X
3J
п
(Л
с
10
f5
ДО
Изобретение относится к машино- Строению, в частности к промышленным. |)Оботам.
Целью изобретения является расширение технологических возможностей 11утем точного воспроизведения про- it-paMMbi перемещений траверс.
На чертеже изображен предлагаемый манипулятор.
Манипулятор состоит из двух моду- 4ей, Первый модуль содержит входную j и выходную 2 траверсы, второй модуль, содержит входную 2 и выходную 2 траверсЫо Траверсы первого модуля связаны между собой посредством параллельных несущих стержней 4-6 рав- длины, снабженных на концах шар- кирами Гука, Траверсы второго модуля связаны аналогичны№1 стержнями . На входной траверсе шарнирно установлены приводной вал 10 и дополни-. .т|ёльньй вал 11, Т1есу цие жестко закре- .4пенные крестовины верхних шарниров и кинематически связанные межчУ - с(обой коническими шестернями 12 и I3,i 1|риводной вал tOj, шестерня 13 снаб-,- эены коромыслами 14 и 15, взаиморей- ствующим : с кулачками 16 и 17, закре- Пленныг-ш на распределительном валу 18., снабженном приводом 19 „ Вилки нижних шарниров Гука жестко закреплены на выходной траверсе 2. Аналогичным образом устроен второй модуль. Иестерня 20 и приводной вал 23 нижне- го:модуля снабжены кривошипами 22 и 23,.которые посредством шатунов 24 и
25со сферическиг-и шаргшрами ка концах взаймедействуют с кривошипам
26и. 27, шарннрно установленными на приводном валу 10 и снабженными коро 1 1слами 28 и 29 взаимодействующими
d кулачками.30 и 31, жестко закреп- JTJeHHbiMH на распределительном валу |8. Дгш1ш кривошипов 26. и 27 равны , / д|пинам KpHBoitninoB 22 и 23, а длины шатунов 24 и 25 равны длинйм несущих с1тержней 4-6,
Манипулятор работает следующим образом.
При включении прив распределительный вал 17, 16, 30 и 31 движ коромыслам 14, 15, 2 ветствии с программой профилем кулачков. От лучают движение кинем ные с ними несущие с зультате чего выходна осуществляет предпис движения. При этом тр мещаются поступательн параллельными одной п
Формула изо
Магшпулятор, содер распределительный вал ,ходные траверсы обра кинематически связанн И стержни равной длин концах шарнирам1Г Гук ющийся тем, чт ширенля технологическ путем точного воспрои перемещений травер расположе шыми на вхо дополнительными ннм из которых жестко вина шарнира- Гука вер кого стержня и конич образу1ощая:( зацеплени ной конической шестер установленной на дру ном валу, с которьм ж крестовины шарниров цов остальных стерж1 кинематически, связан Q libiM валом, а вилки т
30
35
Гука жестко закреплен траверсе, при- этом с }залы траверс сме;кных щие свободно расподож t: кие колеса параллель го модуля связан с ва полнительно. введенны граммным механизмом, звена которого им ную длине указанных
едактор ,Г. Гербер
50
Составитель С, Новик
Техред А.Кравчук Корректор В, Гирняк
При включении привода 19 через распределительный вал 18 с кулачками 17, 16, 30 и 31 движение передается коромыслам 14, 15, 28.и 29 в соответствии с программой, определенной профилем кулачков. От коромысел получают движение кинематически связанные с ними несущие стержни 4-9, в результате чего выходная траверса 3 осу- осуществляет предписанные программой движения. При этом траверсы 1-3 перемещаются поступательно, оставаясь параллельными одной плоскости.
Формула изобретения
Магшпулятор, содержащий приводной распределительный вал, входные и вы- ,ходные траверсы образующие модули и кинематически связанные между собой, И стержни равной длины, снабженные. -на концах шарнирам1Г Гука, . отличающийся тем, что, с целью рас- ширенля технологических возможностей путем точного воспроизведения програм- перемещений траверс, он сн абжен расположе шыми на входной траверсе дополнительными валами, с од- ннм из которых жестко связаны крестовина шарнира- Гука верхнего конца од- . кого стержня и коническая шестерня, образу1ощая:( зацепление с .дополнитель--. ной конической шестерней, свободно установленной на другом дополнительном валу, с которьм жестко связаны крестовины шарниров Гука верхних кон- цов остальных стерж1ей, и этот вал кинематически, связан с распределитель- libiM валом, а вилки тгжних шарниров
Гука жестко закреплены на вызсрдной траверсе, при- этом соответств тощие ; }залы траверс сме;кных модулей, несу- щие свободно расподоженные коничес- кие колеса параллельны, а .вал вторО- го модуля связан с валом первого дополнительно. введенным параллело- граммным механизмом, два противолежа- звена которого имеют длину, равную длине указанных стержней.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации захвата манипулятора | 1987 |
|
SU1445958A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2187671C2 |
| Манипулятор | 1986 |
|
SU1371898A1 |
| Шлифовально-полировальныйСТАНОК | 1979 |
|
SU848302A1 |
| ШВЕЙНАЯ МАШИНА ЗИГЗАГ | 2010 |
|
RU2415209C1 |
| Подвеска осевого редуктора | 1985 |
|
SU1351821A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ | 2001 |
|
RU2220888C2 |
| Устройство для обработки стеклоизделий | 1979 |
|
SU887133A1 |
| Стенд для испытания упругих элементов | 1985 |
|
SU1332176A2 |
| Устройство для прессования стеклоизделий | 1986 |
|
SU1636353A1 |
Изобретение относится к машиностроению в частности к промышленным роботам. Цель изобретения - расшире- ни технологических возможностей путем точного воспроизведения программы перемещения TpaSepc. При включении привода 19 через распределительный вал 18 с кулачками 17, 16, 30 и 31 движение передается коромыслам 14, 15, 28 и 29 в соответствии с прог,;:;:; граммой перемещения траверс, определенной профилем кулачков. От коромысел получают движение кинематически связанные с ними несущие стержни 4 - 9, в результате чего выходная траверса 3 осуществляет :Предписанные программой движения. При. этом траверсы 1, 2 и 3 перемещаются-поступатель- но, оставаясь параллельными одной плоскости. 1 кл.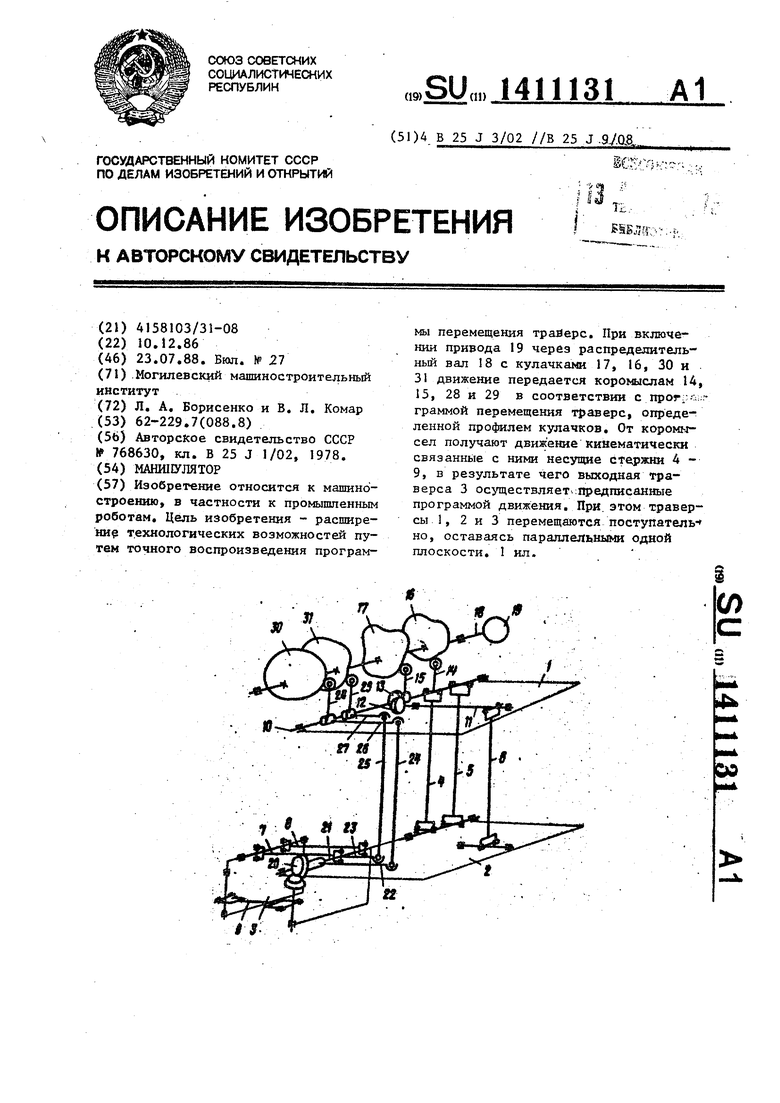
| Манипулятор | 1978 |
|
SU768630A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
