 91 источника могут работать любым обычным способом, чтобы формировать подходящий сейсмический сигнал источника. В дополнение к этому для буксируемых кос 60 можно применять кабели с нейтральной плавучестью, используемые для поддержания соответствующих морских сейсмических датчиков 70. По существу, каждая буксируемая коса 60 может иметь несколько секций, при этом каждая имеет внешнее покрытие для защиты внутренней стороны от воды и имеет осевые элементы, расположенные по длине, для придания осевой прочности. Кроме того, каждая секция буксируемой косы 60 может иметь жгут проводов, по которым передается энергия, и провода для передачи данных. В качестве части секций датчики 70 обычно представляют собой гидрофоны, расположенные в буксируемой косе 60.
[056] Как также показано на фиг. 1В, отклонители кос, стабилизаторы или заслонки 64 и тросы 68 разводки могут использоваться для поддержания многочисленных буксируемых кос 60 в трехмерной расстановке 20 позади буксирующего судна 30. Кроме того, эти отклонители 64 кос и тросы 68 разводки могут быть аналогичны обычным компонентам, используемым при морской сейсморазведке, за исключением того, что отклонители 64 кос предпочтительно буксировать ниже поверхности воды, как это рассматривается далее. Наконец, буксируемые косы 60 могут включать в себя устройства 80 управления, расположенные на них, то есть, вдоль длины их и/или на дистальных концах их. Эти устройства 80 управления могут включать в себя хвостовые буйки, гондолы, лопатки, управляемые аппараты и т.п., раскрытые в этой заявке и во включенных путем ссылки патентных заявках.
[057] Поскольку буксирующее судно 30 буксирует сейсмическую расстановку 20 в покрытых льдом или имеющих препятствия водах, при выпуске сейсморазведочных компонентов предпочтительно учитывать возможные проблемы, связанные с плавучими льдинами и т.п., которые могут служить помехой выпуску и выбору буксируемых кос 60 и источников 90. Выпуск и выбор системы можно выполнять, когда буксирующее судно 30 находится на расстоянии от сильного льда. Например, сейсмическую систему можно нормально выпускать до помещения кабелей в скег 50 и погружения различных компонентов.
[058] При типичной реализации буксируемые косы 60 могут быть длиной несколько километров и для выпуска сейсмической системы в разводье может потребоваться значительный участок, который не всегда может быть в покрытых льдом районах. Поэтому желательно иметь возможность выпускать/выбирать раскрытые сейсмические системы на других участках покрытого льдом района, в том числе на участках, имеющих лед.
[059] При движении судно 30 может разрушать лед и/или отодвигать в сторону плавучие льдины, так что узкий участок выпуска будет находиться в его кильватерной струе, где лед может почти отсутствовать. Конечно, это зависит от того, насколько плотно лед сплочен и каким образом его можно пройти. Когда условия позволяют, предпочтительно иметь возможность выпускать и выбирать сейсмические косы 60 из группы на таких чистых участках. Поэтому при разведке в покрытых льдом водах в способах выпуска и выбора предпочтительно использовать такой потенциально чистый участок. В приводимых ниже примерах рассматриваются сейсмические группы нескольких видов, которые можно выпускать и выбирать на таком участке.
[060] На фиг. 1В в сейсмической группе или расстановке 20 использованы буксирные тросы и буксировочные тросы-кабели 65 буксируемых кос, обеспечивающие соединение от скега 50 на судне 30 до головных поплавков 350. Тросами 68 разводки выполнено соединение поперек головных поплавков 350, а буксирные тросы 62 выпущены вместе с отклонителями 64 кос на одном конце.
[061] Хотя в компоновке из фиг. 1В показан один скег 50, для судна 30 можно использовать многочисленные скеги 50 на судне 30, чтобы выпускать буксируемые косы 60. Использование многочисленных скегов 50 может способствовать выпуску и выбору буксируемых кос 60 благодаря разобщению их в компоновке. Хотя в компоновках на фиг. 1А, 1В и в других местах показан один источник, можно использовать многочисленные источники. Кроме того, один источник можно буксировать на обычном месте позади судна 30, тогда как другой источник можно буксировать позади расширенной группы буксируемых кос 60. Этот второй источник можно использовать для получения обратных отсчетов от буксируемых кос 60, которые могут быть предпочтительными при регистрации и анализе данных.
[062] Чтобы лучше регистрировать и отображать получаемые сейсмические данные, во время морской сейсморазведки желательно определять, отслеживать положения буксируемых кос 60 и источника 90 и, возможно, управлять ими. Определение положения можно осуществлять при использовании отсчетов глобальной системы определения местоположения (GPS-отсчетов) для буксируемых кос 60 во время разведки. Это можно делать в некоторых случаях, но в других случаях получение GPS-отсчетов для мест нахождения буксируемых кос 60 может быть невозможным.
[063] Например, в морских сейсморазведочных системах 10 согласно настоящему раскрытию получение GPS-отсчетов может оказываться трудной задачей, поскольку систему 10 погружают значительно ниже поверхности воды, так что приемники глобальной системы определения местоположения (GPS-приемники) не могут выполнять операции по получению отсчетов. Выпускаемые или управляемые устройства 80 нескольких видов можно использовать на буксируемых косах для получения GPS-отсчетов или же регулирования положений буксируемых кос 60 во время разведки. Кроме того, эти способы раскрыты во включенных путем ссылки патентных заявках. Согласно другим способам сейсморазведку можно проводить при незамкнутом ходе без получения GPS-отсчетов для буксируемых кос 60. Эти способы также раскрыты во включенных путем ссылки заявках. Подробности, относящиеся к обоим этим способам, не повторяются в этой заявке ради краткости изложения.
[064] С учетом понимания раскрытой системы 10 теперь рассмотрение будет обращено к конкретным компонентам системы, начиная со скега.
В. Конструкции скега
[065] Как рассматривалось выше, на буксирующем судне 30 скег 50 используется для удержания буксирных тросов 62 и кабелей 65/95 ниже поверхности воды (например, на расстоянии от плавучих льдин или чего-либо подобного). Как показано на фиг. 2А, скег 100 согласно одному варианту осуществления установлен в кормовой части или на корме 32 сейсмического буксирующего судна 30, используемого для буксировки сейсмических буксируемых кос (непоказанных). Как отмечалось ранее, скег 100 может быть установлен на судне 30 где угодно, включая левый борт, правый борт, нос или шахту для спуска и подъема оборудования в корпусе. Однако, предпочтительной является кормовая часть или корма 32 судна 30, поскольку буксируемые косы (непоказанные) лучше всего буксировать позади судна 30, и это может способствовать уклонению от волн, плавучих льдин или чего-либо подобного при буксировке буксируемых кос.
[066] В этом варианте осуществления скег 100 представляет собой один кабелепровод, продолжающийся от кормовой части 32 судна 30. Чтобы существенно не мешать управлению судном и осуществлению других функций, предпочтительно использовать этот скег 100 в виде одного кабелепровода на судне 30, имеющем два гребных винта 36, хотя его можно использовать на судах других типов. Скег 100 продолжается ниже корпуса между слипами 34, используемыми для выпуска и выбора буксируемых кос и кабелей. На всем протяжении кормовой или задней части в скеге 100 образован открытый проход или канал 120 для пропускания кабелей буксируемых кос, кабелей источника и ходовых концов, рассматриваемых ниже.
[067] Даже хотя скег 100 продолжается от кормовой части 32, при разведке в покрытых льдом водах лед может втягиваться в поток вдоль днища корпуса судна. Этот втягиваемый лед в конечном счете достигает кормовой части 32 судна 30, где он снова всплывает. В других ситуациях лед, сталкивающийся с носовой частью судна 30, может втягиваться под корпус судна и затем пытаться всплыть около кормовой части 32, когда судно 30 движется вперед. В любом случае скег 100 действует как защитный кабелепровод, удерживая буксирные тросы, кабели и т.п. на расстоянии от этого льда.
[068] На своем дистальном конце скег 100 может иметь основание или пластину 110, на которой для буксирных тросов предусмотрены точки 114/116а-b крепления. Таким образом, на скеге 100 предусмотрены точки 114/116а-b буксировки ниже поверхности воды (и на расстоянии от плавучих льдин на поверхности). Кроме того, в дополнение к остальной защите эти находящиеся под поверхностью точки 114/116а-b буксировки способствуют поддержанию буксируемых кос и источника ниже поверхности.
[069] В уже описанном скеге 100 предусмотрен один кабелепровод, направленный вниз от центра кормовой части 32 судна, который может лучше всего подходить для судна 30 с двумя гребными винтами 36. В качестве варианта скег 100 из фиг. 2В образован двумя или большим количеством кабелепроводов или проходов 120, направленных вниз от кормовой части 32 судна, и может использоваться на судне 30, имеющем один или несколько гребных винтов 36 и один или два руля 37.
[070] Два канала 120А-В проходят от кормовой части 32 судна 30 и под поверхность воды по каждую сторону от гребного винта 36 судна. Таким образом, кильватерная струя от гребного винта 36 и руль 37 судна 30 могут оставаться относительно не перекрытыми в открытом пространстве между каналами 120А-В.
[071] Пластина 110 основания на переднем конце соединена с килем судна 30. Как и в предыдущих конструкциях, пластина 110 основания имеет точки буксировки для прикрепления буксирных тросов, используемых для поддержания буксируемых кос и источника сейсмической системы. Например, эти точки буксировки могут располагаться вдоль заднего края пластины 110. В дополнение к этому точки прикрепления кабелей в каналах 120А-В также предусмотрены на заднем краю пластины 110.
[072] В предыдущих примерах скег имел точки буксировки, которые были фиксированными. В качестве варианта на фиг. 2C, 2D показаны компоновки скега 100, имеющего регулируемые точки буксировки для присоединения буксирных тросов. На фиг. 2С основание 110 скега имеет пазы или места 115 соединения, которые позволяют регулировать положение или автоматически регулировать положение по горизонтали на основании 110 соединительных элементов 67 на одном конце буксирных тросов 62. На фиг. 2D основание 110 скега имеет пазы или места 117 соединения на стабилизаторах или турелях 119, которые позволяют регулировать положение или автоматически регулировать положение по вертикали на основании 110 соединительных элементов 67 на конце буксирных тросов.
[073] Как показано, при автоматическом регулировании положения пазы или места 115 и 117 соединения могут обеспечивать свободное движение соединительных элементов 67. Действительное положение буксирных тросов 62 можно регулировать в другом месте системы при использовании любого из различных устройств, раскрытых в этой заявке. Вместо протяженных пазов или мест 115 и 117 соединения можно иметь некоторое количество предварительно сконфигурированных заданных положений для предварительной регулировки буксирных тросов 62. Кроме того, регулирование положений как по вертикали, так и по горизонтали точек буксировки на скеге 100 может быть достигнуто сочетанием элементов из обеих фигур, фиг. 2C, 2D. По существу, вертикальный стабилизатор или турель 119 с вертикальным пазом или местом 117 соединения можно перемещать или фиксировать в горизонтальном пазу или на месте 115 соединения основания 110. Кроме того, при сочетании элементов точки буксировки для буксирных тросов 62 можно регулировать как по вертикали, так и по горизонтали.
[074] На фиг. 3А-3В показано другое судно 30 согласно настоящему раскрытию, имеющее один или несколько скегов 100, продолжающихся, как и раньше, от его кормовой части. В данном случае показаны два скега (один на стороне левого борта и другой на стороне правого борта), но можно использовать большее или меньшее количество. Эти скеги 100 также имеют регулируемые точки буксировки.
[075] Каждый скег 100 включает в себя кабелепровод 120 для пропускания буксировочных тросов-кабелей буксируемых кос и кабелей источника (непоказанных). Каждый из скегов 100 имеет одну или несколько челночных тележек или подъемников 140А-В, перемещаемых на протяжении или вдоль этих кабелепроводов 120, которые могут иметь одну или несколько точек 142 буксировки. Одна или несколько челночных тележек 140А-В могут перемещаться к верху и низу кабелепроводов 120 при использовании шкивных систем 150А-В для подъема и опускания челночных тележек 140А-В и их точек 142 буксировки.
[076] Как отмечалось ранее, скеги 100 защищают сейсмическое оборудование, продвигая его ниже поверхности воды (например, когда на ней находится лед). В дополнение к этому скеги 100 содействуют перемещению точек 142 буксировки сейсмической расстановки (20) на заданную глубину на уровне или ниже киля судна. Челночные тележки 140А-В могут придавать расстановке (20) сейсмической системы дополнительную устойчивость и могут обеспечивать нахождение точек 142 буксировки буксируемых кос, источников и других кабелей на или вблизи заданной глубины погружения системы ниже поверхности воды.
[077] На фиг. 3А, 3В каждый из скегов 100 имеет две челночные тележки 140А-В, которые могут независимо перемещаться вверх и вниз по рельсам 130, расположенным на кабелепроводах 120. Каждая челночная тележка 140А-В имеет одну или несколько точек 142 буксировки, которые могут включать в себя отверстия, блоки или другие соединители для присоединения буксирных тросов (непоказанных) и т.п. сейсмической системы, выпускаемой, буксируемой и выбираемой с судна 30.
[078] Для иллюстрации челночные тележки 140А-В показаны в двух крайних положениях, одном верхнем положении около палубы судна и другом нижнем положении около основания 110 скега. В действительности каждый скег 100 может иметь только один набор челночных тележек 140А-В, которые могут перемещаться с помощью шкивных систем 150А-В между этими верхним и нижним положениями. Однако в других компоновках каждая шкивная система 150А-В может использоваться для перемещения многочисленных наборов челночных тележек 140 или большего количества челночных тележек 140 по рельсам 130.
[079] На фиг. 3С скег 100 показан с челночными тележками 140А-В, расположенными бок о бок, чтобы они могли перемещаться относительно друг друга с помощью соседних шкивных систем 150А-В. На фиг. 3D челночные тележки 140А-В расположены на скеге 100 последовательно и могут перемещаться относительно друг друга с помощью внутренней и внешней шкивных систем 150А-В.
[080] Челночные тележки 140А-В на скегах 100 из фиг. 3A-3D позволяют операторам поднимать на борт буксируемые косы и источники отдельно и/или независимо. Для возвращения нижней, расположенной последовательно челночной тележки 140А и выбора соединенных с ней буксирных тросов из фиг. 3D требуется одновременное возвращение в прежнее положение другой расположенной последовательно челночной тележки 140В, даже несмотря на то, что челночные тележки 140А-В могут перемещаться отдельно. Ввод в действие этих челночных тележек 140А-В из фиг. 3D может быть последовательным или одновременным. В противоположность этому соседние челночные тележки 140А-В из фиг. 3С могут быть перемещены отдельно и могут быть введены в действие и возвращены независимо, и этим в полевых условиях можно получать ряд преимуществ.
[081] Обратимся к фиг. 4А-4С, на которых раскрыты дополнительные подробности относительно скега 100, такого как на фиг. 3С. На фиг. 4А показан вид сверху скега 100, имеющего расположенные рядом челночные тележки 140А-В, на фиг. 4В показан детализированный вид шкивных систем 150А-В и на фиг. 4С показан детализированный вид конца скега 100. Хотя эти подробности представлены для такого скега 100, как на фиг. 3С, аналогичные подробности имеют отношение к скегу 100 из фиг. 3D.
[082] Каждая челночная тележка 140А-В перемещается ее соответствующей шкивной системой 150А-В, а челночные тележки 140А-В перемещаются на протяжении прохода 122 кабелепровода, который отделен от рельсового пути челночных тележек перегородкой или стенкой 124. Одна челночная тележка 140А может быть больше, чем другая челночная тележка 140В, и может иметь дополнительные точки 142 буксировки, хотя могут использоваться другие конфигурации. Например, внутренняя челночная тележка 140В, установленная на внутренней стороне скега 100, может использоваться для буксировки источников. Наружная челночная тележка 140А, установленная на внешней стороне скега 100, может использоваться для буксировки буксируемых кос и отклонителей кос. Для буксирных тросов отклонителей кос и других тросов забортной буксировки в точке 142 буксировки может использоваться узел 144 вертлюга и шкива.
[083] Как показано на фиг. 4В, 4С, в шкивных системах 150А-В используются верхний и нижний ролики и стальные тросы. Для верхних роликов могут быть использованы электродвигатели (непоказанные) для перемещения тросов и челночных тележек 140А-В. Для содействия перемещению челночных тележек 140А-В по рельсам 130, нижние фрикционные планки 132, образованные из нейлона или чего-либо подобного, могут быть установлены по обеим сторонам челночной тележки 140А-В.
[084] Когда челночные тележки 140А-В поднимают и опускают или останавливают на месте на скеге 100, края рельсов 130 удерживают челночные тележки 140А-В и обеспечивают поддержание буксирных тросов сейсмической системы горизонтальными позади судна 30. При необходимости дополнительные стопорные или тормозные элементы можно использовать для фиксации по вертикали челночных тележек 140А-В на рельсах 130. Кроме того, во время работы блокированием шкивных систем 150А-В можно удерживать челночные тележки 140А-В по вертикали.
С. Трехмерная сейсмическая система, буксируемая ниже поверхности
[085] На фиг. 5А показан перспективный вид дополнительных компонентов раскрытой сейсморазведочной системы 10 согласно настоящему раскрытию. Система 10 включает в себя один или несколько скегов 100 в кормовой части судна 30. Во время разведки один или несколько скегов 100 буксируют расстановку или группу 20 из многочисленных буксируемых кос 60 и буксируют один или несколько источников 200 позади судна 30. Скег 100 удерживает кабели и буксирные тросы для этих сейсмических компонентов ниже поверхности воды, чтобы систему 10 можно было использовать при сейсмической разведке в покрытых льдом районах, водах с турбулентными потоками или аналогичных. Как отмечалось выше, скег 100 может иметь независимо движущиеся челночные тележки и точки буксировки, чтобы операторы могли раздельно выпускать и выбирать буксируемые косы 60 и источники 200.
[086] Как отмечалось в этой заявке, при использовании системы 10 в районах, в которых на поверхности скапливается лед, или в условиях штормовой погоды, когда буксировка ниже действия волн может улучшать регистрацию, компоненты расстановки 20 буксируют ниже поверхности воды. Чтобы делать это, для буксируемых кос 60, источников 200 и отклонителей 400 кос, для всех них, используют устройства плавучести, чтобы поддерживать их на заданном уровне ниже поверхности воды.
[087] Один или несколько источников 200, в которых могут использоваться группы воздушных пушек или чего-либо подобного, выпускают позади судна 30 и обычно перед расстановкой 20. Источники 200 буксируют, используя кабели 204 и буксирные тросы (непоказанные) от скега 100, которые тянут источники 200 ниже поверхности воды. Один или несколько источников 200 отстоят от расстановки 20 буксируемых кос и имеют устройства плавучести, более подробно описываемые ниже. Кроме того, при использовании способов, таких как раскрытые во включенных путем ссылки патентных заявках, источники 200 могут быть активно управляемыми.
[088] Буксируемые косы 60 выпускают с образованием расстановки 20, используя буксировочные тросы-кабели 65 (и необязательно буксирные тросы (непоказанные)), продолжающиеся от скега (скегов) 100 ниже поверхности воды. Буксирные тросы 62 и направляющие стропы 63 соединены с отклонителями 400 кос, а отводные тросы 66 соединяют отклонители 400 кос с тросами 68 разводки, которые продолжаются от края до края буксируемых кос 60 вблизи головных поплавков 350. Во время работы отклонители 400 кос удерживают внешние края буксируемых кос 60, расширенных в расстановке 20.
[089] Буксируемые косы 60 включают в себя головные поплавки 350 на переднем конце буксируемых кос 60. Головные поплавки 350 встроены для сведения до нейтрального сосредоточенного груза буксировочных тросов-кабелей 65 буксируемых кос 60 и тросов 68 разводки. В продолжение за пределами головных поплавков 350 каждая буксируемая коса 60 имеет некоторое количество сейсмических датчиков 70, устройство 80 управления и другое оборудование для определения местоположения и измерений, рассматриваемое ниже. Кроме того, при необходимости дополнительные поплавки 350 можно использовать на различных местах буксируемой косы 60.
[090] В качестве варианта использованию головных поплавков 350 плавучесть можно распределять по буксировочному кабелю-тросу 65 в виде плавучего модуля изоляции вибрации или же нанесенного снаружи плавучего покрытия. Сила плавучести на любом из этих объектов может быть либо статической, либо активной.
[091] Отклонители 400 кос образованы с нейтральной плавучестью или имеют устройства 406 плавучести, описываемые ниже. В качестве буксирных тросов 62 для отклонителей 400 кос предпочтительно использовать тросы, которые имеют по существу нейтральную плавучесть. Например, буксирные тросы 62 отклонителей кос могут быть тросами из полиэтилена с высоким модулем упругости (ПВМУ) или другого материала.
[092] Поскольку систему 10 буксируют ниже поверхности воды, различные физические факторы из числа лобового сопротивления, плавучести, веса и другие факторы оказывают влияние на глубину погружения и поведение системы 10 под водой. В этой связи выполняют гидродинамическое моделирование требуемой системы 10, чтобы понять зависимости между силами буксировки и силами лобового сопротивления, плавучестью и весом и другими факторами для каждого компонента системы 10 и как они работают совместно. Некоторые компоненты системы 10 проектируют с нейтральной плавучестью, тогда как другие компоненты проектируют для компенсации веса дополнительного обычного оборудования. Каждый из компонентов плавучести предпочтительно образовывать из синтактического или иного несжимаемого пенопласта, чтобы при управлении системой плавучесть оставалась относительно постоянной в зависимости от глубины.
[093] На фиг. 5В на блок-схеме последовательности действий показан способ 300 проектирования трехмерной расстановки системы с нейтральной плавучестью, который включает в себя этапы моделирования и выработки решений, которые необходимо принимать при конфигурировании расстановки. С иллюстративной целью могут делаться обращения к системе 10 из фиг. 5А, но способ 300 можно применять к любой конфигурации. Фактически, конфигурация буксируемого сейсмического оборудования, например, заданный размер трехмерной расстановки 20, количество буксируемых кос 60, количество приемников 70, количество источников 200, протяженности буксируемых кос 60 и т.д., и конкретные виды используемого оборудования в основном определяются реализацией и предполагаемым использованием сейсмической системы 10. Как следует понимать специалисту в данной области техники, эти и аналогичные соображения будут составлять часть раскрываемого способа 300, но в этой заявке они не детализируются.
[094] Получив правильное представление о буксируемых компонентах для конкретной конфигурации требуемой расстановки 20, операторы измеряют или оценивают (блок 302) вес при погружении всех буксируемых сейсмических компонентов расстановки 20 и измеряют или оценивают (блок 304) лобовое сопротивление при погружении для всех буксируемых компонентов расстановки 20 при одной или нескольких (и предпочтительно различных) скоростях буксировки. Представляющие интерес скорости буксировки являются ожидаемыми или планируемыми скоростями буксировки сейсмическим судном 30 при прохождении линий наблюдения во время разведки. Определение веса и лобового сопротивления при погружении буксируемых компонентов может включать или может не включать в себя результаты для поплавков, уже включенных в некоторые компоненты.
[095] Используя способ гидродинамического моделирования, такой как имеющийся в программном средстве, операторы моделируют гидродинамические силы требуемой расстановки 20 и вычисляют (блок 306) силы лобового сопротивления в зависимости от плавучести, необходимые для поддержания нейтральной плавучести всех буксируемых компонентов при одной или нескольких заданных скоростях в воде. Например, при проектировании системы 10 численный гидродинамический анализ выполняют относительно требуемой трехмерной расстановки 20 буксируемых кос, чтобы понять силы, действующие на все составные части погруженных буксируемых компонентов. Один конкретный программный продукт или алгоритм гидродинамического моделирования, который можно использовать при этих вычислениях, включает в себя OrcaFlex, поставляемый Orcina Ltd. из Великобритании, хотя можно использовать другие продукты. Плавучие компоненты (поплавки источников, головные поплавки 350, поплавки 406 отклонителей кос и т.д.), прикрепленные к источникам 200, буксировочным тросам-кабелям, отклонителям 400 кос и т.д. или используемые на них, могут быть частью этого моделирования.
[096] После того как моделирование выполнено, на основании полученных моделированием гидродинамических сил и вычисленных сил в зависимости от плавучести операторы конфигурируют (блок 308) степень способности к всплыванию, которую необходимо добавить в расстановку 20 для поддержания нейтральной плавучести всех буксируемых компонентов. Конфигурирование способности к всплыванию включает в себя встраивание дополнительных синтактических поплавков для буксируемых компонентов и/или включение распределенной по компонентам плавучести в расстановку 20. Синтактические поплавки и/или включенные распределенную по компонентам плавучесть конфигурируют для расстановки 20, чтобы выполнить компенсацию за влияние весов буксируемых компонентов и буксировочных усилий. Поскольку может иметься необходимость в регулировке расстановки 20 в полевых условиях или же для соответствия конкретной реализации, предпочтительно, чтобы сконфигурированная способность к всплыванию допускала наличие плавучести, регулируемой для учета изменчивости весов компонентов и буксировочных усилий для заданных размера и геометрии расстановки 20.
[097] Например, плавучие компоненты (то есть, поплавки) для расстановки 20 конфигурируют, чтобы удовлетворить требованиям по плавучести в каждой точке прикрепления, чтобы нейтрализовать веса компонентов системы и силы на них. Чтобы регулировки можно было выполнять в полевых условиях, при конфигурировании этих плавучих компонентов предпочтительно делать их плавучесть подстраиваемой в пределах нескольких процентов полученной моделированием нормы. Как отмечалось ранее, предпочтительно, чтобы устройства плавучести, используемые для плавучих компонентов, были синтактического типа, вследствие чего при разных глубинах погружения не будет изменяться плавучесть, присущая компонентам, вследствие изменения гидростатических давлений. Кроме того, этим расширяется диапазон рабочих глубин, на которых расстановка 20 буксируемых кос может работать при глубинных буксировках.
[098] После этого, имея сконфигурированные поплавки для расстановки 20, операторы измеряют или оценивают (блок 310) лобовое сопротивление всех поплавков и повторно выполняют (блок 312) гидродинамическое моделирование трехмерной расстановки 20 на основании результатов измерения лобового сопротивления. Это делают по той причине, что сконфигурированная способность к всплыванию может настолько изменить динамику расстановки 20, что переменные будет необходимо оценивать повторно.
[099] Как отмечалось выше, предпочтительно, чтобы плавучесть добавленных и распределенных устройств плавучести можно было регулировать для учета изменчивости весов и буксировочных усилий компонентов. Поэтому на данном этапе может быть сделана количественная оценка для определения, является ли достаточной регулируемость плавучести, достижимая в поплавках, чтобы при необходимости можно было выполнять регулировку в полевых условиях (решение 314). Если плавучестью поплавков не обеспечивается заданный диапазон регулируемой плавучести, в способе 300 возвращаются к предшествующим этапам, выполняя встраивание и распределение (блок 308) добавленной плавучести для весов и буксировочных усилий буксируемых компонентов, чтобы повысить общую регулируемость плавучести расстановки. Предпочтительно, чтобы регулируемая плавучесть, которую расстановка будет иметь, могла зависеть от конкретной реализации и ряда факторов. В общем случае предпочтительно, чтобы каждый из различных поплавков обладал регулируемостью плавучести порядка ±100 кг (всего 200 кг), чтобы окончательная плавучесть находилась в пределах ±25 кг (всего 50 кг). В таком случае несколько гондол можно использовать для компенсации ±25 кг балансировочного отклонения.
[100] В случае, если достаточная регулируемость плавучести уже сконфигурирована в способности к всплыванию расстановки 20, компоновку буксируемых компонентов в сейсмической расстановке можно проектировать со сконфигурированной способностью к всплыванию (то есть, с поплавками) для конкретных буксируемых компонентов, сосредоточенных нагрузок и т.п., чтобы расстановка 20 могла буксироваться и оставаться нейтрально плавучей во время работ.
[101] Как можно ожидать, рабочие параметры и условия могут изменяться во время разведки и предпочтительно рассчитывать и проектировать расстановку 20 в соответствии с такими изменениями. Для этого после конфигурирования способности к всплыванию с заданной регулируемостью (решение 314) операторы моделируют (блок 316) уравновешивающие силы, которые необходимы для поддержания буксируемых кос 60 на требуемой глубине в связи с отклонениями от заданной целевой скорости буксировки, изменениями курса, морскими течениями, окружающими условиями, соленостью воды, температурой воды и т.п. И в этом случае гидродинамическое моделирование можно выполнять, используя программное средство гидродинамического моделирования с входными данными для полученной моделированием трехмерной расстановки 20, а также с переменными, такими как ожидаемые вариации скорости буксировки, предполагаемые изменения курса, ожидаемые морские течения и другие такие параметры и условия. Например, гидродинамическое моделирование можно выполнять в пределах диапазона ожидаемых скоростей буксировки (например, 2-6 узлов (3,704-11,112 км/ч), чтобы понять зависимость переменного лобового сопротивления от сосредоточенных нагрузок для конкретных используемых компонентов.
[102] Вычисляемые уравновешивающие силы представляют собой корректировочные силы, которые должны создаваться компонентами расстановки 20 для учета отклонений различных переменных во время работ, чтобы расстановку 20 можно было буксировать и при желании поддерживать на глубине разведки. На основании вычисленных уравновешивающих сил операторы определяют (блок 318) размер и количество активных поверхностей 80, подлежащих добавлению к расстановке 20, для получения надлежащих уравновешивающих сил, чтобы компенсировать ожидаемую изменчивость. Эти активные поверхности 80 могут включать в себя устройства управления, подводные крылья и т.п., раскрытые в этой заявке. Такие активные поверхности 80 предпочтительно добавлять в головную часть расстановки 20 на передние концы буксируемых кос 60, и они могут делать более простыми регулирование и работу системы 10, хотя для активных поверхностей 80 можно использовать другие места. (В зависимости от обстоятельств может возникать необходимость измерения или оценивания лобового сопротивления всех активных поверхностей 80 и повторное выполнение гидродинамического моделирования трехмерной расстановки на основании результатов измерения лобового сопротивления).
[103] Активные поверхности 80 можно использовать для компенсации ожидаемых вариаций скорости и других переменных. Некоторые активные поверхности 80 могут быть стандартными кабельными гондолами или могут быть модифицированными активными устройствами с более значительными поверхностями крыльев и прикладываемой силой, зависящей от уровня ожидаемой изменчивости. В зависимости от ожидаемого уровня изменчивости глубины несколько этих активных поверхностей 80 предпочтительно размещать вблизи головных поплавков 350 буксируемых кос (то есть, в секции натяжения).
[104] В заключение сейсмическую расстановку 20 образуют с компоновкой плавучих компонентов (например, поплавков источников, головных поплавков 350, поплавков 406 отклонителей кос и т.д.) и активных поверхностей 80. После образования всю расстановку 20 буксируемых кос можно буксировать полностью погруженной без необходимости в ориентирующих средствах на поверхности. В случае выпуска в воду расстановки 20 с приемлемым диапазоном подстраиваемой плавучести активные поверхности 80 можно в дальнейшем подстраивать под любые флуктуации скорости, курса, окружающих условий, солености воды, температуры воды, морского течения и т.п.
D. Управление плавучестью
[105] Чтобы управлять плавучестью системы 10, для источника 200 можно использовать систему плавучести, показанную и рассмотренную с обращением к фиг. 6, 7 и 8А-8D. Для буксируемых кос 60 можно использовать систему плавучести, показанную и рассмотренную с обращением к фиг. 6 и 9А, 9В. Для отклонителей 400 кос можно использовать систему плавучести, показанную и рассмотренную с обращением к фиг. 10А, 10В. Наконец, для буксируемых кос 60 можно использовать устройства управления, показанные и описанные с обращением к фиг. 11А, 11В.
1. Поплавки источника
[106] Сначала обратимся к управлению плавучестью источника 200. На фиг. 6 показана часть судна 30 со скегом 100, имеющим челночную тележку 140 согласно настоящему раскрытию. На этом виде сбоку скег 100 показан буксирующим источник 200 и буксируемую косу 60 трехмерной расстановки (20 на фиг. 5А).
[107] Для источника 200 применяют систему плавучести, чтобы поддерживать компонент 210 источника, буксируемого судном 30 на кабеле 204 жизнеобеспечения от скега 100. Компонент 210 источника может быть сейсмическим источником, воздушной пушкой, электромагнитным источником, магнитным источником, гидролокационным устройством, устройством генерации звука или построения изображения или другим буксируемым компонентом. Другие источники 200 также можно использовать в системе 10.
[108] В системе плавучести источника 200 используют некоторое количество поплавков или буев 220 и 250, соединенных друг с другом. По меньше мере один из поплавков 220 является управляемым по глубине погружения, и это означает, что плавучесть поплавка 220 является активно управляемой. Например, этот поплавок 220 может иметь глубину погружения в водной толще, автоматически регулируемую на поплавке 220 и/или оперативно регулируемую с блока 40 управления на судне. Экраны пользовательского интерфейса для мониторинга управляемого по глубине погружения поплавка 220 могут быть доступны на мониторе, соединенным с блоком 40 управления на судне. Таким образом, операторы на судне 30 могут использовать экраны для мониторинга работы управляемого по глубине погружения поплавка 220 и считывания измеряемых параметров, таких как глубина погружения, давление воздуха, влажность, температура и т.д. Кроме того, при работе операторы на судне 30 могут регулировать рабочие параметры поплавка 220, например изменять управляемую глубину погружения. Это может быть особенно полезно при внесении изменений в сейсмические работы или при погружении источника 200 на большую глубину в водной толще, чтобы избежать препятствий на поверхности.
[109] Один или несколько дополнительных поплавков или буев 250 системы плавучести источника имеют регулируемую плавучесть и привязаны к управляемому по глубине погружения поплавку 220. Эти поплавки 250 с регулируемой плавучестью имеют плавучесть, полученную моделированием и предварительно сконфигурированную до размещения в конкретной реализации. Например, плавучесть каждого из этих поплавков 250 конфигурируют для буксируемых компонентов или части буксируемых компонентов, и каждый поплавок 250 на его месте в системе 10 используют для поддержания ожидаемых значений скорости буксировки, сил лобового сопротивления и т.д.
[110] Как показано, по меньшей мере один управляемый по глубине погружения поплавок 220 предпочтительно располагать на одной линии с одним или несколькими дополнительными поплавками 250, привязанными позади и предназначенными для следования за первым поплавком 220. Предпочтительно, чтобы соединения 226 между каждым из поплавков 220 и 250 были гибкими и позволяли различным поплавкам 220 и 250 перемещаться относительно друг друга.
[111] Можно использовать другие конфигурации. Например, как показано на фиг. 6, еще один управляемый по глубине погружения поплавок 220 можно располагать на конце набора регулируемых поплавков 250. В соответствии с этим система плавучести источника 200 может иметь один или несколько управляемых по глубине погружения поплавков 220 и один или несколько регулируемых поплавков 250 в любой заданной компоновке.
[112] Одна или несколько линий 209 от питающего кабеля 204 соединены с одним или несколькими управляемыми по глубине погружения поплавками 220. Рабочая текучая среда от источника 45 рабочей текучей среды на судне 30 передается по питающему кабелю 204 и линиям 209 к поплавкам для 220 для заполнения внутренних объемов. Предпочтительно, чтобы рабочей текучей средой был сжатый воздух, но можно использовать другие газы. Кроме того, рабочая текучая среда может быть жидкостью легче воды. Все же не следует выпускать жидкость в морскую среду кроме тех случаев, когда это делать безопасно. Поэтому в некоторых компоновках обратная линия (непоказанная) от поплавков 220 может проходить обратно к источнику 45 на судне 30.
[113] По сути дела, каждый из одного или нескольких поплавков 220 имеет контроллер (непоказанный), который регулирует рабочую текучую среду (воздух), содержащуюся в поплавках 220 и управляет плавучестью поплавков в водной толще. Таким образом, поплавки 220 могут поддерживаться на заданном уровне и при необходимости могут переводиться на другие уровни. Это позволяет не только поплавкам 220 не подвергаться воздействию препятствий на поверхности или волн, если они имеются, но поплавки 220 могут поддерживать буксируемые компоненты 210 на соответствующей глубине, на которой может упрощаться регистрация данных, рассматриваемая в этой заявке. В дополнение к этому при буксировке поплавки 220 могут отводить буксируемый компонент 210 источника на большую глубину для уклонения от любых препятствий на поверхности воды, таких как гряды торосистого льда и т.п.
[114] Теперь обратимся к фиг. 7, на которой более подробно показан вариант осуществления системы плавучести источника 200 из фиг. 6. Как отмечалось выше, система имеет один или несколько управляемых по глубине погружения поплавков 220 и один или несколько регулируемых поплавков 250, привязанных друг к другу привязными тросами 226. Как и прежде, систему можно буксировать позади судна (непоказанного) на кабеле 204 жизнеобеспечения, соединенном со скегом судна (непоказанным), и систему можно использовать для поддержания буксируемого компонента и можно соединять через питающую линию 205 с источником 45 рабочей текучей среды на судне 30.
[115] В этом варианте осуществления буксируемый компонент 210 источника представляет собой группу воздушных пушек 212, буксируемую в воде и соединенную кабелем 204 жизнеобеспечения и линией 205 подачи воздуха с источником 45 сжатого воздуха на судне (непоказанном). В представленном примере каждый из этих поплавков 250 может иметь плавучесть, предварительно сконфигурированную для уравновешивания веса в воде соответствующей воздушной пушки 252, которую поплавок 250 поддерживает в группе воздушных пушек 212.
[116] Управляемый по глубине погружения поплавок 220 соединен с кабелем 204 жизнеобеспечения привязным тросом 222, и каждый поплавок 220 и 250 поддерживает участки группы 210 воздушных пушек с помощью привязных тросов 216. Отводная линия 209 от линии 204 подачи воздуха соединена с управляемым по глубине погружения поплавком 220, и по ней подается сжатый воздух, необходимый для управления глубиной DF погружения поплавков 220 и 250, а значит, и глубиной DS погружения компонента 210 источника во время работы, подробно описываемой ниже. Конкретные детали управляемого по глубине погружения поплавка 220 системы раскрыты во включенных путем ссылки патентных заявках и не повторяются в этой заявке.
[117] На фиг. 8А-8D показаны вид сбоку, вид с пространственным разделением деталей и два вида в разрезе регулируемого поплавка 250 системы из фиг. 7. Регулируемый поплавок 250 включает в себя торцевые крышки 260А-В и основную часть 270. Стропы 254, образованные из металла, расположены на основной части 270. Стропы 254 для регулируемого поплавка 250 могут быть цельными, как показанные, и могут иметь резину, соединенную с внутренней поверхностью.
[118] Торцевые крышки 260А-В прикреплены к концам основной части 270 с использованием стяжных стержней 252, которые проходят по периферии основной части 270 и присоединяют торцевые крышки 260А-В к каждому концу основной части 270.
[119] Каждая торцевая крышка 260А-В имеет внешнюю оболочку 262, заполненную пенопластом 264 или другим плавучим материалом. Центральные стяжные стержни 266 с ушками на концах для соединения с привязными тросами расположены на торцевых крышках 260А-В и соединены с металлическими пластинами 263 на внутренней поверхности торцевых крышек 260А-В, которые опираются на основную часть 270. Предпочтительно, чтобы стяжной стержень 266 имел сварной элемент 268 для содействия скреплению пенопласта 264 в торцевой крышке 260А-В со стяжным стержнем 266.
[120] Предпочтительно, чтобы снаружи торцевые крышки 260А-В имели защитные износостойкие пластины на местах, где ушки стяжных стержней 266 отходят от торцевых крышек 260А-В. Поплавок 250 соединяют с другими поплавками, используя буксирные ушки на концах стяжных стержней 266, а заданное устройство, подлежащее поддержанию поплавком 250 (например, одну из воздушных пушек), соединяют с монтажными петлями на стропах 254. Подъемные кольца на стропах 254 используют для подъема поплавка во время установки и т.п.
[121] Основная часть 270 имеет внешнюю оболочку 272, окружающую плавучий материал 274, который может быть пенопластом с кажущейся плотностью 29 фунт/фут3 (0,046 г/см3). Вместо воздушного резервуара основная часть 270 имеет полый сердечник 276, в котором удерживаются множество элементов 280 плавучести и/или прокладок 290. Каждый из элементов 280 плавучести имеет пенопластовый вкладыш, окруженный подкрепляющим ободом. Пенопластовый вкладыш 282 может быть образован из пенопласта с кажущейся плотностью 29 фунт/фут3 (0,046 г/см3), а обод 284 может быть деталью из пластического материала. Прокладки 290 не имеют пенопласта и вместо этого представляют собой просто кольца с нейтральной плавучестью, которые могут быть изготовлены, например, из отрезков трубы из полиэтилена высокой плотности с наружным диаметром 18 дюймов (45,72 см) и длиной 7,75 дюйма (19,685 см).
[122] Силу плавучести, создаваемую поплавком 250 при размещении в воде, можно регулировать или подстраивать, используя элементы 280 плавучести и прокладки 290. Например, одну из торцевых крышек 260А-В (или обе) можно снимать с основной части 270 и полый сердечник основной части 270 можно заполнять в требуемом соотношении элементами 280 плавучести и прокладками 290. Если желательной является минимальная плавучесть, полый сердечник основной части можно оставлять пустым. Повышенную плавучесть можно получать добавлением элементов 280 плавучести и заполнением любого оставшегося пространства нейтральными прокладками 290. Для полной плавучести полый сердечник основной части 270 можно полностью заполнять элементами 280 плавучести.
[123] Например, полый сердечник 276 может иметь пространство для семи элементов. Максимальная плавучесть может составлять 670 фунтов (303,9 кг) в случае заполнения всех пространств элементами 280 плавучести. Она соответствует максимальному весу воздуха около 1030 фунтов (467,2 кг). В таком случае значения промежуточной плавучести для поплавка 250 могут находиться в диапазоне от около 630 фунтов (285,76 кг) (шесть элементов 280 плавучести и одна прокладка 290) до около 425 фунтов (192,77 кг) (один элемент 280 плавучести и шесть прокладок 290) с промежуточными значениями между ними. Минимальная плавучесть может составлять 389 фунтов (176,4 кг), когда полый сердечник 276 пустой. Следует понимать, что конфигурация внутренних пространств, рассмотренная выше, предполагается примерной и может быть иной для определенной реализации.
[124] Плавучесть каждого из регулируемых поплавков 250 из фиг. 7 конфигурируют под конкретную воздушную пушку или часть группы источников, для поддержания которой размещают поплавок 250. Пушку взвешивают в воде или ее вес в воде вычисляют. Затем плавучесть поплавка 250 конфигурируют, чтобы уравновесить вес в воде поддерживаемой пушки.
2. Головные поплавки
[125] На фиг. 6 головной поплавок 350 поддерживает буксируемую косу 60, буксируемую судном 30 на буксировочном тросе-кабеле от скега 100. Другие буксируемые косы 60 в расстановке могут быть аналогичным образом размещены в плоскости вблизи показанной буксируемой косы 60 при использовании тросов разводки и отклонителей кос (непоказанных).
[126] Головной поплавок 350 может быть аналогичен дополнительным поплавкам или буям 250 из системы плавучести источника, так что головной поплавок 350 для буксируемой косы 60 также может иметь регулируемую плавучесть. Головной поплавок 350 привязан к буксировочному тросу-кабелю 65 от скега 100. Как показано на фиг. 9А, предпочтительно, чтобы головной поплавок 350 был расположен непосредственно над буксировочным тросом-кабелем 65 и для него могли использоваться кронштейны 352, 354 и тросы 356. В другой компоновке, изображенной на фиг. 9С, головной поплавок 350 может быть расположен непосредственно на буксировочном тросе-кабеле 65.
[127] Как показано на фиг. 9А, головной поплавок 350 имеет основную часть 370 со сборкой 352 кронштейнов, расположенной на нем, которая соединена тросами 356 с кронштейнами на буксировочном тросе-кабеле 65. Торцевые крышки 360А-В установлены на основной части 370, а задняя торцевая крышка 360В может иметь стабилизирующие ребра 362 или что-либо подобное.
[128] Головной поплавок 350 с регулируемой плавучестью имеет плавучесть, сконфигурированную до выпуска для конкретной реализации. Например, плавучесть головного поплавка 350 конфигурируют применительно к буксируемой косе 60, глубине, на которой буксируемая коса 60 должна буксироваться, скорости буксировки и т.д. Если необходимо, головной поплавок 350 на буксируемой косе 60 также может включать в себя управляемый по глубине погружения поплавок, аналогичный поплавку 220 на источнике 200. В этом случае может быть необходимым источник текучей среды и передача ее от судна к поплавку 350 способом, аналогичным рассмотренному выше.
[129] На фиг. 9В показан вид сбоку в разрезе головного поплавка 350 согласно настоящему раскрытию. В общем случае поплавок 350 аналогичен поплавкам 250 с регулируемой плавучестью источника 200, рассмотренным выше.
[130] Например, как показано на фиг. 9В, поплавок 350 включает в себя основную часть 370 и торцевые крышки 360А-В. Основная часть 370 имеет внешнюю оболочку 303, окружающую плавучий материал 374. Основная часть 370 имеет полый сердечник 376, в котором удерживаются множество элементов 380 плавучести и/или прокладок 390. Каждый из элементов 380 плавучести имеет пенопластовый вкладыш, который может быть окружен подкрепляющим ободом. Прокладки 390 не имеют пенопласта и вместо этого представляют собой просто нейтральные кольца, которые могут быть изготовлены, например, из отрезков трубы из полиэтилена высокой плотности.
[131] Силу плавучести, создаваемую поплавком 350, расположенным в воде, можно регулировать или подстраивать, используя элементы 380 плавучести и прокладки 390. Например, одну из торцевых крышек 360А-В (или обе) можно снимать с основной части 370 и полый сердечник 376 основной части 370 можно заполнять в требуемом соотношении элементами 380 плавучести и прокладками 390. Плавучесть каждого из регулируемых поплавков 350 конфигурируют под конкретную буксируемую косу (60), для поддержания которой размещают поплавок 350, или с учетом других факторов, отмеченных в этой заявке.
3. Отклонители кос
[132] На фиг. 10 показан пример отклонителя 400 кос, который можно использовать совместно с раскрытой системой для поддержания буксируемых кос или сейсмического источника. Этот отклонитель 400 кос имеет раму 404, удерживающую одну или несколько заслонок или лопастей 402, предназначенных для соприкосновения с водой при буксировке. Можно использовать другие конфигурации отклонителя 400 кос.
[133] Поскольку отклонитель 400 кос поддерживает буксируемые косы (60), буксируемые ниже поверхности воды, предпочтительно, чтобы отклонитель кос 400 имел нейтральную плавучесть. В соответствии с этим отклонитель 400 кос может иметь элемент плавучести или поплавок 406, расположенный на нем и соединенный с ним, который предназначен для придания отклонителю 400 кос нейтральной плавучести на заданной глубине погружения. В дополнение к этому отклонитель 400 кос может иметь управляемые крылья (непоказанные), раскрытые в другом месте этой заявки, для управления глубиной погружения отклонителя 400 кос при буксировке.
[134] В одном примере элемент 406 плавучести можно заполнять пенопластом или чем-либо подобным, чтобы плавучесть элемента можно было задавать для конкретной глубины погружения до выпуска. Фактически, для регулируемой плавучести элемента 406 можно использовать компоненты, аналогичные поплавку с регулируемой плавучестью, раскрытому выше с обращением к фиг. 8A-8D и 9А-9В.
[135] В ином случае в дополнение к любому пенопласту элемент 406 плавучести может содержать заполняемый объем (например, мягкий резервуар или камеру), раскрытый в этой заявке, для конфигурирования его плавучести и управления по глубине погружения. Например, на фиг. 10В схематически показаны детали отклонителя кос 400, имеющего динамический элемент 406 плавучести.
[136] В соответствии с ожидаемым отклонитель 400 кос при буксировке в воде действует как крыло или заслонка. Под действием силы тяжести отклонитель 400 кос продвигается на более значительные глубины, движение в воде влияет на всплытие отклонителя 400 кос на поверхность, а буксирные тросы тянут отклонитель 400 кос в воде. Наконец, элемент 406 плавучести оказывает влияние на поддержание отклонителя 400 кос на заданной глубине в воде. Наряду с этим схема геометрии отклонителя кос и прикладываемые силы должны быть такими, при которых отклонитель 400 кос будет оставаться устойчивым в воде при буксировке и не будет поворачиваться и переваливаться вследствие действия крутящего момента.
[137] Для поддержания глубины погружения и устойчивости элемент 406 плавучести может включать в себя датчик 401 глубины, контроллер 405 и камеру 407 плавучести. В ответ на изменения глубины сверх заданного уровня, обнаруживаемые датчиком 401 глубины, контроллер 405 может регулировать плавучесть камеры 407, чтобы изменять глубину погружения отклонителя кос. Например, контроллер 405 может приводить в действие клапан или насос, и камера 407, заполненная воздухом, может наполняться водой или вода может удаляться из нее. Фактически, в элементе 406 плавучести для отклонителя 400 кос можно использовать компоненты управления глубиной погружения, аналогичные компонентам управляемого по глубине погружения поплавка, рассмотренного выше с обращением к фиг. 6-7 и во включенных путем ссылки патентных заявках.
[138] В качестве дополнительной справочной информации на фиг. 10C показан перспективный вид только участка расстановки буксируемых кос. Отклонитель 400 кос согласно настоящему раскрытию показан соединенным с тросами 62, 63, 66 и 68 относительно буксировочного троса-кабеля 65, головного поплавка 350 и буксируемой косы 60. И в этом случае отклонитель 400 кос имеет раму 404, удерживающую одну или несколько заслонок или лопастей 402, предназначенных для соприкосновения с водой при буксировке в ней. Кроме того, отклонитель 400 кос может иметь элемент плавучести или поплавок 406, расположенный на нем и соединенный с ним, который предназначен для придания отклонителю 400 кос нейтральной плавучести на заданной глубине. Буксирный трос 62 от скега (непоказанного) соединен с направляющими стропами 63, соединенными с отклонителем 400 кос. Отводной трос 66 от него соединен с буксировочным тросом-кабелем 65 и тросом 68 разводки для показанной буксируемой косы 60. Эта компоновка предполагается приведенной для примера, поскольку в зависимости от реализации могут использоваться другие компоновки.
4. Устройства управления
[139] Как отмечалось выше, в системе 10 можно использовать устройства 80 управления на буксируемой косе 60, чтобы управлять положением и глубиной погружения. Для справки на фиг. 11А показан перспективный вид управляемого стабилизатора 87а, который можно использовать для направления буксируемой косы 60 (то есть, регулирования поперечного положения буксируемой косы 60). Кроме того, на фиг. 11В показан вид сбоку управляемого крыла 87b, которое можно использовать для регулирования глубины погружения (то есть, положения по вертикали) буксируемой косы 60. Подробности относительно таких устройств, имеющих стабилизаторы или крылья, размещаемых на кабеле для регулирования поперечного положения или положения по вертикали кабеля буксируемой косы, можно найти в патентах США №№6525992, 7092315, 7206254 и 7423929, каждый из которых включен в эту заявку путем ссылки. Другое подходящее устройство, которое можно использовать при выпуске буксируемого оборудования и получать требуемое разнесение, раскрыто в WO2013/059926.
[140] Этими управляемыми стабилизаторами или крыльями 87a-b в системе 10 могут быть системы DIGIFIN™ направления буксируемых кос, имеющиеся в распоряжении ION Geophysical и обеспечивающие направление буксируемых кос. Кроме того, ими могут быть системы DIGIBIRD™ направления буксируемых кос, имеющиеся в распоряжении ION Geophysical и обеспечивающие управление глубиной погружения буксируемых кос. (DOGIBIRD является зарегистрированным товарным знаком ION Geophysical Corporation.)
[141] Управление стабилизаторами или крыльями 87a-b и определение положений датчиков 70 можно выполнять, используя систему управления (40 на фиг. 6-7) на судне 30 и имеющееся программное средство. Кроме того, можно использовать другие устройства, в том числе системы с прикрепленным к буксируемой косе магнитным компасом, имеющиеся в распоряжении ION Geophysical и обеспечивающие информацию о направлении по компасу, а также измерение глубины и управление. Кроме того, с помощью системы (40) управления и имеющегося программного средства можно управлять различными стабилизаторами и крыльями 87a-b, чтобы уклоняться от айсбергов или крупных глыб льда, которые могут оказываться плавающими на поверхности на протяжении группы (20) буксируемых кос (60) и потенциально имеющими глубину проникновения в воду, достаточную для повреждения погруженных буксируемых кос (60).
Е. Мониторинг положения буксируемых компонентов
[142] В дополнение к управлению плавучестью и положением трехмерной расстановки 20 буксируемых кос 60 с использованием компонентов и способов, раскрытых выше, при работах необходимы адекватные мониторинг и отслеживание положения источника 200 и сейсмических буксируемых кос 60 в расстановке 20, когда сейсмические данные регистрируют, чтобы можно было выполнять построение точных изображений. Поскольку буксируемые компоненты находятся ниже поверхности воды, нельзя использовать некоторые обычные способы мониторинга и отслеживания положений.
[143] Как схематически показано на фиг. 5А, для определения положения сейсмических буксируемых кос 60 системы и датчиков 70 используют полносвязную акустическую сеть. С использованием сети определяют положение вдоль расстановки 20 буксируемых кос в двух измерениях и также определяют положение в трех измерениях между судном 30 и головными поплавками 350 буксируемых кос. При определении положения в двух измерениях используют поперечную связь между буксируемыми косами 60. При определении положения в трех измерениях используют буксируемую приборную гондолу 510, расположенную перед передним концом расстановки 20, находящуюся на другой глубине по сравнению с глубиной погружения буксируемых кос 60.
[144] Как показано более подробно на фиг. 12, один или несколько приемопередатчиков 520 на судне 30 опрашивают приемоответчик (приемоответчики) 522, расположенный на одном или нескольких источниках 200, для определения положения сейсмических источников 200 во время сейсмических работ. Кроме того, один или несколько приемопередатчиков 520 на судне 30 могут опрашивать приемоответчики 522, расположенные на головных поплавках 350 буксируемых кос 60, для определения положений головных частей сейсмических буксируемых кос 60 во время сейсмических работ. В ином случае, если имеются ограничения на распространение сигналов, один или несколько приемопередатчиков 530 на источниках 200 с той же целью могут опрашивать приемоответчики 522, расположенные на головных поплавках (поплавке) 350.
[145] Для получения информации о положении в дополнительной плоскости буксируемую приборную гондолу 510 буксируют позади судна 30 (например, от скега 100), используя кабель или буксирный трос 512, на меньшей глубине, чем глубина погружения буксируемых кос 60 расстановки 20. Один или несколько приемопередатчиков 520 на судне 30 опрашивают приемоответчик 522, расположенный на буксируемой приборной гондоле 510, а один или несколько приемопередатчиков 540 на буксируемой приборной гондоле 510 опрашивают приемоответчик 522, расположенный на источнике 200, и приемоответчики 522 на головных поплавках 350 буксируемых кос 60.
[146] При обычной трехмерной сейсмической разведке источник 200 и буксируемые косы 60 буксируют вблизи поверхности воды, которая образует состоятельную плоскость, и можно получать GPS-отсчеты положений компонентов, чтобы выполнять мониторинг и отслеживание этой информации во время разведки. Однако в представленной системе 10 буксируемая расстановка 20 буксируемых кос 60 и источники 200 находятся ниже поверхности воды, так что в системе 10 отсутствует такая состоятельная и точная информация о положении. Вместо этого с буксируемой приборной гондолы 510 опрашивается планарная расстановка 20, находящаяся выше, и непланарная сеть образована без использования на поверхности глобальной системы определения местоположения. Таким образом, информация о положении, получаемая с помощью буксируемой приборной гондолы 510, способствует дальнейшему уточнению другой информации о положении, получаемой в системе 10, так что обработка сейсмических данных и построение изображений могут быть улучшены.
[147] Приемопередатчики 520, 530, 540 различных видов можно использовать для по меньшей мере определения расстояния до приемоответчиков 522. Предпочтительно, чтобы приемопередатчики 520, 530, 540 могли определять расстояние, а также направление (пеленг). Например, приемопередатчики 520, 530, 540 могут быть акустическими приемопередатчиками, такими как приемопередатчики системы с ультракороткой базовой линией для получения информации о расстоянии и направлении. В приемопередатчиках 520, 530, 540 могут использоваться другие акустические сигналы для определения местоположения, такие как сигналы системы с короткой базовой линией и сигналы системы с длинной базовой линией.
[148] Для повышения эффективности передней акустической сети буксируемая приборная гондола 510 с ее глубоководной буксируемой акустической платформой верхнего обзора обеспечивает определение расстояний в трех измерениях. Это делает возможным измерение в системе 10 глубины погружения различных буксируемых компонентов. Движение буксируемой приборной гондолы 510 компенсируется, чтобы можно было использовать акустическую систему определения расстояния или местоположения на основе ультракороткой базы. Кроме того, системы инерциальной навигации на буксируемой приборной гондоле 510 можно использовать для мониторинга и отслеживания ее положения.
[149] При дополнительном определении положений буксируемых кос 60 и других компонентов в расстановке 20 можно использовать способы поперечной связи, счисления пути и другие способы. Например, на фиг. 13 показана только часть системы 10, имеющей одну буксируемую косу 60 с датчиками 70, расположенными на ней для определения формы буксируемой косы 60. В системе 10 используются GPS-отсчет (x) для судна 30, известные положения (Y1-Y5) датчиков, известное положение (Y6) хвостовой части буксируемой косы 60 и различные направления по компасам. Как показано, данные о датчиках 70 и положении хвостовой части буксируемой косы 60 (включая каждое из положений (Y) датчиков на буксируемой косе 60, направления по компасам с поправкой на магнитное склонение и т.п.) могут использоваться для оценивания положения точек на буксируемой косе 60 и получения формы буксируемой косы. Все эти данные в сочетании с GPS-отсчетом (X) на судне, получаемым при использовании бортового GPS-приемника 550, могут быть объединены с данными о положении с системы инерциальной навигации для коррекции погрешности вследствие ухода параметров. При наличии возможности в хвостовом устройстве 555 можно по меньшей мере время от времени получать GPS-отсчеты.
[150] Например, как показано на фиг. 14, в системах 10 можно использовать различные компоновки акустических систем для осуществления акустической поперечной связи, чтобы определять положения буксируемых кос в расстановке 20. Каждая буксируемая коса 60, буксируемая с судна 30, может иметь акустические датчики 560, распределенные по ней, чтобы акустические сигналы, обнаруживаемые между буксируемыми косами 60, можно было использовать в способах поперечной связи для триангуляционного определения положений буксируемых кос 60.
[151] Приведенное выше описание предпочтительных и других вариантов осуществления не предназначено для ограничения или сужения объема или применимости концепций изобретения, предложенных заявителем. Идеи настоящего раскрытия можно применять при двумерной, трехмерной или четырехмерной сейсморазведке в покрытых льдом или имеющих препятствия водах, а также в обычных условиях морской сейсморазведки. Фактически, идеи настоящего раскрытия можно использовать в любой окружающей среде, а не только в средах, предрасположенных к наличию физических преград или препятствий. Например, независимо от погодных условий, сильной зыби, шума, любых обычных опасностей и даже при нормальных условиях, встречающихся при морской сейсморазведке, можно получать выгоду от системы настоящего раскрытия.
[152] Кроме того, аспекты и способы, рассмотренные применительно к одному конкретному варианту осуществления, реализации или компоновке, раскрытым в этой заявке, можно совместно использовать или сочетать с аспектами и способами, рассмотренными в других конкретных вариантах осуществления, реализациях и компоновках, раскрытых в этой заявке. В обмен на раскрытие концепций изобретения, содержащихся в этой заявке, заявитель испрашивает все патентные права, предоставляемые прилагаемой формулой изобретения. Поэтому предполагается, что прилагаемая формула изобретения включает в себя все модификации и изменения к полному объему, когда они подпадают под объем нижеследующей формулы изобретения или ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| ОПЕРАЦИИ АРКТИЧЕСКОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2624835C2 |
| ДИНАМИЧЕСКИ УПРАВЛЯЕМЫЕ КРЫЛЬЕВЫЕ СИСТЕМЫ И СПОСОБЫ | 2016 |
|
RU2729696C2 |
| КОНФИГУРАЦИЯ БУКСИРОВКИ СЕЙСМИЧЕСКИХ ИСТОЧНИКОВ С ШИРОКИМ РАЗНОСОМ | 2018 |
|
RU2747833C1 |
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
| УСТРОЙСТВО ДЛЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2016 |
|
RU2621272C1 |
| СПОСОБ КОМПОНОВКИ И РАЗВЕРТЫВАНИЯ МОРСКОГО ВИБРАТОРА | 2016 |
|
RU2718146C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ПЕРЕМЕННОЙ ПЛАВУЧЕСТИ И ПОДЪЕМА К ПОВЕРХНОСТИ ДЛЯ ОБЕСПЕЧЕНИЯ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2017 |
|
RU2744984C2 |
| СИСТЕМА УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ БУКСИРУЕМЫМ МОРСКИМ ОБЪЕКТОМ | 2020 |
|
RU2806020C2 |
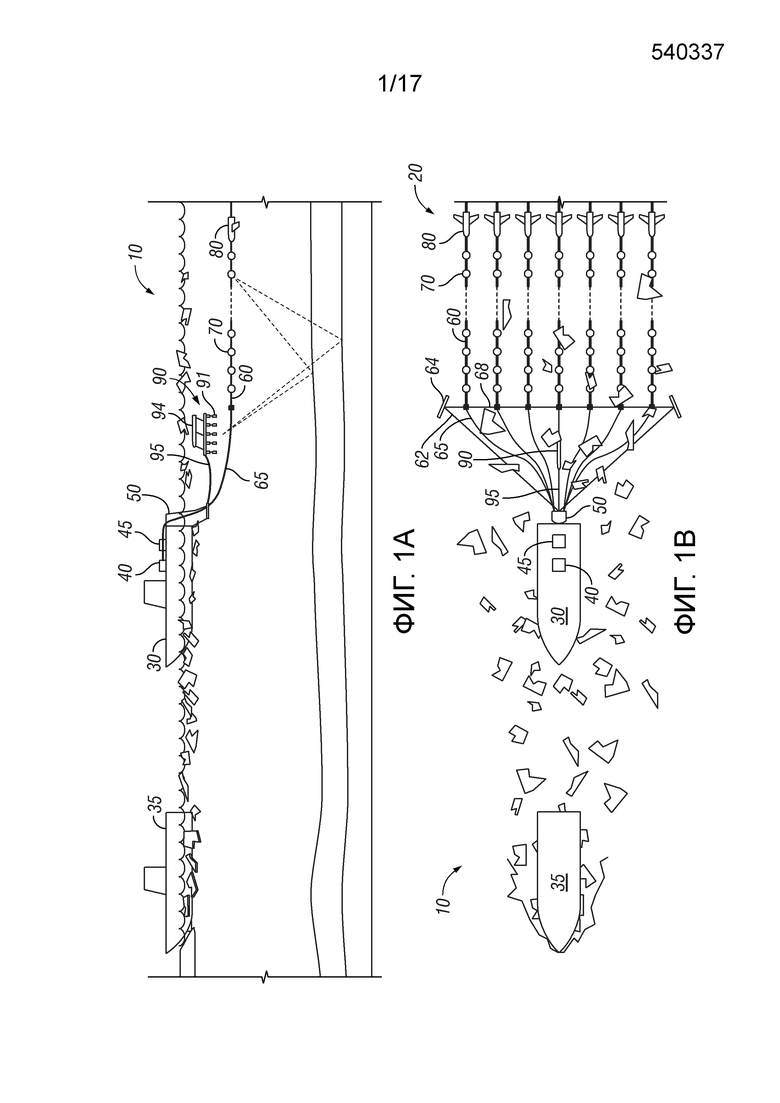
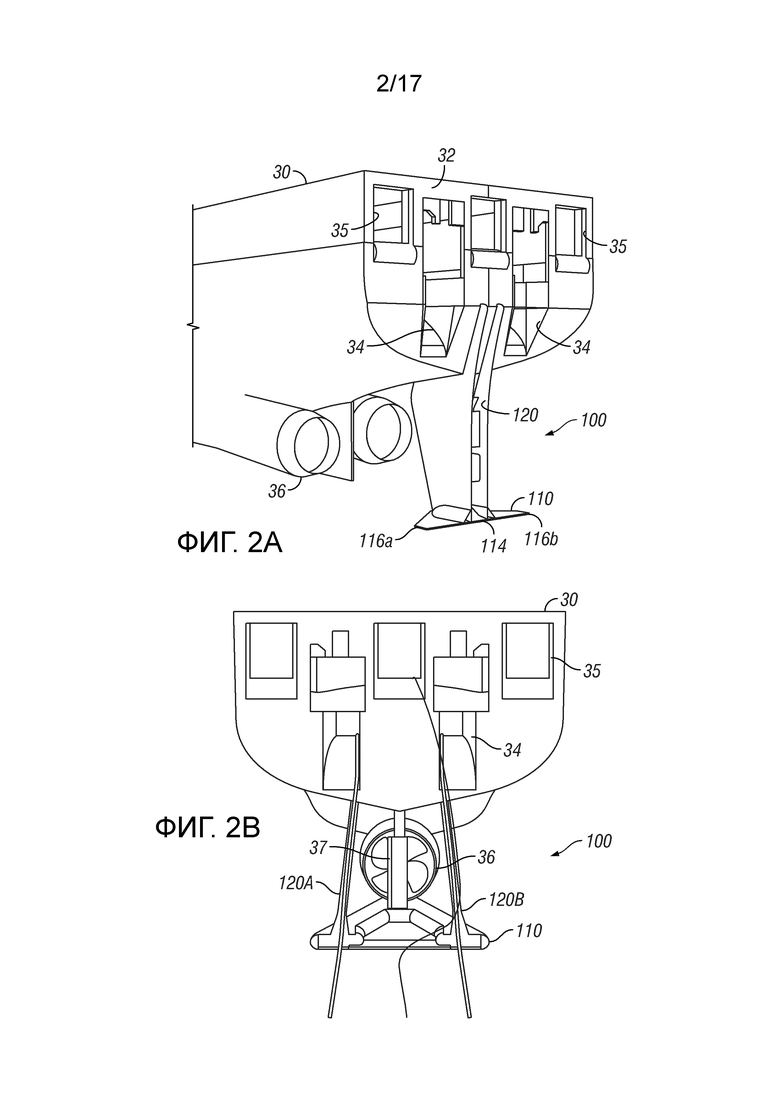
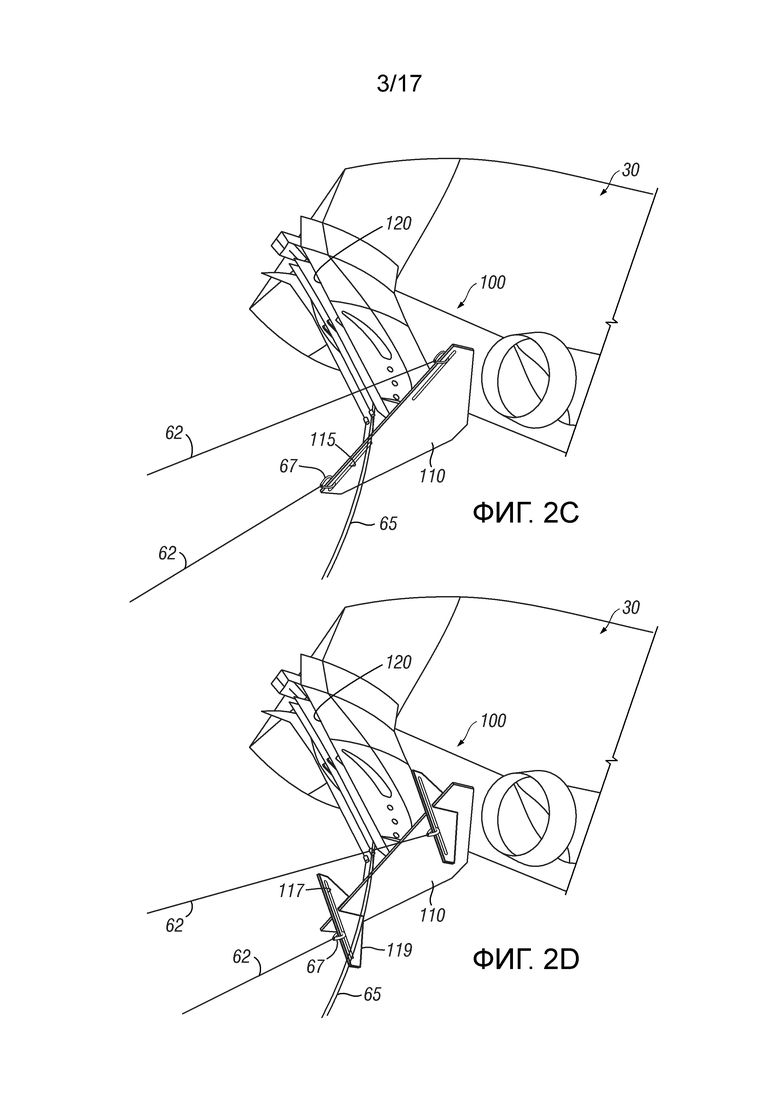
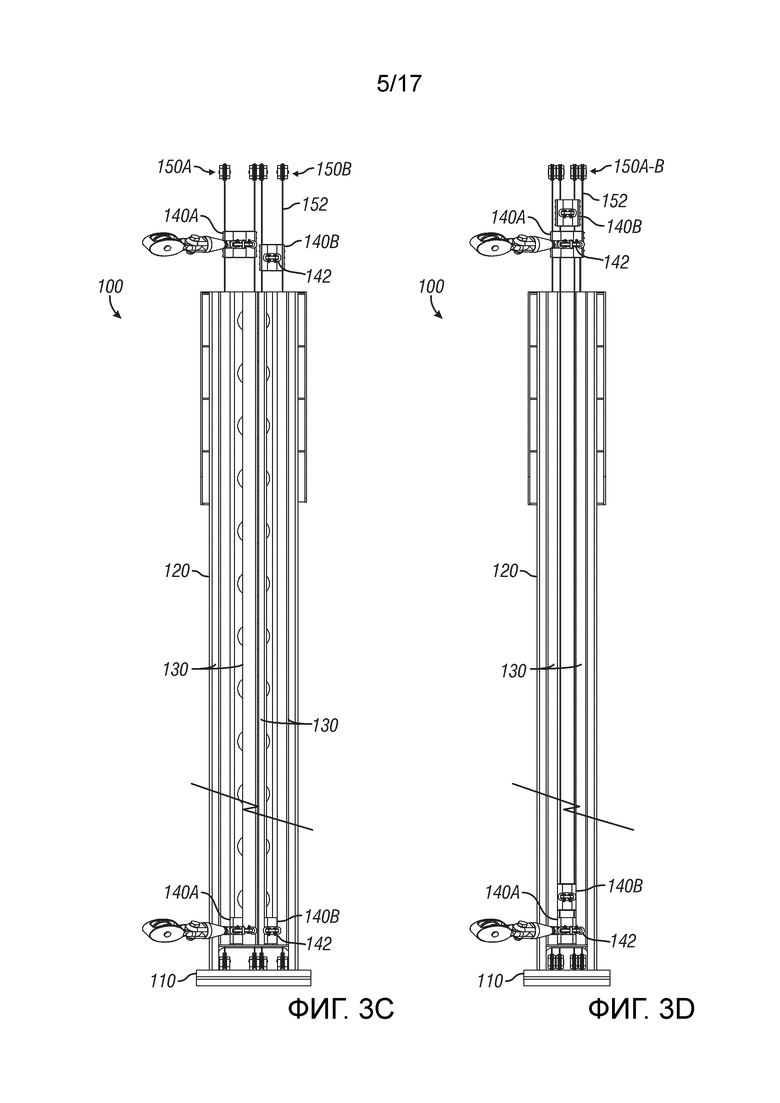
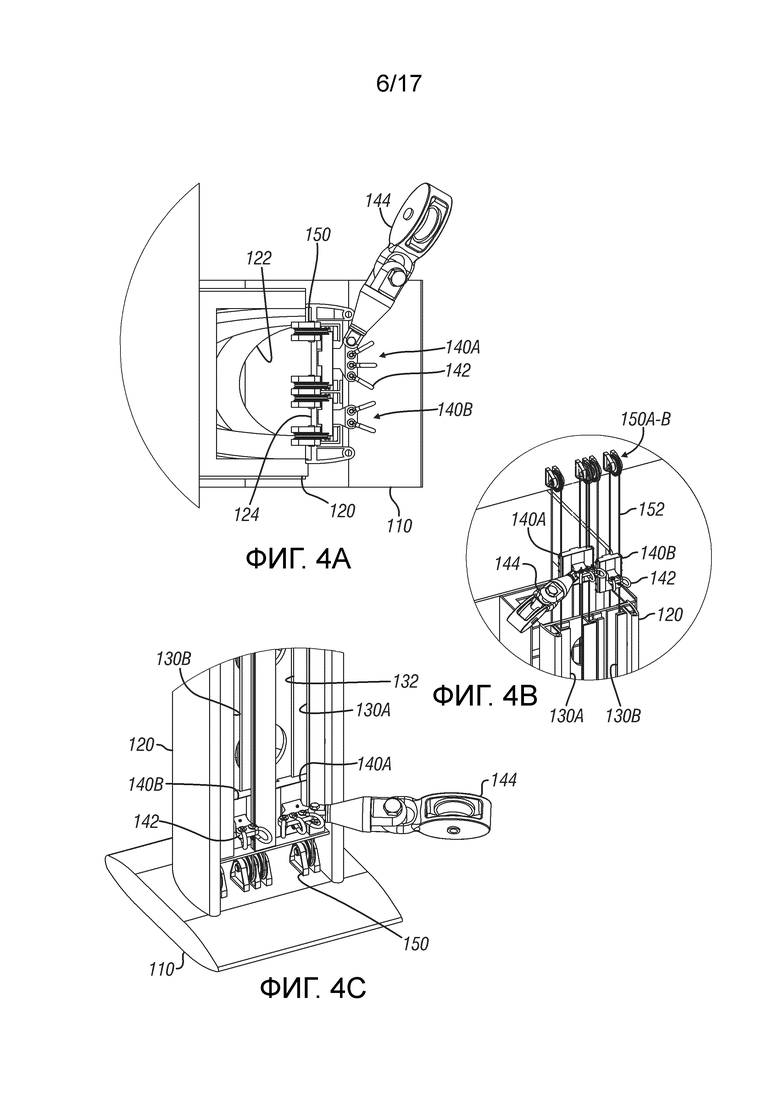
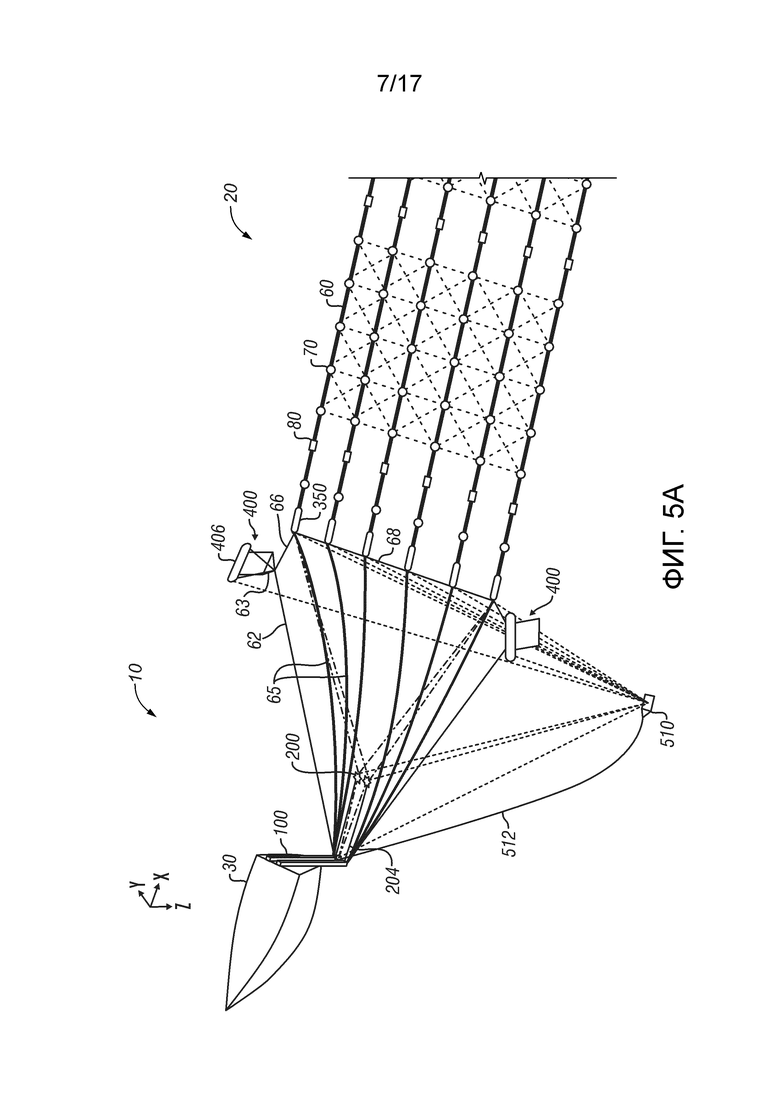
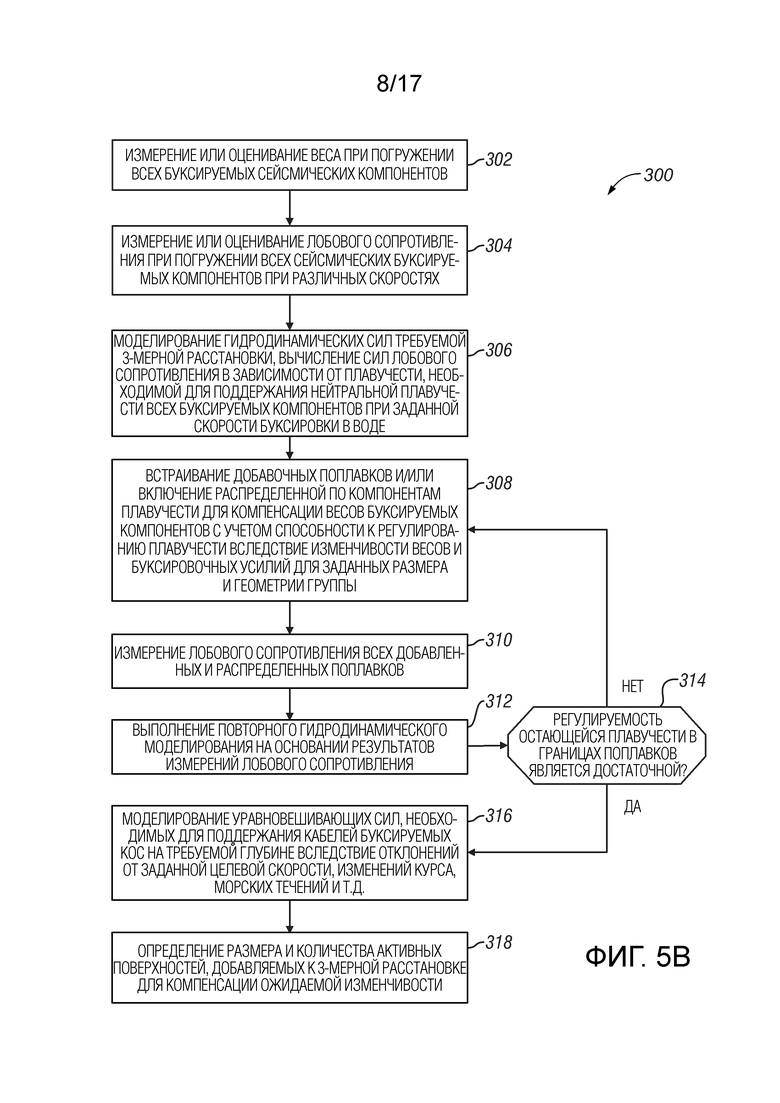
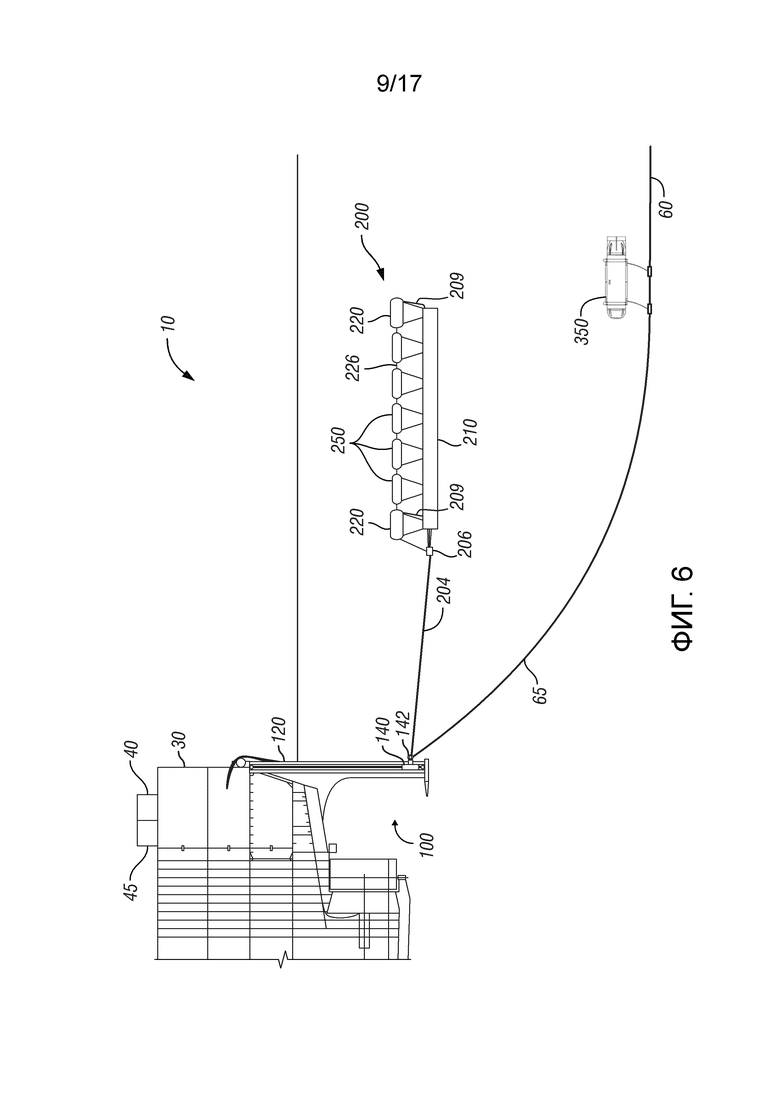
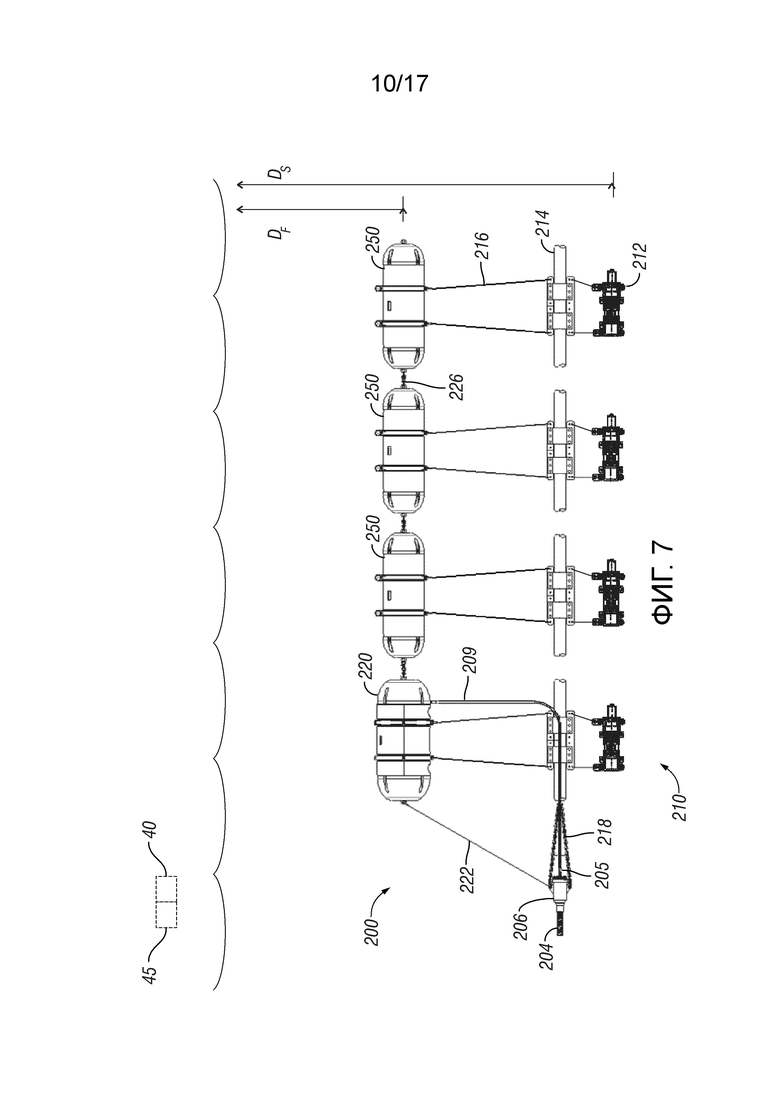
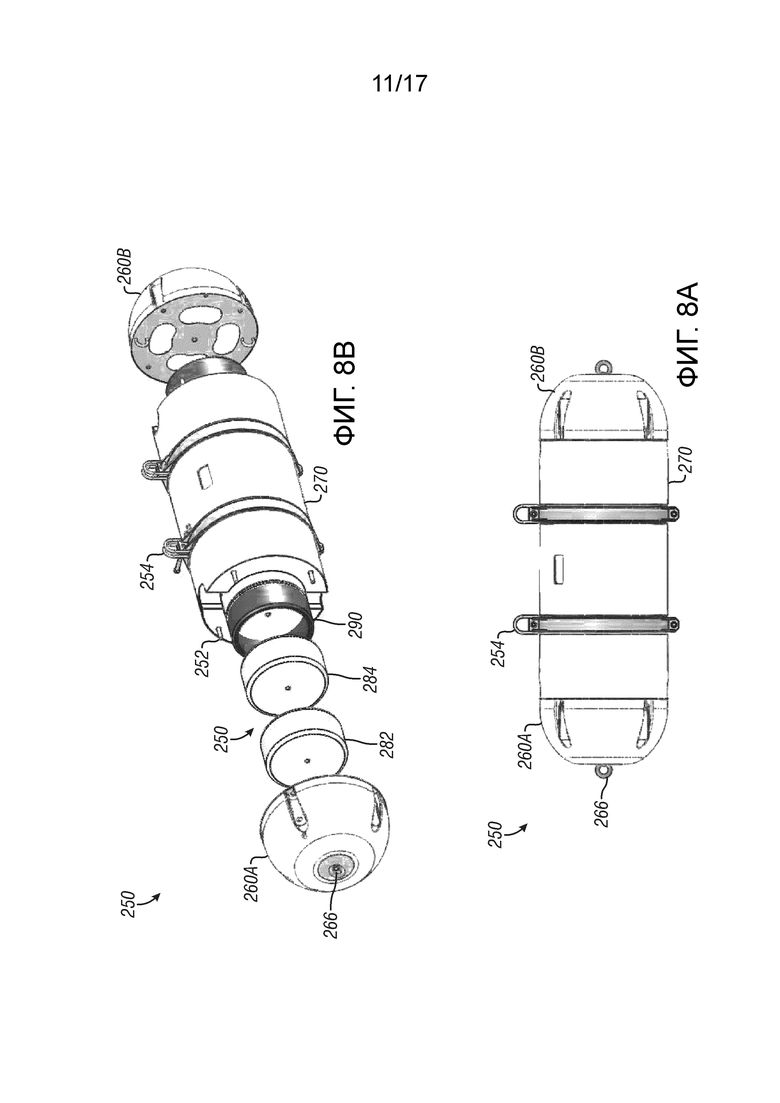
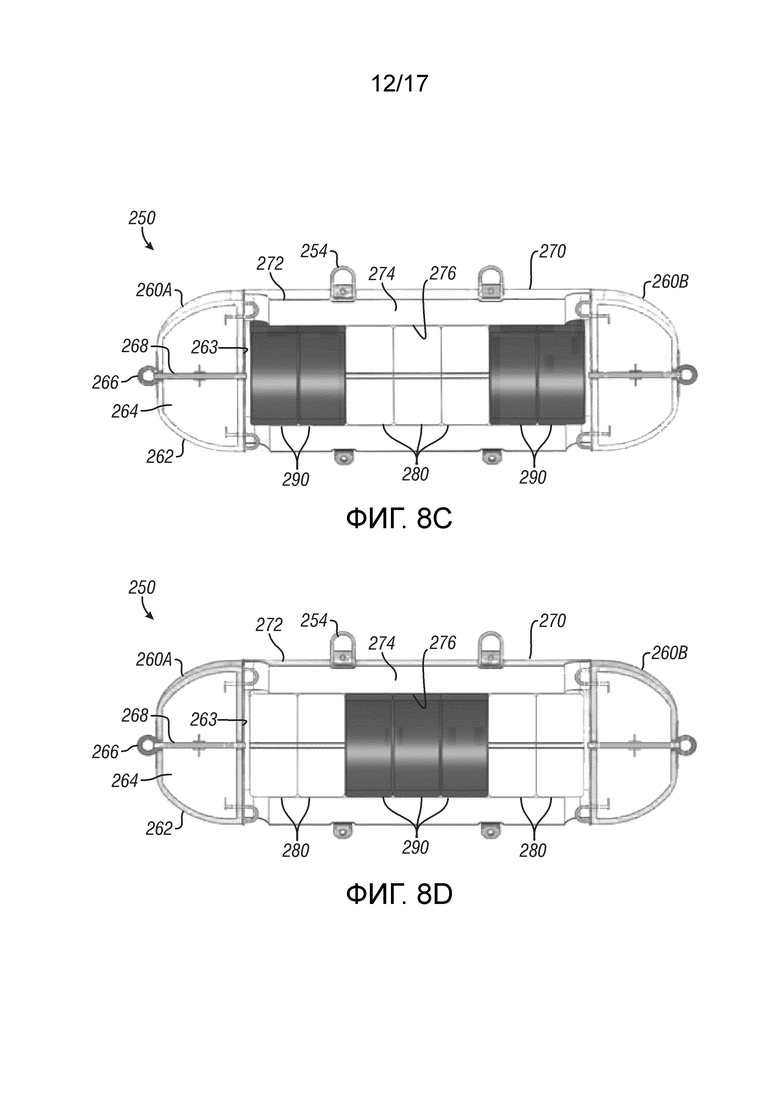
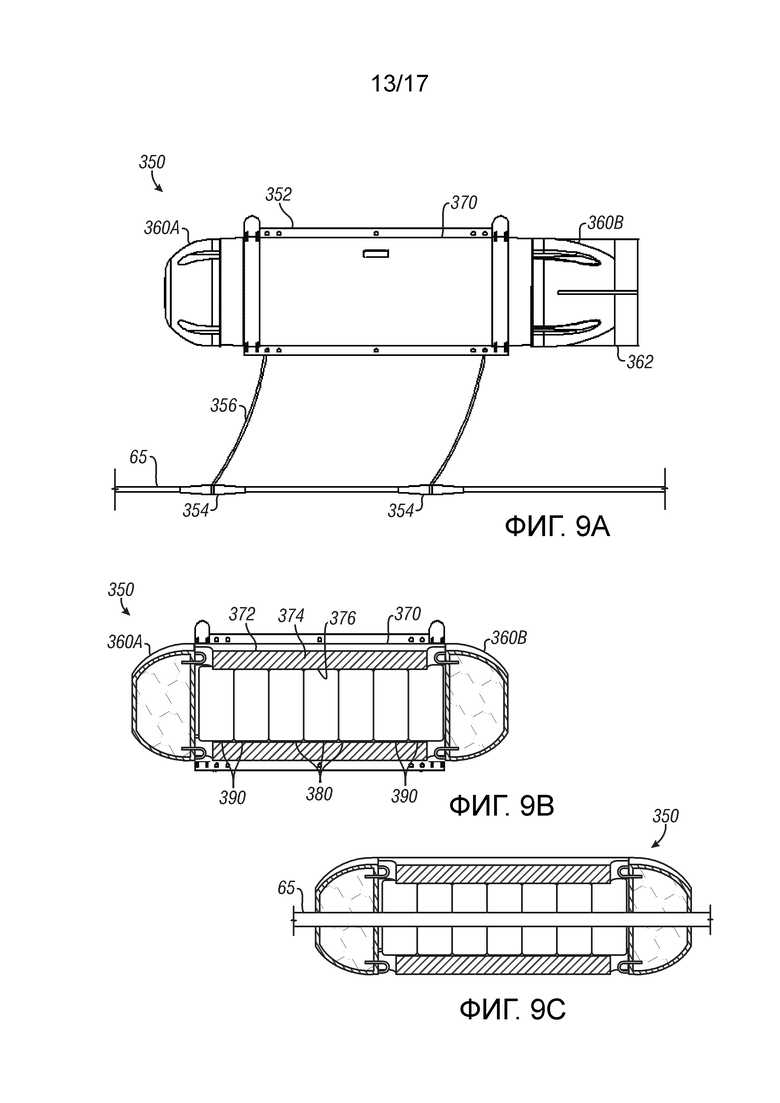
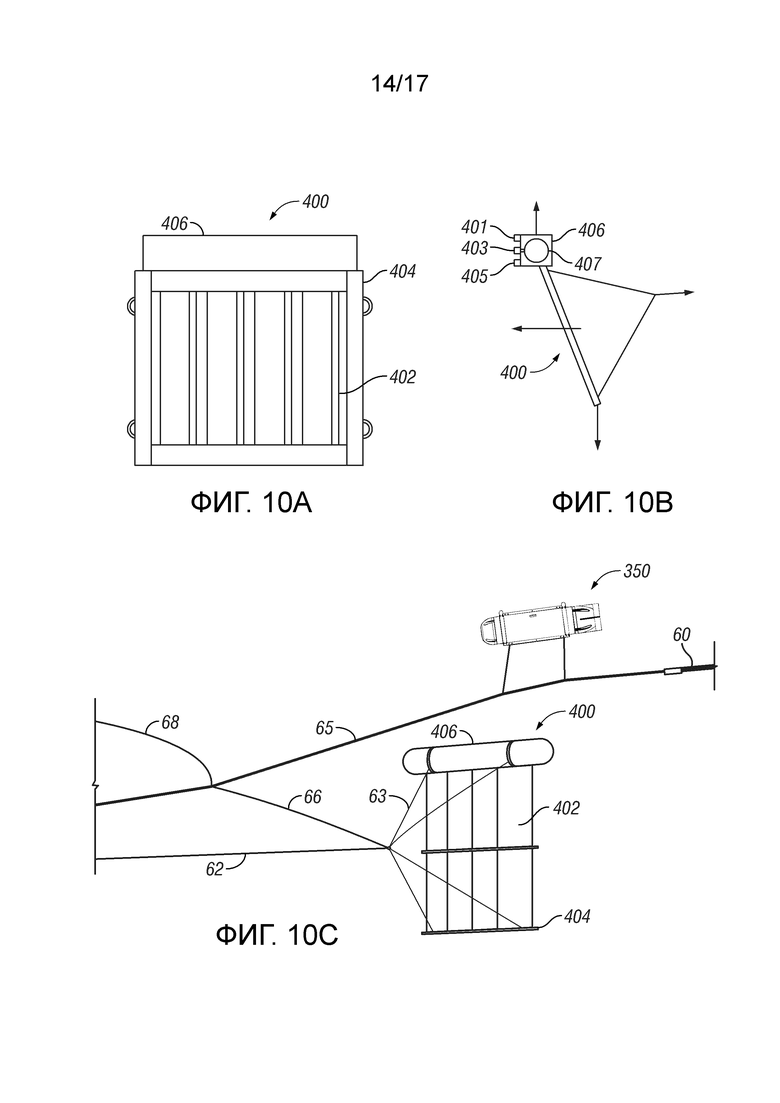

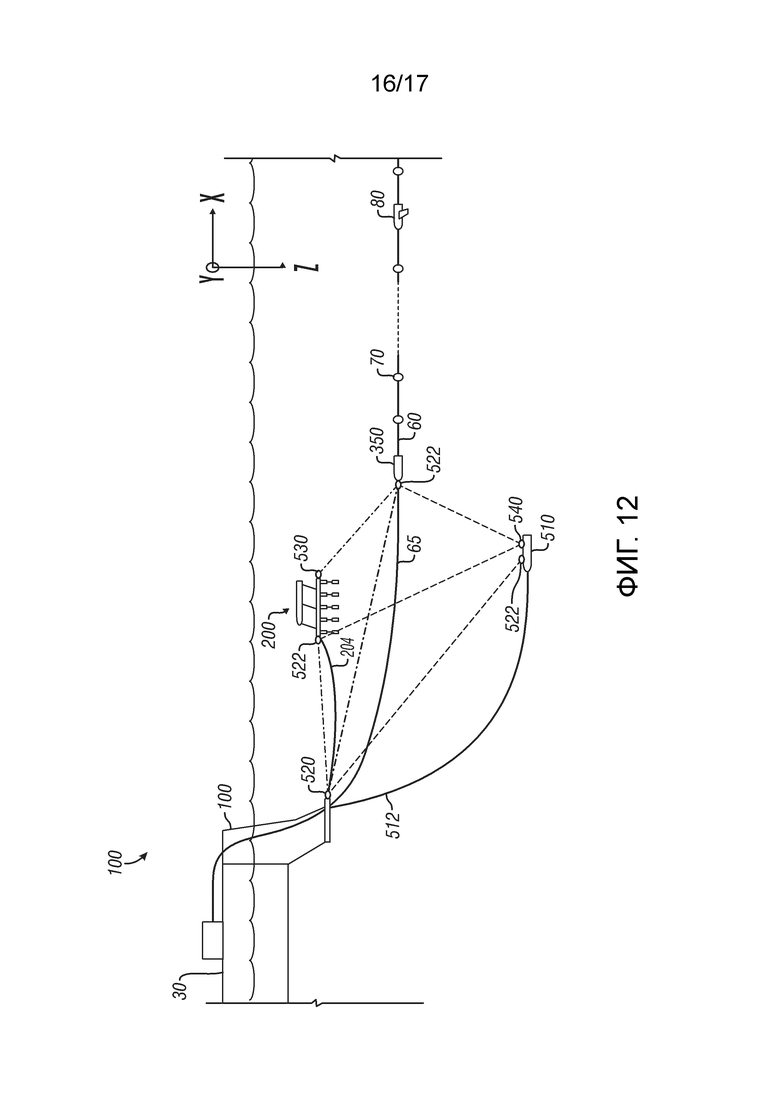
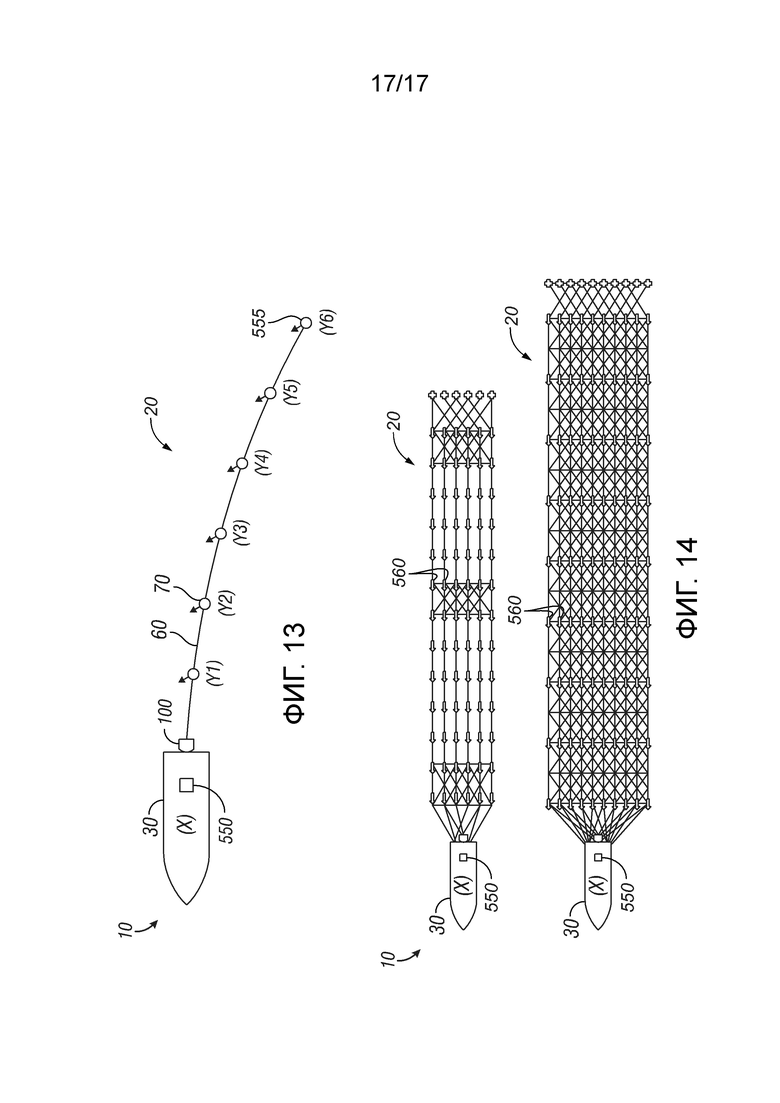
Изобретение относится к области геофизики и может быть использовано для проведения морских сейсморазведочных работ в зонах, покрытых ледовым покровом. Согласно заявленному решению предложена морская сейсморазведочная аппаратура для судна, при этом аппаратура содержит множество буксируемых компонентов, получающих сейсмические данные, при этом буксируемые компоненты буксируются судном в горизонтальной расстановке и погружены на первые уровни ниже поверхности воды, по меньшей мере один первый приемопередатчик, расположенный на судне, при этом по меньшей мере один первый приемопередатчик излучает первый сигнал и обнаруживает первую информацию о положении буксируемых компонентов в горизонтальной расстановке по первому сигналу, и по меньшей мере один второй приемопередатчик, буксируемый с судна и погруженный на второй уровень ниже поверхности воды, при этом по меньшей мере один второй приемопередатчик излучает второй сигнал и обнаруживает вторую информацию о положении буксируемых компонентов по второму сигналу. Сейсморазведочная аппаратура для судна также содержит процессор, обрабатывающий первую и вторую информацию о положении, и формирующий данные о положении буксируемых компонентов в горизонтальной расстановке для привязки к получаемым сейсмическим данным, причем сформированные данные о положении учитывают непланарную сеть буксируемых компонентов, погруженных на первые уровни в горизонтальной расстановке. Технический результат – повышение точности и информативности получаемых данных. 2 н. и 28 з.п. ф-лы, 32 ил.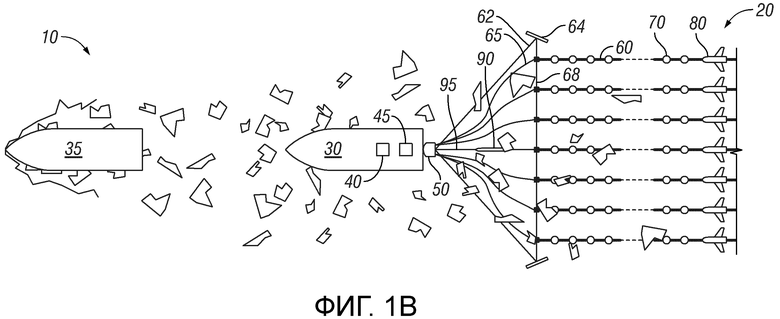
1. Морская сейсморазведочная аппаратура для судна, при этом аппаратура содержит:
множество буксируемых компонентов, получающих сейсмические данные, при этом буксируемые компоненты буксируются судном в горизонтальной расстановке и погружены на первые уровни ниже поверхности воды;
по меньшей мере один первый приемопередатчик, расположенный на судне, при этом по меньшей мере один первый приемопередатчик излучает первый сигнал и обнаруживает первую информацию о положении буксируемых компонентов в горизонтальной расстановке по первому сигналу; и
по меньшей мере один второй приемопередатчик, буксируемый с судна и погруженный на второй уровень ниже поверхности воды, при этом по меньшей мере один второй приемопередатчик излучает второй сигнал и обнаруживает вторую информацию о положении буксируемых компонентов по второму сигналу;
процессор, обрабатывающий первую и вторую информацию о положении и формирующий данные о положении буксируемых компонентов в горизонтальной расстановке для привязки к получаемым сейсмическим данным, причем сформированные данные о положении учитывают непланарную сеть буксируемых компонентов, погруженных на первые уровни в горизонтальной расстановке.
2. Аппаратура по п. 1, содержащая выпускаемое устройство, буксируемое с судна и имеющее по меньшей мере один второй приемопередатчик.
3. Аппаратура по п. 1, в которой первая информация о положении содержит расстояния по меньшей мере некоторых буксируемых компонентов от по меньшей мере одного первого приемопередатчика.
4. Аппаратура по п. 1, в которой первая информация о положении также содержит пеленги по меньшей мере некоторых буксируемых компонентов относительно по меньшей мере одного первого приемопередатчика.
5. Аппаратура по п. 1, в которой второй уровень находится ниже первого уровня.
6. Аппаратура по п. 1, в которой буксируемые компоненты содержат буксируемые косы, погруженные на первые уровни, буксируемые в горизонтальной расстановке, и где аппаратура также содержит оборудование поперечной связи, расположенное вдоль буксируемых кос, при этом оборудование поперечной связи излучает третий сигнал и обнаруживает третью информацию о положении буксируемых кос по третьему сигналу.
7. Аппаратура по п. 1, в которой каждый из по меньшей мере одного первого и одного второго приемопередатчиков содержит акустический приемопередатчик.
8. Аппаратура по п. 7, в которой каждый из первого и второго сигналов содержит по меньшей мере один из акустического сигнала для определения местоположения, сигнала системы с ультракороткой базовой линией, сигнала системы с короткой базовой линией и сигнала системы с длинной базовой линией.
9. Аппаратура по п. 1, содержащая по меньшей мере один приемоответчик, связанный с по меньшей мере одним вторым приемопередатчиком и отвечающий на первый сигнал.
10. Аппаратура по п. 1, в которой буксируемые компоненты выбираются из группы, состоящей из сейсмического источника, группы воздушных пушек, электромагнитного источника, магнитного источника, гидролокационного устройства, устройства генерации звука, отклонителя кос, акустического устройства, устройства построения изображения и буксируемой косы.
11. Аппаратура по п. 1, в которой буксируемые компоненты содержат сейсмический источник, имеющий по меньшей мере один приемоответчик, отвечающий на первый сигнал.
12. Аппаратура по п. 11, в которой по меньшей мере один первый приемопередатчик, расположенный на судне, содержит:
один из по меньшей мере одного первого приемопередатчика, расположенный на судне и образующий пару с по меньшей мере одним приемоответчиком сейсмического источника; и
другой из по меньшей мере одного первого приемопередатчика, расположенный на источнике и излучающий первый сигнал для дополнительных приемоответчиков буксируемых компонентов.
13. Аппаратура по п. 1, в которой по меньшей мере один из буксируемых компонентов содержит поплавок, погруженный ниже поверхности воды и поддерживающий по меньшей мере один буксируемый компонент, при этом поплавок имеет сконфигурированную плавучесть.
14. Аппаратура по п. 13, в которой поплавок содержит:
основную часть, ограничивающую полость; и
один или несколько плавучих вкладышей, расположенных в полости и конфигурирующих плавучесть поплавка.
15. Аппаратура по п. 14, также содержащая одну или несколько прокладок, которые имеют нейтральную плавучесть и расположены в полости.
16. Аппаратура по п. 14, в которой основная часть содержит:
корпус, имеющий полость, ограниченную в нем; и
по меньшей мере одну торцевую крышку, прикрепленную к одному концу корпуса и закрывающую полость.
17. Аппаратура по п. 13, в которой по меньшей мере один буксируемый компонент содержит буксируемую косу, буксируемую судном и поддерживаемую поплавком, при этом буксируемая коса имеет один или несколько датчиков для восприятия сейсмического сигнала.
18. Аппаратура по п. 13, в которой по меньшей мере один буксируемый компонент содержит отклонитель кос, буксируемый судном и поддерживаемый поплавком, при этом отклонитель кос соединен с одним или несколькими дополнительными буксируемыми компонентами.
19. Способ морской сейсморазведки с судна, при этом способ содержит этапы, на которых:
буксируют с судна множество буксируемых компонентов в горизонтальной расстановке, погруженных на первый уровень ниже поверхности воды;
получают сейсмические данные с буксируемых компонентов;
обнаруживают первую информацию о положении буксируемых компонентов в горизонтальной расстановке по первому сигналу, излучаемому по меньшей мере одним первым приемопередатчиком, расположенным на судне;
обнаруживают вторую информацию о положении буксируемых компонентов в горизонтальной расстановке по второму сигналу, излучаемому по меньшей мере одним вторым приемопередатчиком, буксируемым позади судна и погруженным на второй уровень ниже поверхности воды; и
уточняют положения буксируемых компонентов в непланарной сети, погруженных на первые уровни горизонтальной расстановке путем обработки первой и второй информации о положении.
20. Способ по п. 19, в котором обнаружение первой информации о положении содержит обнаружение по меньшей мере расстояний по меньшей мере некоторых буксируемых компонентов от по меньшей мере одного первого приемопередатчика.
21. Способ по п. 20, в котором обнаружение первой информации о положении также содержит обнаружение пеленгов по меньшей мере некоторых буксируемых компонентов относительно по меньшей мере одного первого приемопередатчика.
22. Способ по п. 21, в котором обнаружение второй информации о положении содержит обнаружение расстояний и пеленгов по меньшей мере некоторых буксируемых компонентов относительно по меньшей мере одного второго приемопередатчика.
23. Способ по п. 19, в котором обнаружение первой информации о положении содержит обнаружение по меньшей мере одного приемоответчика, связанного с по меньшей мере одним вторым приемопередатчиком и отвечающего на первый сигнал.
24. Способ по п. 19, в котором второй уровень находится ниже первого уровня.
25. Способ по п. 19, в котором буксируемые компоненты содержат буксируемые косы, буксируемые в расстановке, и где способ также содержит:
излучение третьего сигнала оборудованием поперечной связи, расположенным вдоль буксируемых кос; и
обнаружение третьей информации о положении буксируемых кос по третьему сигналу.
26. Способ по п. 19, также содержащий привязку уточненных положений к получаемым сейсмическим данным.
27. Способ по п. 19, в котором обнаружение первой информации о положении содержит обнаружение сейсмического источника как одного из буксируемых компонентов, имеющего приемоответчик, отвечающий на первый сигнал.
28. Способ по п. 27, в котором обнаружение первой информации о положении содержит:
обнаружение сейсмического источника при использовании одного из по меньшей мере первого приемопередатчика, расположенного на судне и образующего пару с приемоответчиком; и
обнаружение дополнительного одного из буксируемых компонентов при использовании другого по меньшей мере одного первого приемопередатчика, расположенного на сейсмическом источнике и излучающего первый сигнал.
29. Способ по п. 19, в котором буксировка судном буксируемых компонентов, погруженных на первый уровень ниже поверхности воды, содержит поддержание по меньшей мере одного из буксируемых компонентов поплавком, погруженным ниже поверхности воды, при этом поплавок имеет конфигурируемую плавучесть.
30. Способ по п. 29, в котором по меньшей мере один буксируемый компонент выбирают из группы, состоящей из сейсмического источника, группы воздушных пушек, электромагнитного источника, магнитного источника, гидролокационного устройства, устройства генерации звука, отклонителя кос, акустического устройства, устройства построения изображения и буксируемой косы.
| US 20130155807 A1, 20.06.2013 | |||
| US 2012134234 A1, 31.05.2012 | |||
| US 20140153360 A1, 05.06.2014 | |||
| Катодный осциллограф | 1941 |
|
SU65250A1 |
| Устройство для буксировки сейсмографной косы | 1988 |
|
SU1520459A1 |
| Система изменения плавучести подводного зонда | 1983 |
|
SU1125575A1 |

