Такое исполнение шарнира манипулятора позволяет ориентировать ось последующего звена относительно предыдущего в пределах некоторого конического объема, Благодаря связи предыдущего и последующего звена через стержни и соединение, имеющее сферический элемент и цилиндрическое отверстие, предыдущее и последующее звено совершают симметричные движения относительно промежуточного звена, что обеспечивает увеличение (удвоение) угла поворота последующего звена относительно предыдущего. Кроме того, использование такого шарнира позволяет создавать манипуляторы с согласованным движением звеньев в вертикальной и горизонтальной плоскостях, что открывает новые возможности при проектировании, например схватов манипуляторов.
На чертеже представлена схема предлагаемого устройства.
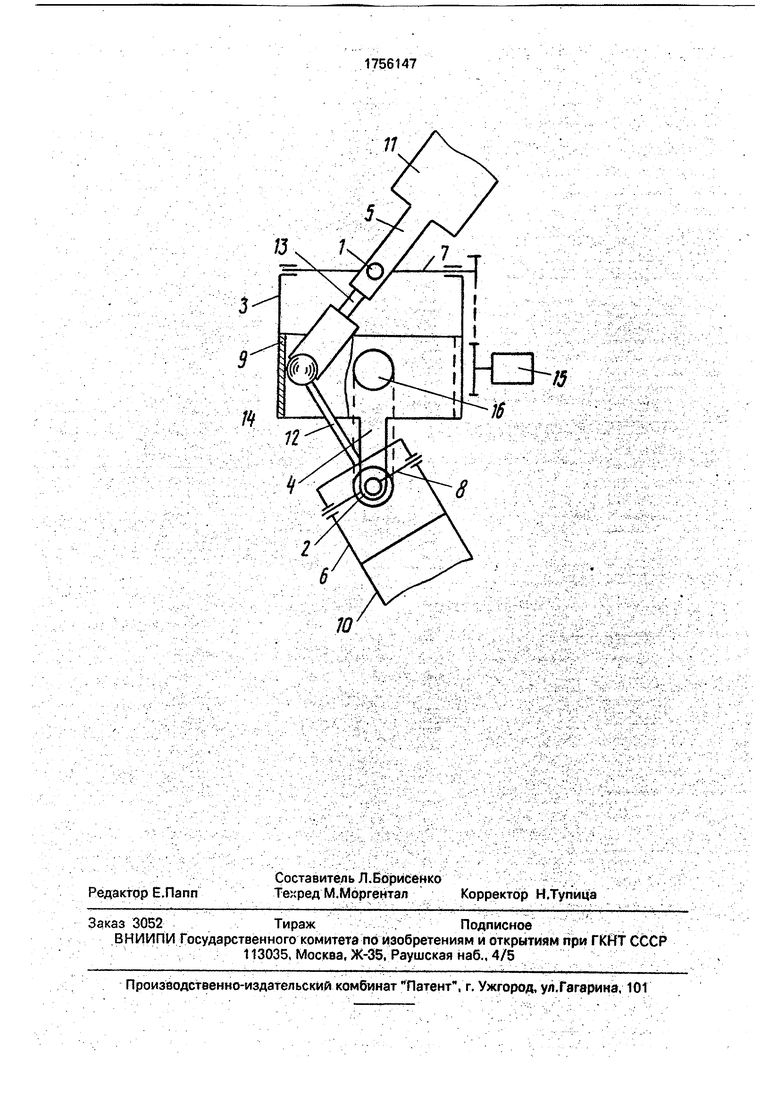
Оно содержит два универсальных шарнира Гука 1 и 2, включающих входные вилки 3 и 4. выходные вилки 5 и 6. крестовины 7 и 8. Входные вилки присоединены к промежуточному звену 9, а выходные вилки - к предыдущему звену 10 и последующему звену 11. С другой стороны входные вилки снабжены стержнями 12 и 13, на конце стержня 12 имеется сферический элемент, на конце стержня 13 - элемент с цилиндрическим отверстием, эти элементы образуют соединение 14 по подвижной посадке. Крестовины 7 и 8 кинематически связаны с приводами 15 и 16, установленными на промежуточном звене. Входные вилки расположены по отношению друг к другу крестообразно.
Устройство работает следующим образом. При включении привода 1 б происходит поворот крестовины 8 относительно предыдущего звена, вследствие чего предыдущее звено 10 поворачивается в плоскости чертежа и, воздействуя стержнем 12 через соединение 14 на стержень 13, поворачивает последующее звено 11. При включении привода 15 происходит аналогичное движение, но только в плоскости, перпендикулярной к плоскости чертежа. При одновременном включении приводов 15 и
16 происходит сложение движений, поскольку это дифференциальный механизм. Результирующее движение звеньев 11 и 10 представляет пространственное перемещение в пределах рабочих зон в виде конусов
с центрами в центрах шарниров Гука,
Технико-экономическое преимущество данного изобретения состоит в увеличении рабочей зоны манипулятора, повышении его эксплуатационных характеристик, снижении стоимости.
Формула изобретения Шарнир манипулятора, содержащий предыдущее м последующее звенья, связанные посредством промежуточного звена и двух универсальных шарниров Гука, имеющих входные вилки, выходные вилки и крестовины с приводами, установленными на промежуточном звене, отличающийся
тем, что, с целью расширения технических возможностей за счет увеличения углов поворота звеньев одно относительно другого, входные вилки присоединены к промежуточному звену и расположены по отношению одна к другой крестообразно, а выходные вилки связаны соответственно с предыдущим и последующим звеньями и дополнительно снабжены стержнями, кинематически связанными между собой соединением, имеющим сферический элемент и цилиндрическое отверстие.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУФТА РАВНЫХ УГЛОВЫХ СКОРОСТЕЙ И РЕГУЛИРУЮЩАЯ СИСТЕМА ДЛЯ НЕЕ | 2002 |
|
RU2292494C2 |
| Манипулятор | 1986 |
|
SU1411131A1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| Шарнир манипулятора | 1990 |
|
SU1782722A1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОГО МАНИПУЛИРОВАНИЯ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2801187C1 |
| ПЯТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ПРИВОДНОЙ ИЗБЫТОЧНОСТЬЮ | 2023 |
|
RU2817276C1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2020 |
|
RU2749819C1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403144C2 |
| РАМА ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 2006 |
|
RU2325792C1 |
| Шарнир манипулятора | 1988 |
|
SU1502300A1 |