.
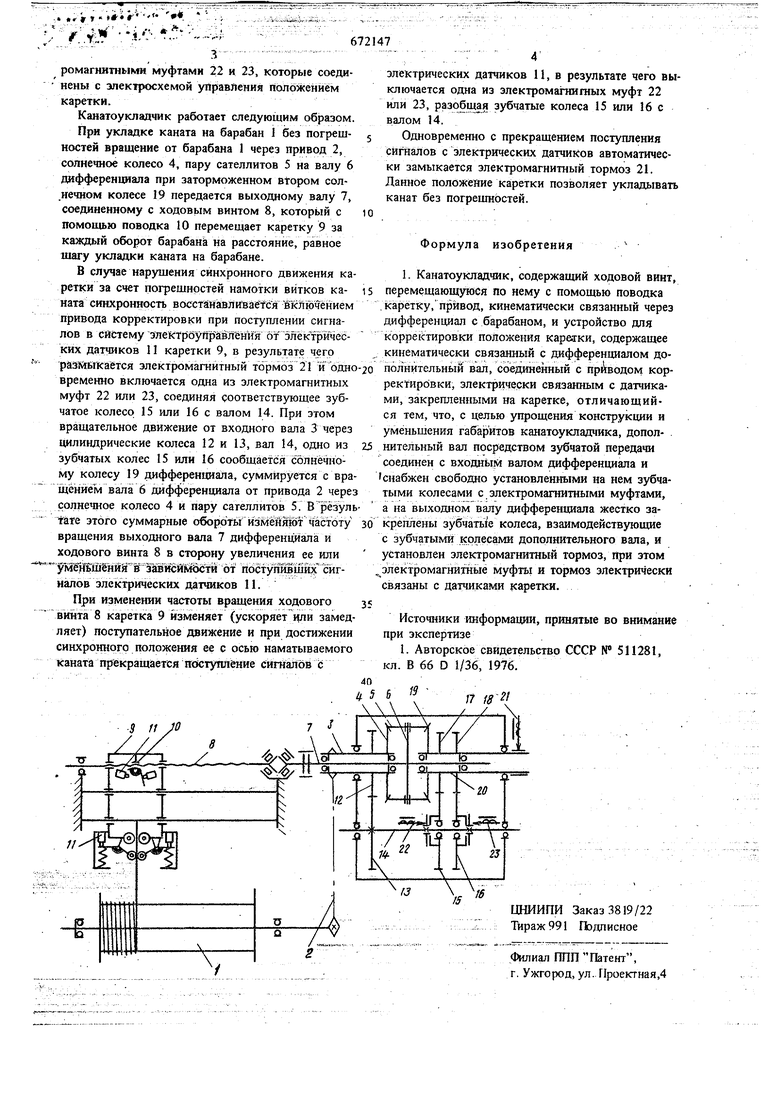
ромагнитныкт муфтами 22 и 23, которые соеди йены с электросхемой управления положением каретки. Канатоукладчик работает следующим образом. При укладке каната на барабан I без погрешностей вращение от барабана 1 через привод 2, солнечное колесо 4, пару сателлитов 5 на валу 6 дафференциала при заторможенном втором сол.нечном колесе 19 передается выходному валу 7, соединенному с ходовым винтом 8, который с помощью поводка 10 перемещает каретку 9 за каждый оборот барабан на расстояние, равное шагу укладки каната на барабане. В случае нарушения синхронного движения каретки за счет погрешностей намотки витков каната синхрош1ость вОссгаН) включением привода корректировки при поступлении сигналов в СистемузлектрбуправленМя от эле ктрйческих датчиков 11 каретки 9, в результате чего раз й Ыка1гтся электромагнитный тормоз 21 и одно временно включается одна из электромагнитных муфт 22 или 23, соединяя соответствующее зубчатое колесо 15 или 16 с валом 14. При этом вращательное движение от входного вала 3 через цилиндрические колеса 12 и 13, вал 14, одно из зубчатых колес 15 или 16 сообщается солнёчному колесу 19 диффбренциа.па, суммируется с вращением вала 6 дифференш ала от привода 2 через солнечное колесо 4 и пару сателлитов 5. Врёзуль fate зтого суммарные обороты измёйяют частоту вращения выходного вала 7 дифференциала и ходового винта 8 в сторону увеличения ее или уШнШёШЙВЖёисймЬстй от пбступившиЬГ сигналов электрических датчиков 11. При измене гаи частоты вршцения ходового винта 8 каретка 9 изменяет (ускоряет или замедляет) поступательное движение и при достижении синхронного положения ее с осью наматываемого каната прекращается поступпение сигналов с
672147 электрических датчиков 11, в результате чего выключается одна из электромагнигаых муфт 22 или 23, разобщая зубчатые колеса 15 или 16с валом 14. Одновременно с прекращением поступления сигналов с электрических датчиков автоматически замыкается электромагнитный тормоз 21. Данное положение каретки позволяет укладывать канат без погрешностей. Формула изобретения 1. Канатоукладчик, содержащий ходовой винт, перемещающуюся по нему с помощью поводка .каретку,привод, кинематически связанный через дифференциал с барабаном, и устройство для корректировки положения каретки, содержащее кинематически связанный с дифференвдалом допоЯнительный вал, соединенный с пр1 водом корректировки, электрически связанным с датчиками, закрепленными на каретке, отличающийся тем, что, с целью упрощения конструкции и уменьшения габаритов канатоукладчика, допол- . нительный вал посредством зубчатой передачи соединен с входным валом дифференциала и снабжен свободно установлентши на нем зубчатыми колесами с электромагнитными муфтами, а на выходном валу дифференциала жестко закреплены зубчать е колеса, взаимодействующие с зубчатыми колесами дополнительного вала, и установлен электромагнитный тормоз. При этом электромагнитньге муфть и тормоз электрически связаны с датчиками каретки. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 511281, кл. В 66 D 1/36, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Канатоукладчик | 1974 |
|
SU511281A1 |
| Канатоукладчик | 1979 |
|
SU844562A1 |
| Канатоукладчик | 1978 |
|
SU856968A1 |
| Канатоукладчик | 1980 |
|
SU943190A1 |
| Канатоукладчик лебедки | 1969 |
|
SU437708A1 |
| Устройство для укладки каната на барабан лебедки | 1979 |
|
SU874592A1 |
| Лебедка | 1985 |
|
SU1446096A1 |
| КАНАТОУКЛАДЧИК | 1972 |
|
SU360316A1 |
| Канатоукладчик | 1979 |
|
SU785185A1 |
| Механизм привода задних валов отбора мощности универсально-пропашного трактора | 1990 |
|
SU1782785A1 |
