Изобретение относится к землеройной технике, а именно к рабочим органам непрерывного действия.
Цель изобретения - повышение производительности за счет улучшения условий разгрузки и снижение энергоемкости.
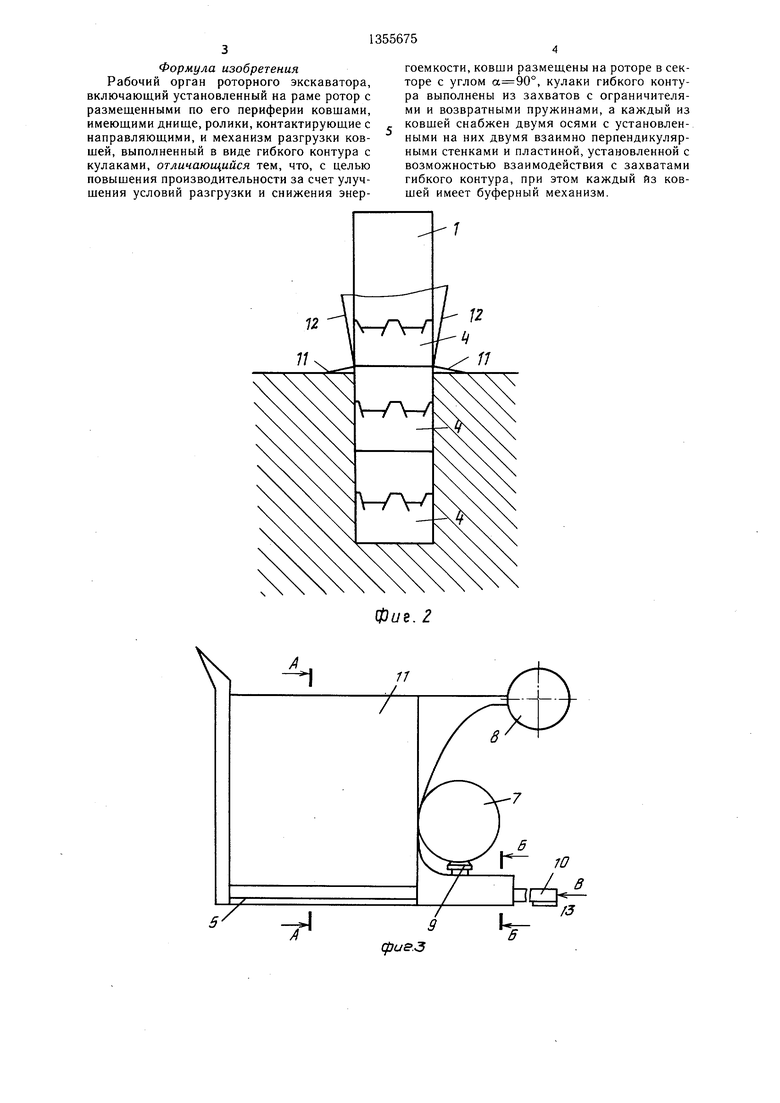
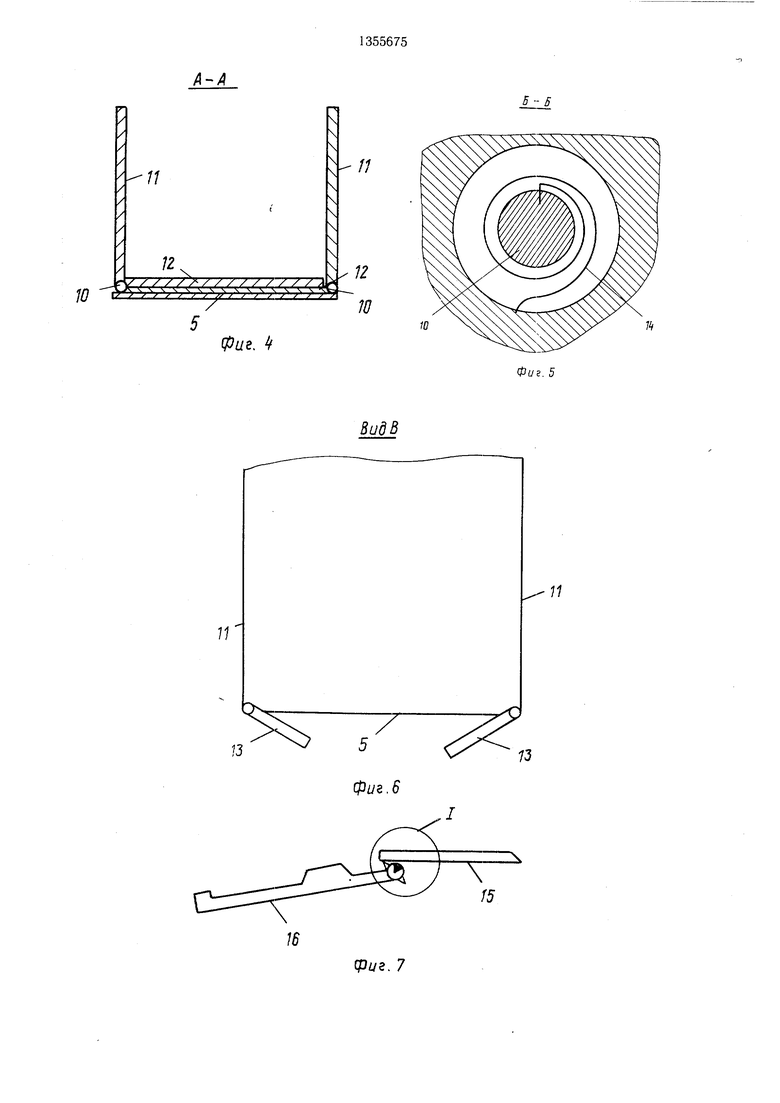
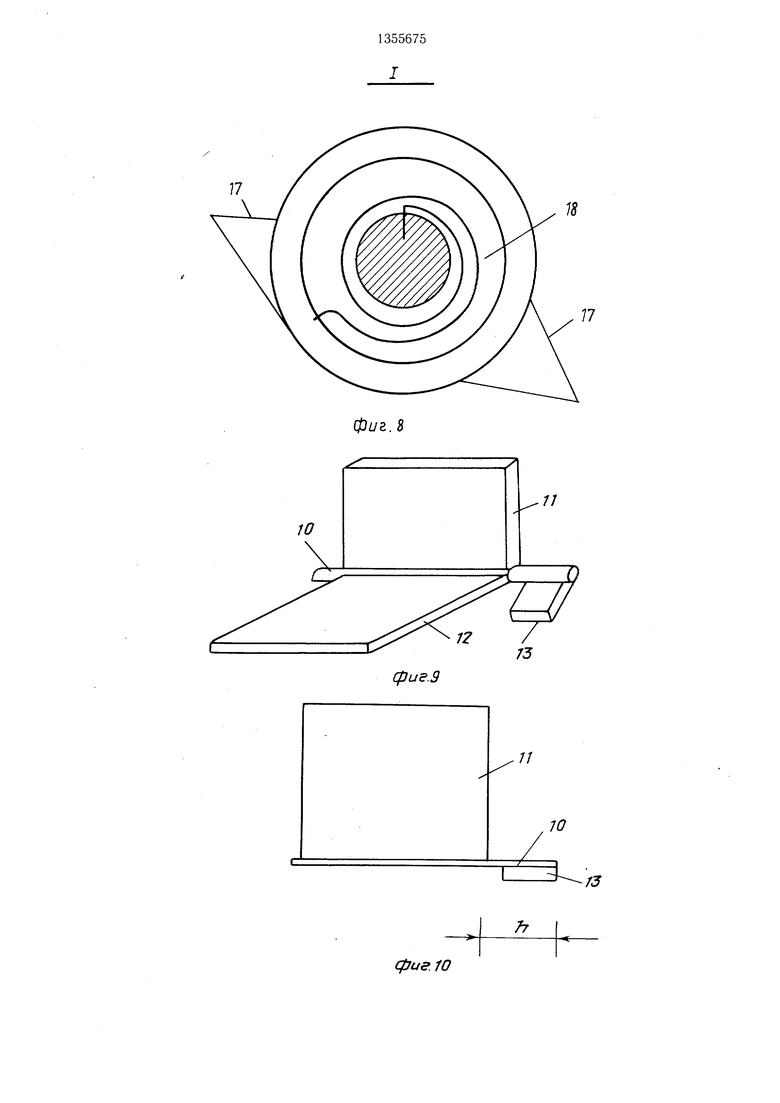
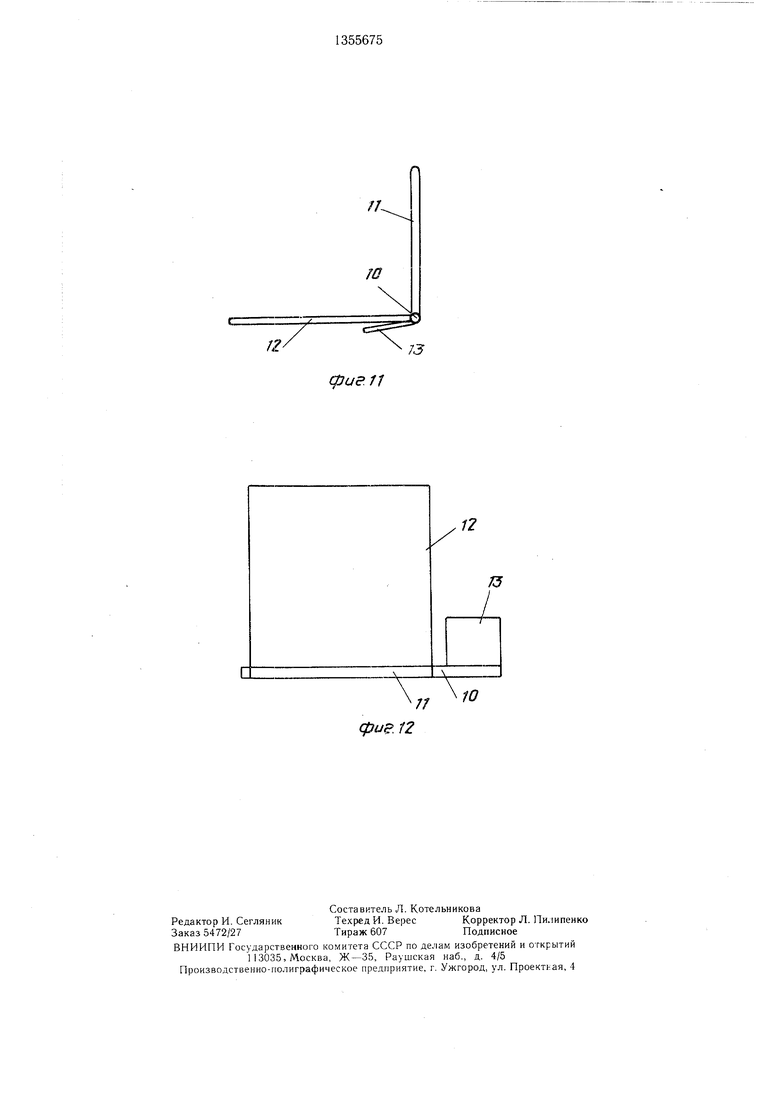
На фиг. 1 изображен общий вид рабочего органа; на фиг. 2 - схема разгрузки ковша при выходе из забоя; на фиг. 3 - ковш, вид сбоку; на фиг. 4 - сечение А-А на фиг. 3; на фиг. 5 - сечение Б-Б на фиг. 3; на фиг. 6 - вид В на фиг. 3; на фиг. 7 - кулак, закрепленный на гибком контуре; на фиг. 8 - узел I на фиг. 7; на фиг. 9 - 12 чертеж и аксонометрическая проекция двух взаимно перпендикулярных стенок и пластины, закрепленных на оси.
Рабочий орган роторного экскаватора включает роторное колесо 1 с направляю- Ш.ИМИ 2 и 3, на которых с возможностью перемещения установлены ковши 4 с днищем 5, снабженные буферным механизмом 6, установленные на ковшах ролики 7 и 8 и пружину 9, и механизм разгрузки. ковшей, включающий две оси 10 с закрепленными на каждой из них двумя взаимно перпендикулярными стенками 1 и 12, одной пластиной 13 и спиральной пружиной 14. На раме установлен гибкий контур 15 с кулаками, выполненными в виде захватов 16, на которых установлены ограничители 17 и возвратная пружина 18. Ковши размещены на роторе в секторе с углом .
Рабочий орган работает следующим образом.
При выходе ковша 4 из забоя контур 15, двигаясь со скоростью большей, чем окружная скорость роторного колеса, подводит к нему захват 16, профиль которого выполнен так, чтобы контакт захвата 16 с пластинами 13 происходил раньше, чем с днищем 5 ковша 4. При контакте захвата 16 с приводными пластинами 13 на ковш 4 начинает действовать момент силы Р давления захвата 16, равный по величине P-h, где h - длина выступающей части оси 10; Р - сила давления захвата 16, , где G - вес грунта в ковше 4. Действие этого момента способствует фиксации ковша 4 на роторном колесе 1. Захват 16, взаимодействуя с пластинами 13, проворачивает их, а вместе с ними проворачиваются стенки 11 и 12, что приводит к разгрузке ковша 4. Пластины 13 установлены на оси 10 с наклоном относительно линии днища ковша 4 с таким расчетом, чтобы, проворачиваясь, они, а вместе с ними и стенки 11 и 12, описывали дугу более 90°, что обеспечит полную разгрузку ковша 4. Повернув пластины 13 в вертикальное положение, захват 16 не создает больше момента, способствующего фиксированию ковше.й 4 на роторном колесе 1, только удерживает стенки 11 и 12 в раскрытом положении. В дальнейшем захват 16 вследствие того, что скорость транспортера больше скорости роторного колеса, вступая во взаимодействие
с днищем 5 ковша 4, проворачивает ковш 4 вокруг оси ролика 7, что приводит к растор- маживанию фиксирующего устройства, а ковщ 4 получает возможность двигаться по
направляющим 2 и 3 роторного колеса 1 со скоростью контура 15. Скорость гибкого контура 15 больше окружной скорости роторного колеса 1. Описав вместе с ковшом 4 дугу, определяемую углом 90°-|-р, где р arcig f, где - коэффициент трения качения материала роликов 7 и 8 по материалу направляющих 2 и 3, захват 16 выходит из зацепления с ковщом 4. При этом под действием возвратной пружины 14 стенки 11 и 12 на ковще 4 устанавливаются в первоначальное (закрытое) положение. Такая принудительная разгрузка ковша не требует обеспечения условий разгрузки, ограничивающих скорость вращения ротора.
0
5
0
5
0
5
0
5
ния
значение, равное ,
Освободившийся от захвата 16 ковш 4 имеет в момент освобождения от захвата 16 потенциальную энергию, равную
. .
mgH- - 4--{-, где т - масса ковша 4;
g - ускорение свободного падения ковша 4; Н - высота, на которой находится ковш 4; V - скорость роторного колеса; Уч - скорость гибкого контура. Эта энергия при движении ковша 4 по направляющим 2 и 3 роторного колеса 1 переходит в кинетическую, достигающую в точке начала реза,
г-2где Vo V2g77J и полностью расходуется на совершение работы по динамическому разрушению грунта, что с;нижает энергоемкость процесса копания.
Соприкасаясь с грунтом, ковш 4 под действием сил сопротивления грунта резанию проворачивается вокруг оси ролика 7, что приводит к заклиниванию ролика 7 между ковшом 4 и направляющей 2 роторного колеса 1 и предотвращает движение ковша 4 в направлении обратном копанию. Ковш 4, двигаясь совместно с роторным колесом 1, режет грунт до выхода из забоя, после чего цикл повторяется. Вследствие того, что скорость движения ковша 4 по направляющим 2 и 3 роторного колеса 1 больше окружной скорости роторного колеса, участок дуги окружности роторного колеса 1, определяемый углом , не требует установки ковшей.
Буферный механизм 6 предотвращает сближение ковшей 4 более чем на шаг л (2,5...3)4, где /к -- длина ковша. Возвратная пружина 18 прижимает захват 16 к гибкому контуру 15, чем обеспечивается компактность этого устройства, а ограничителя 17 обеспечивают жесткость при захвате ковша 4 и ограничивают возвратное действие пружины 18.
Формула изобретения Рабочий орган роторного экскаватора, включающий установленный на раме ротор с размещенными по его периферии ковщами, имеющими днище, ролики, контактирующие с направляющими, и механизм разгрузки ков- щей, выполненный в виде гибкого контура с кулаками, отличающийся тем, что, с целью повыщения производительности за счет улуч- щения условий разгрузки и снижения энергоемкости, ковщи размещены на роторе в секторе с углом , кулаки гибкого контура выполнены из захватов с ограничителями и возвратными пружинами, а каждый из ковщей снабжен двумя осями с установленными на них двумя взаимно перпендикулярными стенками и пластиной, установленной с возможностью взаимодействия с захватами гибкого контура, при этом каждый из ков- щей имеет буферный механизм.
Фиъ. 2
-ri
7/
/
фи&.З
Ю
Фиг.
т
П
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган землеройно-метательной машины | 1977 |
|
SU732452A1 |
| Рабочий орган роторного экскаватора | 1979 |
|
SU771258A1 |
| Рабочий орган роторного экскаватора | 1986 |
|
SU1350266A1 |
| Рабочий орган роторного экскаватора | 1978 |
|
SU819268A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ РОТОРНОГО ЭКСКАВАТОРА | 1972 |
|
SU340741A1 |
| Рабочее оборудование роторного экскаватора с инерционной разгрузкой | 1990 |
|
SU1754849A1 |
| КОВШ РОТОРНОГО РАБОЧЕГО ОРГАНА С ЦЕНТРОБЕЖНОЙ РАЗГРУЗКОЙ ГРУНТА | 1967 |
|
SU190277A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ РОТОРНОГО ЭКСКАВАТОРА | 1969 |
|
SU237717A1 |
| Рабочий орган траншейной машины | 1979 |
|
SU815151A2 |
| Рабочий орган с центробежной разгрузкой несвязного грунта для роторного экскаватора | 1964 |
|
SU195980A1 |
Изобретение относится к землеройной технике, а именно к рабочим органам непрерывного действия. Цель изобретения - повышение производительности за счет улучшения условий разгрузки и снижение энергоемкости. Для этого ковши (К) 4 размеш,е- ны на роторе 1 в секторе под углом . Каждый К 4 имеет буферный механизм 6 и две оси с закрепленными на них двумя взаимно перпендикулярными стенками и пластиной. Кулаки гибкого контура 15 механизма разгрузки К 4 выполнены в виде захватов 16, на которых установлены ограничители и возвратные пружины. При выходе К 4 из забоя контур 15, двигаясь со скоростью большей, чем окружная скорость роторного колеса 1, подводит к К 4 захват 16 так, чтобы его контакт с пластинами на К 4 происходил раньше, чем контакт с дниш,ем 5. Взаимодействуя с пластинами на К 4, захват 16 проворачивает их, а вместе с ним и проворачиваются стенки,что приводит к разгрузке К 4. Затем захват взаимодействует с дни- ш,ем 5 К 4 и проворачивает К 4 вокруг оси ролика 7. 12 ил. (Л со сд 01 05 01 фиг. 
13
фиг. 6
15
Ф//е. 7
I
17
18
фиг. В
П
Т)
12
75
фиг.З
фиг. 10
ч
фие. 12
| Рабочий орган роторного экскаватора | 1982 |
|
SU1033643A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ РОТОРНОГО ЭКСКАВАТОРА | 0 |
|
SU283911A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
