Изобретение относится к весовым дозирующим устройствам для сыпучих грузов, может быть использовано, например, для автоматической загрузки отходов листовой штамповки в оборудовании для их переработки, и является дополнительным по авт. св. № 1684157.
Известный весовой дозатор сыпучих грузов содержит подающий конвейер, установленный на его выходе поворотный загрузочный лоток с весовым механизмом и приводом, датчик выключения конвейера, размещенный под лотком для взаимодействия с последним и связанный с приводом лотка, а также датчик включения конвейера, взаимодействующий с установленным на лотке упором.
При работе данного дозатора в течение цикля времени, затрачиваемого на поворот лотка в наклонное положение, высыпание груза из лотка и на возврат лотка в исходное положение для загрузки, подающий конвейер простаивает, что, в случае непрерывной подачи груза на конвейер, приводит к неравномерной загрузке конвейера, местному превышению допустимых пределов загрузки и, следовательно, к различным неполадкам в его работе. Кроме того, простои конвейера в момент работы лотка весового дозатора будут приводить к снижению производительности транспортирования и обработки грузов
Цель изобретения - повышение производительности транспортирования и обработки груза за счет сокращения простоев подающего конвейера и в повышении надежности работы за счет более равномерной загрузки конвейера.
Для достижения этой цели з известном весовом дозаторе сыпучих грузов свободный конец конвейера снабжен дополнительным лотком с приводом, весовым механизмом, датчиками включения и выключения приводов лотка и конвейера, выполненным аналогично основному, причем датчик выключения привода конвейера каж- дого из лотков соединен с датчиком включения привода конвейера другого лотка, а привод конвейера выполнен реверсивным.
В предлагаемом весовом дозаторе подающий конвейер имеет реверсивное движение и попеременно загружает то один, то другой лоток, и во время загрузки одного лотка происходит поворот и разгрузка другого лотка. Таким образом сокращены простои конвейера и, за счет увеличения времени его работы и наличия двух загрузочных лотков, повышена производительность транспортирования и подачи сыпучих грузов на последующую обработку.
Кроме того, за счет увеличения времени работы подающего конвейера и сокращения его простоев, подаваемые на конвейер грузы более равномерно распределяются
по его несущей поверхности, что способствует повышению надежности работы.
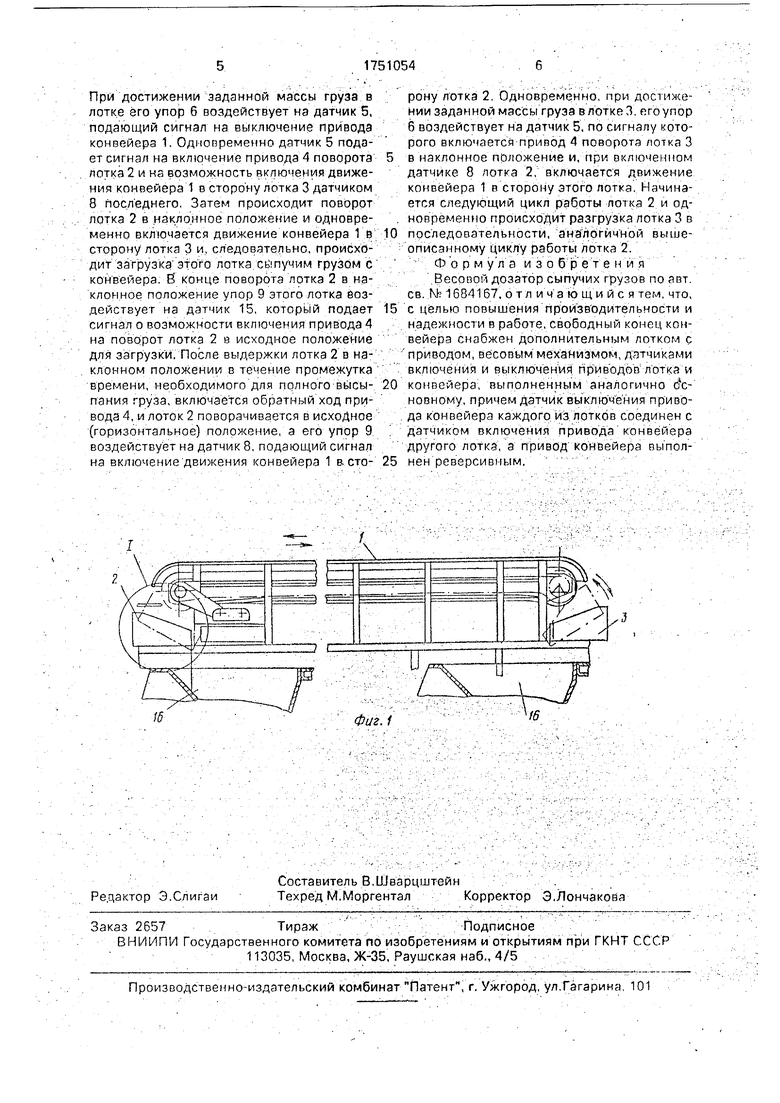
На фиг, 1 показан весовой дозатор, вид сбоку; на фиг. 2 - узел I на фиг 1, вид сбоку на левый поворотный загрузочный лоток с
0 приводом поворота, весовым механизмом и датчиками. Вид на второй лоток является зеркальным отражением фиг. 2 и поэтому на чертежах не показан.
Дозатор содержит реверсивный подаю5 щий конвейер 1, установленные с противоположных концов конвейера симметрично между собой два поворотных загрузочных лотка 2 и 3, каждый из которых снабжен приводом 4, датчиком 5 выключения конвей0 ера 1, связанным с приводом 4 и помещенным под лотком с возможностью взаимодействия с упором 6, выполненным на каждом из лотков 2 и 3. Приводы 4 лотков 2 и 3 выполнены в виде шарнирно установ5 ленных на металлоконструкциях 7 силовых цилиндров, штоки которых шарнирно соединены с лотками 2 и 3 Дозатор снабжен установленными соответственно у лотков 2 и 3 датчиками 8 включения конвейера 1, а
0 лотки снабжены взаимодействующими с датчиками 8 упорами 9, при этом датчик 5 лотка 2 соединен с датчиком 8 лотка 3 и, соответственно, датчик 5 лотка 3-е датчиком 8 лотка 2 (схема соединения не показа5 на)
Лотки 2 и 3 снабжены каждый весовым механизмом, выполненным в виде упругих элементов (пружин) 10, установленных на металлоконструкциях 7, верхние торцы 11
0 которых упираются в опорные кронштейны 12 лотков при горизонтальном положении последних Упругие элементы 10 установлены на резьбовых стержнях 13 и регулируются посредством гаек 14. На
5 металлоконструкциях 7 установлены датчики 15 для фиксации наклонного положения лотков 2 и 3 под воздействием упоров 9 Под лотками 2 и 3 установлены приемные устройства 16 для высыпаемых из лотков гру0 зов. Лотки 2 и 3 установлены на металлоконструкциях 7 посредством шарниров 17.
Дозатор работает следующим образом. При горизонтальном положении одного
5 из лотков (например, лотка 2) подаваемый конвейером 1 сыпучий груз поступает в этот лоток. По мере загрузки лотка упругие элементы 10 сж имаются под воздействием возрастающей массы груза в лотке который поворачивается вниз вокруг шарнира 17.
При достижении заданной массы груза в лотке его упор б воздействует на датчик 5, подающий сигнал на выключение привода конвейера 1. Одновременно датчик 5 подает сигнал на включение привода 4 поворота лотка 2 и на возможность включения движения конвейера 1 в сторону лотка 3 датчиком 8 последнего Затем происходит поворот лотка 2 в наклонное положение и одновременно включается движение конвейера 1 ё сторону лотка 3 и следовательно, происходит загрузка этого лотка сыпучим грузом с конвейера В конце поворота лотка 2 в наклонное положение упор 9 этого лотка воздействует на датчик 15, который подает сигнал о возможности включения привода 4 на поворот лотка 2 в исходное положение для загрузки. После выдержки лотка 2 в наклонном положении в теиение промежутка времени, необходимого для полного высы- пания груза, включается обратный ход привода 4, и лоток 2 поворачивается в исходное (горизонтальное) положение, а его упор 9 воздействует на датчик 8, подающий сигнал на включение движения конвейера 1 вето-
рону лотка 2 Одновременно при достижении заданной массы груза в лотке 3 егоупор 6 воздействует на датчик 5, по сигналу кото- рого включается привод 4 поворота лотка 3 в наклонное положение и, при включенном датчике 8 лотка 2, включается движение конвейера 1 п сторону этого лотка Начинается следующий цикл работы лотка 2 и одновременно происходит разгрузка лотка 3 в последовательности, аналогичной вышеописанному циклу работы лотка 2. Формула изобретения Весовой дозатор сыпучих грузов по авт ев КЬ 1684167, отличающийся тем что, с целью повышения производительности и надежности в работе, свободный конец конвейера снабжен дополнительным лотком с приводом, весовым механизмом, датчиками включения и выключения приводов лотка и конвейера, выполненным аналогично с с- новному, причем датчик выключения привода конвейера каждого из лотков соединен с датчиком включения привода конвейера другого лотка, а привод конвейера выполнен реверсивным.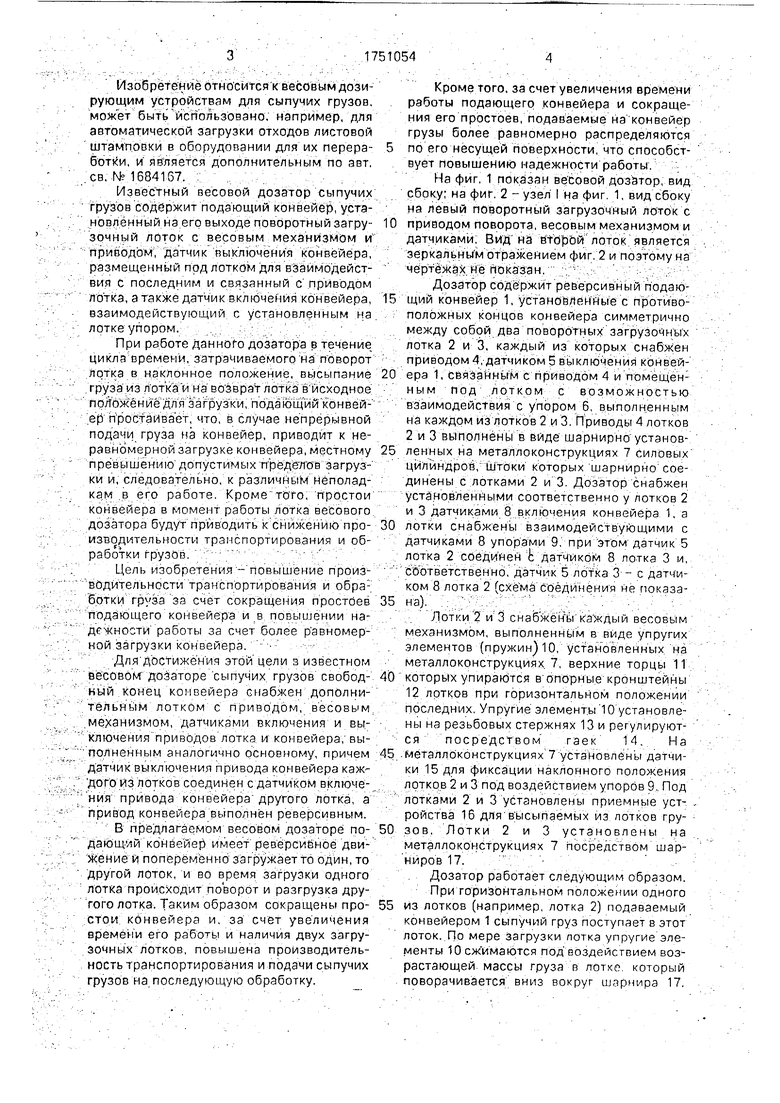
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И ДОЗИРОВАННОЙ ПОДАЧИ СЫПУЧИХ ГРУЗОВ | 1992 |
|
RU2024424C1 |
| Весовой дозатор сыпучих грузов | 1989 |
|
SU1684167A1 |
| Устройство весового дозирования шаров | 2022 |
|
RU2793069C1 |
| Установка для приготовления многокомпонентной смеси | 1988 |
|
SU1609678A1 |
| Устройство для автоматической загрузки кусковым сыпучим материалом вагонеток и т.п. емкостей | 1957 |
|
SU115469A1 |
| Склад для хранения штучных грузов | 1976 |
|
SU734088A1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ СКРЕПЛЕНИЙ | 1997 |
|
RU2126474C1 |
| Дозатор сыпучих материалов | 1978 |
|
SU925762A1 |
| СПОСОБ НЕПРЕРЫВНОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2007 |
|
RU2366904C2 |
| ВИБРАЦИОННЫЙ ДОЗАТОР | 2018 |
|
RU2679740C1 |
Использование: автоматическая загрузка отходов листовой штамповки или иных сыпучих грузов в оборудовании их переработки. Сущность изобретения: устройство содержит подающий конвейер 1 с реверсивным приводом, установленные с противоположных концов конвейера загрузочные лотки 2 и 3, каждый из которых имеет привод 4, весовой j механизм, датчик 5 выключения конвейера и датчик 8 включения конвейера При этом аатчик 5 соединен с датчиком 8. 2 ил XI ел о ел 4 ю
Фиг. 1
(6
| Весовой дозатор сыпучих грузов | 1989 |
|
SU1684167A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
