10
15
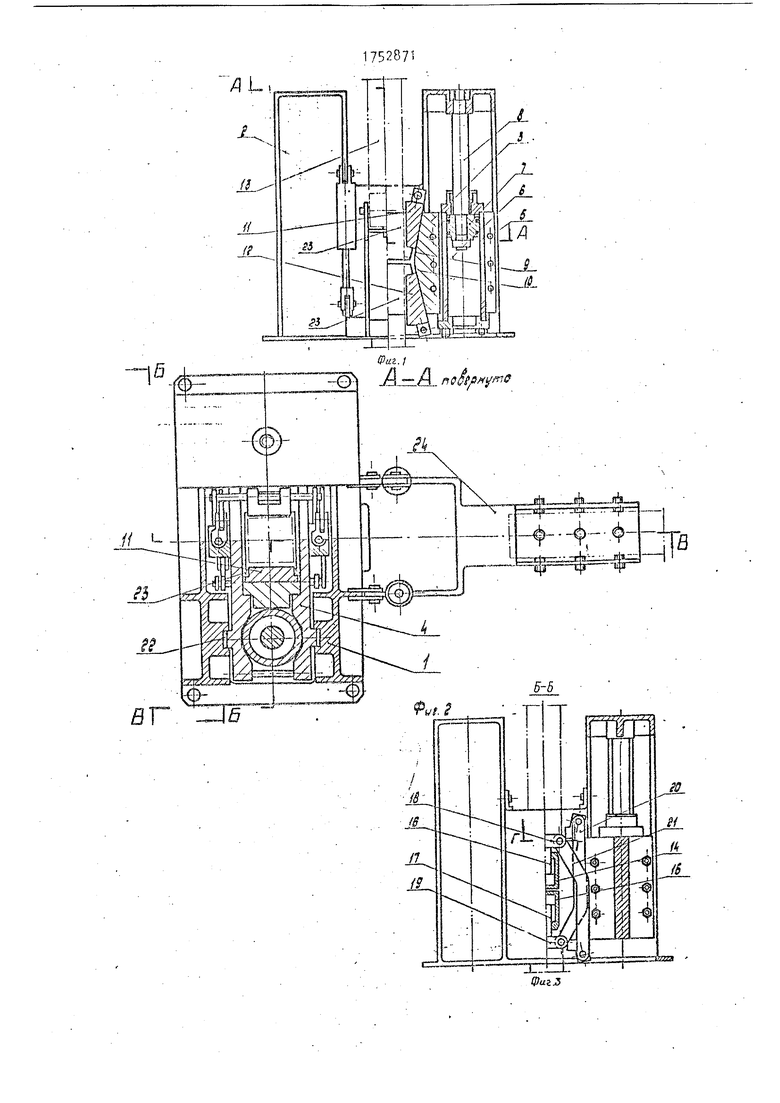
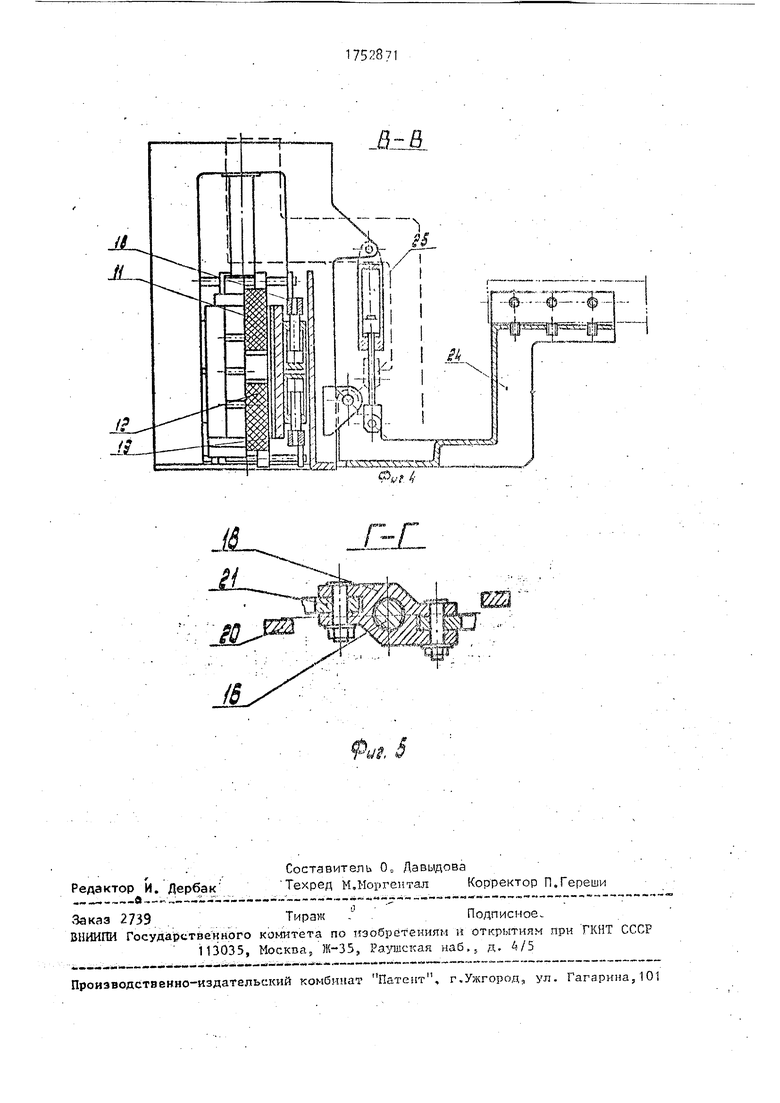
щий иэ двух щек k, втянутых шпильками 5. Ползун 3 перемещается при помощи гидроцилиндров 6, размещенных в ползуне « перемещающихся вместе с ним по поршню 7, смонтированному на штоке 8, жестко укрепленном в верхней части выступа 2. Рабочие поверхности пол™ зуна 3 выполнены с пирамидальными вые-1 тупами 9 и ТП с возможностью перемещения, по которым установлены пара верхних зажимных клиньев 11 и пара нижних зажимных клиньев 12 для зажима стержневого элемента 13- Клинья имеют своей привод в виде двух гидроцилиндров 1 для нижней пары клиньев 12 и двух гидроцилиндров 15 для верхней пары зажимных клиньев 11, при этом гидроцилиндры 14 и 15 попарно расположены симметрично оси стержневого элемен-20 та 13 с наружной стороны щек ( ползуна 3, а гидроцилиндры 1 t смонтированы над гидроцилиндрами 15. Шюки 16 и 17 гидроцилиндров 15 передают усилия на клинья 12 и 11 соответственно через коромысла 18 и 19, о которых шаркчрно закреплены рычаги 20 верхних клиньев 11, рычаги 21 нижних клиньев 12, при этом гидроцилиндры 14 и 15 осуществляют рабочее движение в противоположных направлениях, а рычажные системы 20 и 21 выполнены взаимосмм метричными и- направлены в противоположные стороны. Ползун 3 перемещается по направляющим 22 корпуса 1. Ча ренней поверхности щек b попзуна 3 установлены распорные-плитн 23, служа щие клиньям t1 и 12, направляющие и предохраняющие их от западанил в холостом положении.
Устройство работает следующим образом.
Стержневой элемент 13 (или его отрезок при работе в подвальных помеце25
в исходное положение. Подачей рабочей жидкости в штоковую полость гидроци- лиидров 6 ползун 3 поднимается вверх на величину рабочего хода цилиндра. Осуществляется зажим элемента 13 парой нижних клиньев 1 путем подачи рабочрй жидкости в поршневую полость гуидроцилиндров 4. Усилием гидроцилинд- Йов 6 ползун 3 погружает зажатый клиньями 12 элемент 13 на величину хода цилиндра 6. Затем клинья 12 отжимаются, ползун 3 с кпиньями поднимается и цикл погружения повторяют. При из1 влечении строительных элементов 13 в работе участвую верхние клинья 11 и гидроципиндры 15; рабочий ход пол-чуна гапрарлзн вверх. Распорные плиты 23 предохраняют клинья 11 и 12 от зчна- дани;, в нерабочем положении и являют™ ся для них направляющими.
Формула изобретения
1. Устройство для погружения и из- впечепия стержневых элементов, содержащее корпус, оазмещенные в нем полый ползун и зажимное приспособление в ви30
возможностью контакта с внутренней поверхностью ползуна, и силовые цилиндры дмя перемещения ползуна и клиньев, отличающееся тем, что, с цель) снижения габаритов, силовые ци- BHVT-JC; линдры ползуна размещены коаксиально ему, который выполнен в виде двух сборных элементов с пирамидальными выступами на боковых поверхностях и жестко связанных с его силовыми пи- , а силовой цилиндр каждой из пар клиньев зажимного приспособления размещен соосно по обе стороны ползуна и связан с соответствующими кпиньями через взаимно перекрещивающи40
ниях) укладывают на поворотное устрой-45 еся и разнонаправленные рычаги.
ство 2k и с помощью гидроцилиндра 25 устанавливают в рабочее положение ма ось устройства через свободное пространство между выступами 2 коппуса 1,
2. Устройство по п. 1, о г л и - чающееся тем, что оно снабжено поворотным подающим узлом для стержневых элементов, смонтированным на бокопри этом клинья 11 и 12 разжаты. Затем ЯО воп поверхности корпуса, выполненного поворотное устройство 2 t возвращается П-обра зной Формы.
5
5
в исходное положение. Подачей рабочей жидкости в штоковую полость гидроци- лиидров 6 ползун 3 поднимается вверх на величину рабочего хода цилиндра. Осуществляется зажим элемента 13 парой нижних клиньев 1 путем подачи рабочрй жидкости в поршневую полость гуидроцилиндров 4. Усилием гидроцилинд- Йов 6 ползун 3 погружает зажатый клиньями 12 элемент 13 на величину хода цилиндра 6. Затем клинья 12 отжимаются, ползун 3 с кпиньями поднимается и цикл погружения повторяют. При из1 влечении строительных элементов 13 в работе участвую верхние клинья 11 и гидроципиндры 15; рабочий ход пол-чуна гапрарлзн вверх. Распорные плиты 23 предохраняют клинья 11 и 12 от зчна- дани;, в нерабочем положении и являют™ ся для них направляющими.
Формула изобретения
1. Устройство для погружения и из- впечепия стержневых элементов, содержащее корпус, оазмещенные в нем полый ползун и зажимное приспособление в ви2. Устройство по п. 1, о г л и - чающееся тем, что оно снабжено поворотным подающим узлом для стержневых элементов, смонтированным на бокоЧ -Н-fc 11
r-
co
csi LT1 Ггглззгта о.гА... &vt 4
,,, J-j
JbS.
el,
fOb..:.A.
о.гА...
,,, J-j
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разрушения монолитных объектов | 1985 |
|
SU1265325A1 |
| Устройство для образования полостей в грунте | 1979 |
|
SU857348A1 |
| Гидроклин | 1984 |
|
SU1167327A1 |
| Гидроклиновое устройство для разрушения монолитных объектов | 1984 |
|
SU1198201A1 |
| Самоцентрирующая планшайба | 1981 |
|
SU1028434A1 |
| Гидроклиновое устройство для разрушения горных пород | 1981 |
|
SU998752A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ КЛИНЬЕВ ИЗ ПАЗОВ СТАТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 2009 |
|
RU2389123C1 |
| Гидроклиновое устройство | 1983 |
|
SU1090869A1 |
| Штамп для вытяжки крупногабаритных изделий | 1977 |
|
SU677789A2 |
| Устройство для бестраншейной прокладки трубопроводов | 1985 |
|
SU1258953A1 |