Изобретение относится к землеройным машинам, преимущественно к роторным экскаваторам для рытья котлованов, каналов, траншей, а также для разработки карьеров.
Известно рабочее оборудование роторного экскаватора, включающее установленный на раме ротор с размещенными на нем ковшами, имеющими механизм разгрузки.
Недостатком известного рабочего оборудования роторного экскаватора является сложность конструкции механизма разгрузки ковшей.
Известен также рабочий орган роторного экскаватора с центробежной разгрузкой, содержащий ротор с установленными по периферии ковшами, каждый из которых имеет жестко связанное с козырьком днище ъ виде пространственного каркаса с цепным днищем, причем каждый пространственный каркас связан с основанием посредством горизонтального ша рнира и ус танбале Н с возможностью качания в плоскости ротора, при этом пространственный каркас и основание имеют упоры для ограничения угла качания пространственного каркаса.
Недостатком этого рабочего органа является сложность конструкции ковшей. Кроме этого, при работе устройства разработанный грунт удерживается от преждевременного выпадания из ковшей поверхностью забоя и дуговым щитком примыкающим к забою, что приводит к дополнительным затратам энергии на преодоление работы сил трения, возникающих
v| СЛ 00
Ю
между грунтом в ковшах, поверхностью забоя и поверхностью дугового щитка.
Цель изобретения - упрощение конструкции и снижение энергоемкости процесса копания.
Поставленная цель достигается тем, что в рабочем оборудовании роторного экскаватора с инерционной разгрузкой, включающем стрелу, установленный на ней ротор с приводным валом, кинематически связанный с приводным двигателем, ковши, установленные на периферии ротора, приводной вал ротора выполнен эксцентриковым, а кинематическая связь ротора с приводным двигателем выполнена в виде планетарного редуктора, центрально зубчатое колесо которого жестко связано со стрелой, а сателлит жестко связан с ротором и установлен соосно с ним, причем передаточное отношение планетарного редуктора от водила к сателлиту -z, где z - число ковшей ротора, не равное единице.
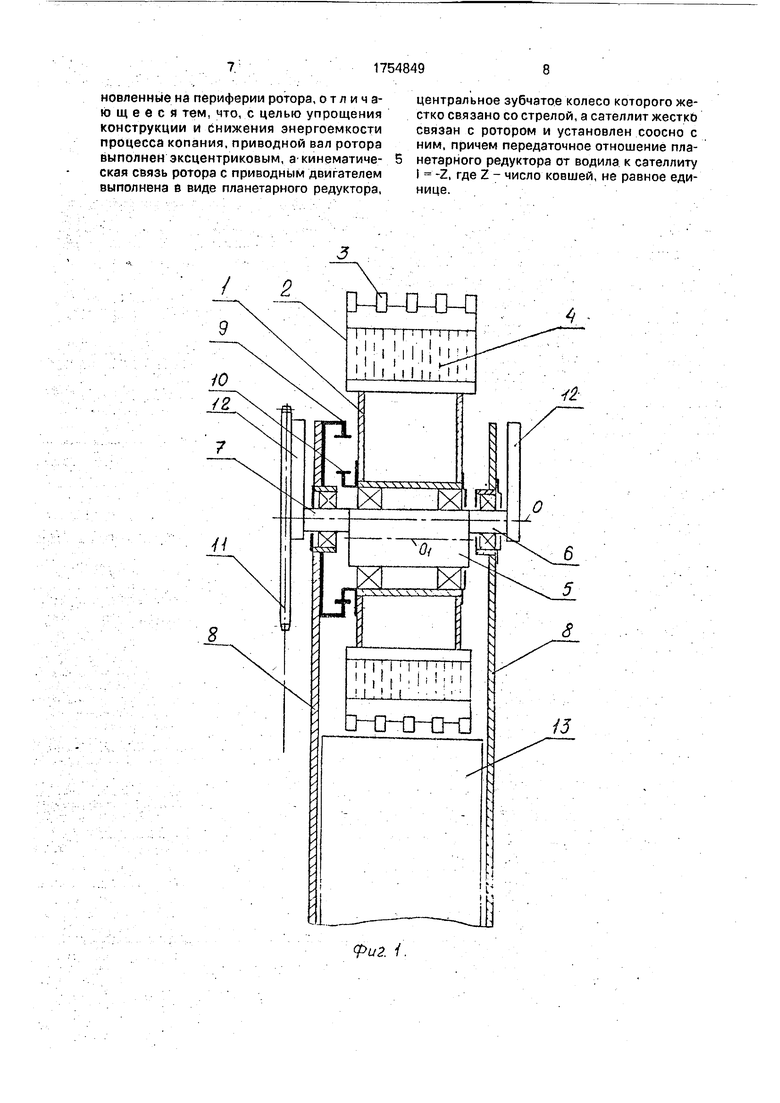
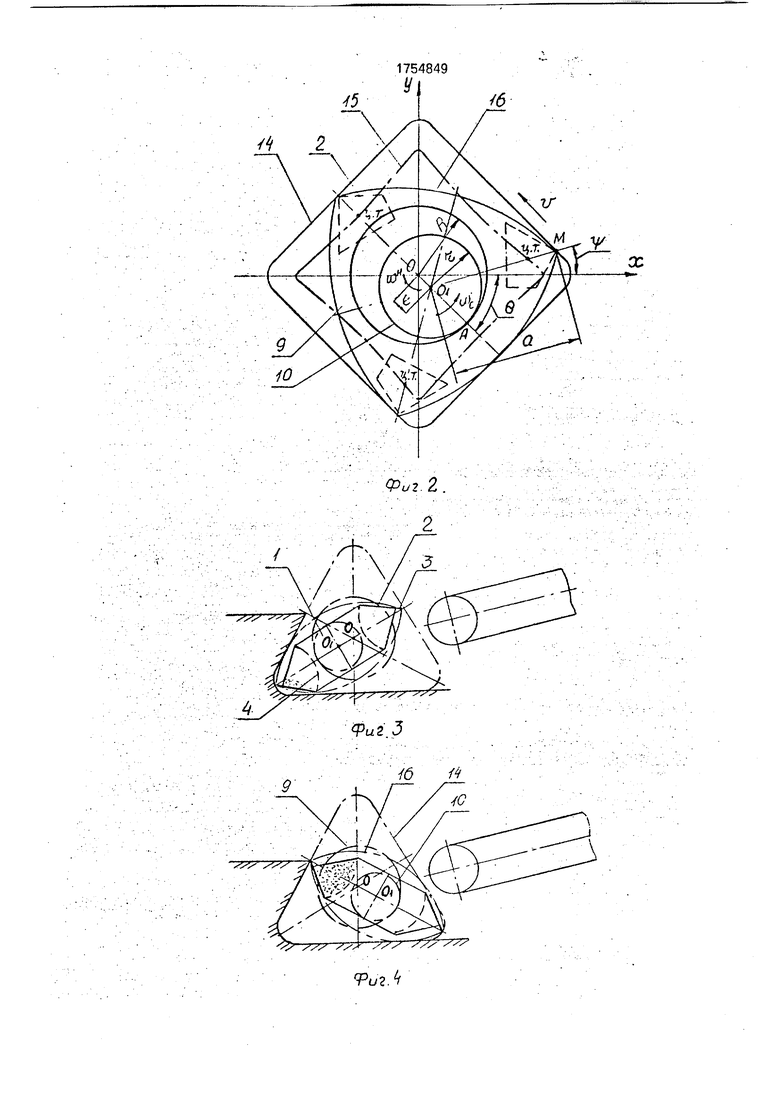
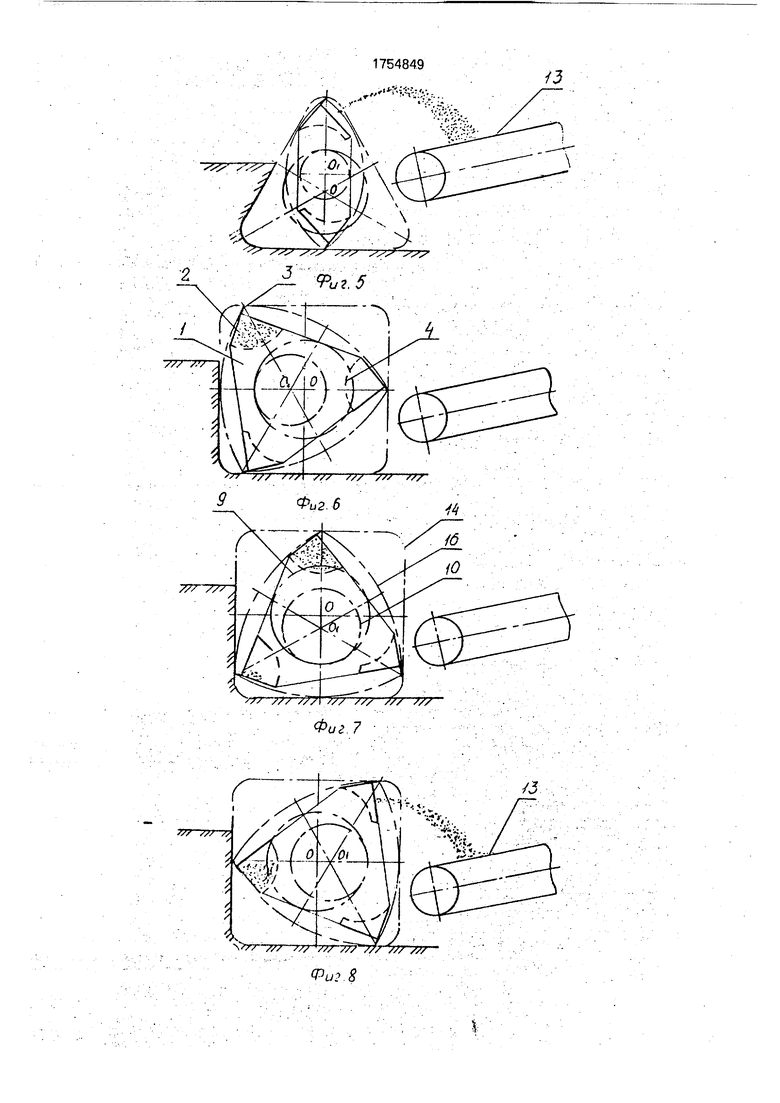
На фиг. 1 изображен общий вид рабочего органа экскаватора; на фиг, 2 - траектории движения элементов ковшей; на фиг. 3-5 - положения вращающегося ротора с числом ковшей z 2; на фиг. 6-8 - положения вращающегося ротора с числом ковшей z 3; на фиг. 9-11 - положения вращающегося ротора с числом ковшей z 4.
Рабочее оборудование роторного экскаватора содержит ротор 1 с установленными по его периферии ковшами 2, оснащенными режущими элементами (резцами) 3. Ковши выполнены с цепным днищем 4, либо со сплошным днищем. При- вал ротора выполнен эксцентриковым - с эксцентриком 5 и опорными шейками 6 и 7, посредством которых вал через подшипники опирается на боковины 8 стрелы.
Ротор 1 установлен с возможностью вращения на эксцентриковой части приводного вала и кинематически связан с привод- ным двигателем через планетарный редуктор, который состоит из центрального зубчатого колеса 9, закрепленного на боковине 8 стрелы, и сателлита 10, жестко и соосно связанного с ротором 1 (на фиг, 3-11 центральное зубчатое колесо 9 и сателлит 10 условно показаны окружностями, выполненными штрих-пунктирными линиями). Функции водила выполняет эксцентрик 5 приводного вала. Отношение радиусов центрального колеса R и сателлита г планетарного редуктора R/r (z + 1)/z, где z - число ковшей ротора (целое число, не равное единице). Длина водила (величина эксцентриситета эксцентрика) е R - г. Радиус центрального колеса R e(z + 1), а радиус
сателлита г ze. Передаточное отношение планетарного редуктора от водила к сателлиту
(Он г ze
We
I
r-R
-е
: -z,
где UH - угловая скорость водила; (Ос - угловая скорость сателлита. Знак (-) перед г указывает на то, что направления вращения
водила и сателлита противоположные. Угловая скорость водила Шн - -z сУе, а угол поворота водила вокруг оси О в яр, где угол поворота сателлита (ротора) вокруг оси OL
Вал ротора приводится во вращение с помощью цепной передачи через ведомую звездочку 11. На концах вала установлены противовесы 12. На стреле расположен приемный конвейер 13.
Рабочее оборудование роторного экскаватора с инерционной разгрузкой работает следующим образом, При вращении приводного вала сателлит 10, обкатываясь внутри зубчатого колеса 9, совершает планетарное движение - вращательное движение вокруг двух параллельных осей: вокруг оси 0| эксцентрика и вместе с эксцентриком - водилом вокруг оси О опорных шеек б и 7 приводного вала. Вместе с сателлитом
10 планетарное движение совершает и жестко связанный с ним ковшовый ротор 1.
Точки ковшей при движении описывают траектории в виде гипоциклоид. В частности, точки М режущих кромок ковшей описываюТ одну и ту же гипоциклоиду 14 практически с прямолинейными ветвями, а центры тяжести ковшей (ц.т.) - одну и ту же гипоциклоиду 15 (фиг. 2).
Резцы 3 ковшей 2, перемещаясь прямолинейно и взаимодействуя с поверхностью забоя, разрабатывают грунт. Отделенный от забоя грунт поступает в ковши.
Уравнение гипоциклоиды в параметрической форме
х е cos 0+ a cos Ц
у -е sin в+ a sin , (1J
з
где а - производящий радиус (расстояние от центра сателлита до производящей точки) После преобразований
1 х г( - cosz + с cos Щ
551
y r(- -sinz + t )
где С а/г - параметр формы гипоциклоиды.
Форма и количество ветвей гипоциклоиды зависят от соотношения радиусов R зубчатого колеса 9 и г сателлита и от отношения С а/г.
Если радиусы R и г относятся как целые числа, отличающиеся на единицу, например, R/r (z + 1)/z 3/2; 4/3; 5/4 и т.д., то каждая из соответствующих гипоциклоид есть замкнутая плоская кривая, у которой z + 1 конгруентных ветвей и столько же вер- шин (равносторонний треугольник (фиг. 3- 5), квадрат (фиг. 2, 6-8), пятиугольник (фиг. 9-11 и т.д.). В зависимости от величины отношения с а/г ветви гипоциклоиды, в общем случае, могут быть вогнутыми, выпуклыми или иметь прямолинейные участки. В частности, при (z - 1) z ветви гипоциклоиды практически совпадают с прямыми линиями.
В контур гипоциклоиды 14 вписывается свободно ориентирующаяся в нем равносторонняя плоская фигура 16, у которой z вершин и столько же ветвей, т. е. на одну меньше, чем у самой гипоциклоиды (линза - фиг, 3-5), треугольник - фиг. 2, 6-8), квадрат (фиг. 9-11) и т. д. Если такую фигуру жестко связать с сателлитом, то при вращении водила ее вершины будут описывать исходную гипоциклоиду 14, а боковые стороны будут перекатываться по ветвям гипоциклоиды, не выходя за ее контуры. Ковши 2 расположены внутри фигуры 16, вписанной в контур гипоциклоиды. При этом точки режущих кромок резцов 3 совпадают с вершинами этой фигуры, а передние стенки не выступают за ее контур. Такое расположение ковшей позволяет исключить трение их передних стенок о разрабатываемый грунт.
При планетарном движении ротора точ- ки ковшей, описываемая траектории в виде гипоциклоид, движутся с переменными скоростями, зависящими от угла Ц) поворота ротора (сателлита)
v (WczeV 1 + с2 - 2с cos(z + 1) . (3)
При этом скорости точек ковшей, в том числе и центров тяжести, периодически изменяются от минимального значения vmm (с - 1), когда точки находятся в вершинах гипоциклоиды до максимального значения vmax (Jkze(c + 1), когда точки находятся в середине ветви гипоциклоиды, Таким образом, при движении от вершины до середины каждой из ветвей гипоциклоиды, ковши вместе с находящимся в них грунтом движутся с ускорением. От середины ветви до следующей вершины движение
ковшей замедляется, а грунт продолжает двигаться по инерции. Однако, при движении ковшей вверх по восходящим ветвям гипоциклоиды, движение грунта за счет действия гравитационных сил также замедляется и грунт остается в ковшах.
Разгрузка ковшей 2, в зависимости от угловой скорости ротора 1, осуществляется, когда центр тяжести ковшей описывает верхнюю наклонную восходящую, горизонтальную, либо непосредственно следующую за ней нисходящую ветви гипоциклоиды. При этом грунт, после начала замедления движения ковша, продолжая двигаться по инерции с максимальной скоростью, выбрасывается из ковша и падает на конвейер 13.
Цепное днище 4 в момент замедления движения ковша продолжает некоторое время двигаться по инерции с максимальной скоростью и, воздействуя на грунт, также способствует его выгрузке из ковша. Когда ковш резко изменяет траекторию движения (вершина гипоциклоиды), цепное днище встряхивается и очищается от налипшего на него грунта.
Таким образом, жесткая связь ковшового ротора с сателлитом планетарного редуктора с передаточным отношением от водила к сателлиту, равным числу ковшей - z. обеспечивает планетарное движение ротора и перемещение одноименных точек ковшей по одним и тем же траекториям - гипоциклоидам с ускорением, что позволяет осуществить инерционную разгрузку ков шей при сравнительно простой их конструкции, реализовать различные частоты вращения и моменты на роторе при неизменной частоте вращения и мощности на приводном валу.
Планетарное движение ковшового ротора позволяет также реализовать разработку котлованов и карьеров с плоской поверхностью забоя с различным углом наклона к горизонту.
Взаимодействие режущих элементов ковшей с забоем осуществляется в процессе их перемещения по прямой линии, а не по дуге окружности, что исключает возникновение центробежных сил инерции и их действие на грунт, находящийся в ковшах, а, следовательно, и потери энергии на трение грунта о поверхность забоя.
Формула изобретения Рабочее оборудование роторного экскаватора с инерционной разгрузкой, включающее стрелу, установленный на ней ротор с приводным валом, кинематически связанный с приводным двигателем, ковши, установленные на периферии ротора, отличающееся тем, что, с целью упрощения конструкции и снижения энергоемкости процесса копания, приводной вал ротора
центральное зубчатое колесо которого жестко связано со стрелой, а сателлит жестко связан с ротором и установлен соосно с ним, причем передаточное отношение плавыполнен эксцентриковым, а кинематиче- 5 нетарного редуктора от водила к сателлиту екая связь ротора с приводным двигателем I -Z, где Z - число ковшей, не равное еди- выполнена в виде планетарного редуктора, нице
центральное зубчатое колесо которого жестко связано со стрелой, а сателлит жестко связан с ротором и установлен соосно с ним, причем передаточное отношение пла
| название | год | авторы | номер документа |
|---|---|---|---|
| Валковая дробилка | 1990 |
|
SU1726017A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С ПСЕВДОЦЕВОЧНЫМ ЗАЦЕПЛЕНИЕМ | 2011 |
|
RU2502904C2 |
| Планетарный редуктор | 1980 |
|
SU954671A1 |
| Бесшатунный механизм | 2023 |
|
RU2805423C1 |
| СООСНЫЙ РЕДУКТОР | 2013 |
|
RU2529943C1 |
| ПЕРИСТАЛЬТИЧЕСКИЙ НАСОС | 1994 |
|
RU2067219C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2381078C2 |
| Привод, в частности, для несущего винта летательного аппарата с несущим винтом | 2020 |
|
RU2802265C2 |
| Устройство для обработки деталей, очерченных эпи- и гипоциклоидами | 1978 |
|
SU778949A1 |

Использование: изобретение относится к землеройным машинам, преимущественно к роторным экскаваторам. Сущность изобретения: рабочее оборудование роторного экскаватора включает стрелу, установленный на ней ротор с установленными по его периферии ковшами. Приводной вал ротора кинематически связан с приводным двигателем планетарным редуктором. Приводной вал ротора выполнен эксцентриковым. Планетарный редуктор состоит из центрального зубчатого колеса, закрепленного на боковине стрелы, и сателлита, жес тко и соосно связанного с ротором. Функции водила выполняет эксцентрик приводного вала. Передаточное отношение планетарного редуктора от водила к сателлиту i -Z, где Z - число ковшей, не равное единице. При вращении приводного вала сат еллит, обкатываясь внутри зубчатого колеса, совершает вращательное движение вокруг двух параллельных осей. Вместе с сателлитом планетарное движение совершает и жестко связанный с ним ротор 1.11 ил. ё
/
о
4
о-о--о-а
/j
i
Л
Ри2 1
P/
/
6t-8l7Sil
X-.X Л - jZ h
#
Х
d
&
Фиг. 3
//} /V/-7// SJ9
Фиг. W
/ S/f
/3
f S 77/ s/s
| Рабочий орган роторного экскаватора | 1986 |
|
SU1355675A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рабочий орган роторного экскаватора с центробежной разгрузкой | 1987 |
|
SU1479572A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
