Известны канатоукладчики для грузоподъемных механизмов, включаюпдие смонтированный параллельно оси грузового барабана лебедки двухходовой винт с перемещающейся по нему кареткой, несущей ручьевой для каната ролик, с которой щарнирно сочленена серьга, имеющая датчики, взаимодействующие с канатом, направляемым роликами серьги.
Предложенный каиатоукладчик отличается от известных тем, что двухходовой винт снабжен фрикционными дисками, взаимодействующими с колодками электромагнитного тормоза, который при укладке каната удерживает винт в заторможенном положении. В момент отклонения каната от заданной оси тормоз включается на растормаживание датчиками, получающими импульс от соприкосновения с плоскостью ручьевого ролика, закрепленного на каретке. При этом каретке передается вращение, совместное с двухходовым винтом, которое продолжается до выравнивания каната.
Подобная конструкция обеспечивает равномерную укладку на барабан каната с различным диаметром.
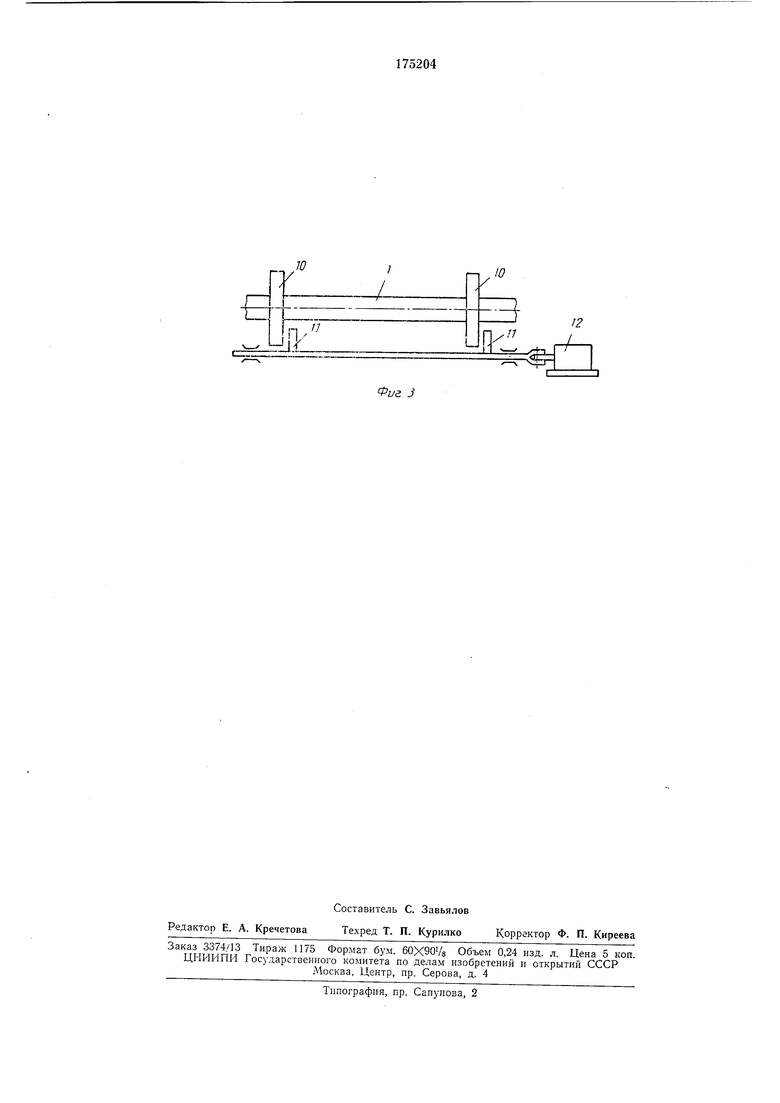
На фиг. 1 показан общий вид предложенного канатоукладчика; на фиг. 2 - канатоукладчик в момент отклонения каната; на фиг. 3 - схема взаимодействия тормоза с фрикционными дисками винта.
Канатоукладчик имеет двухходовой винт 1, установленный в подшипниках на кронштейнах 2 параллельно оси грузового барабана 3 лебедки. По винту перемещается каретка 4,
несущая ручьевой для каната 5 ролик 6 и щарнирно сочлененную с ней серьгу 7. На последней смонтированы датчики 8, взаимодействующие с боковыми плоскостями ручьевого ролика, а также укреплены направляющие
канат ролики 9. Винт снабжен фрикционными дисками 10, взаимодействующими с колодками // электромагнитного тормоза 12, который при нормальной работе укладчика удерживает винт в заторможенном положении.
Работа серьги основана на принципе неравенства линейных скоростей в ее движущейся точке. В данном случае точка .4 (место установки серьги па канат) принята за ось вращения, а радиус вращения равен
расстоянию между точками А и Б (место навеса серьги на каретку).
При отклонении каната от заданной оси точка Б получает максимальную скорость вращения, а точка А - скорость близкую к
нулю. Благодаря этому, прежде чем будет обнаружено отклонение каната от соседнего с ним витка на барабан в точке А, оно будет замечено в точке Б, как наиболее удаленной от оси вращения серьги, имеющей возросшую
включение электромагнитного тормоза 12, получившего импульс от датчика 8 при соприкосновении последнего с боковой плоскостью ручьевого ролика. Винт в этом случае растормаживается и начинает вращаться вместе с кареткой до выравнивания каната.
Предмет изобретения
Канатоукладчик для грузоподъемных механизмов, включающий смонтированный параллельно оси грузового барабана лебедки двухходовой винт с перемещающейся по нему кареткой, несущей ручьевой для каната ролик, и с щарнирно сочлененной с кареткой серьгой с датчиками, взаимодействующими с канатом, направляемым роликами серьги, огличающцйся тем, что, с целью обеспечения равномерной укладки на барабан каната с различным диаметром, двухходовой винт снабжен фрикционными дисками, взаимодействующими с колодками электромагнитного тормоза, удерживающего винт в заторможенном положении при укладке каната и в момент отклонения каната от заданной оси включаемого на растормаживание датчиками, получающими импульс от соприкосновения с плоскостью ручьевого ролика, посаженного на каретке, которая получает при этом совместное вращение с двухходовым винтом до выравнивания каната.

| название | год | авторы | номер документа |
|---|---|---|---|
| Канатоукладчик | 1979 |
|
SU880961A1 |
| Канатоукладчик | 1980 |
|
SU943190A1 |
| КАНАТОУКЛАДЧИК ДЛЯ ЛЕБЕДОК | 1996 |
|
RU2099277C1 |
| Канатоукладчик | 1976 |
|
SU596537A1 |
| КАНАТОУКЛАДЧИК ДЛЯ ЛЕБЕДОК (ВАРИАНТЫ) | 1994 |
|
RU2083451C1 |
| КАНАТОУКЛАДЧИК ЛЕБЕДКИ | 2008 |
|
RU2384518C1 |
| СТЕНД ДЛЯ ПЕРЕМОТКИ ТРОСА | 2022 |
|
RU2788263C1 |
| Канатоукладчик | 1977 |
|
SU672147A1 |
| Кабель-канатный укладчик | 1970 |
|
SU446464A1 |
| КАНАТОУКЛАДЧИК ДЛЯ ЛЕБЕДОК | 2001 |
|
RU2209176C2 |
t/ /
