Изобретение относится к механическим подвижным соединительным устройства в виде разных типов PIN-шарниров [Крайнев А.Ф. «Механика машин» (фундаментальный словарь). - М.: Машиностроение, 2000 г., с. 836] для преобразования движения в пространстве одной, параллельных или пересекающихся плоскостях и может найти применение в приводах машин для разных областей машиностроения, например, для передачи вращения от одного двигателя на несколько рабочих органов, или наоборот суммирования движений нескольких регулировочных двигателей на одном выходном звене пространственного платформенного манипулятора с несколькими управляемыми степенями свободы.
Известен шарнир Гука, содержащий подвижное устройство муфты для соединения вращающихся под углом валов в виде плавающей крестовины, образующей вращательное кинематические с ведущим и ведомым валами, которые в пределах общей сборки многозвенной механической системы совершают вращение в одном направлении и с одинаковыми скоростями (Решетов Л.Н. «Конструирование рациональных механизмов». - М.: Изд-во «Машиностроение», 1967, с. 103, схема на рис. 58) - аналог.
Недостатками известного шарнира Гука являются:
1. Ограниченные функциональные и эксплуатационные возможности указанного устройства, позволяющие передать движение только на один рабочий орган и в том же направлении.
2. Сложность подвижных узлов конструкции и их сборки, а также большие габариты механической системы при ее установке, например, в привод электровоза с тремя ведомыми осями (схема такого привода дана в книге: Решетов Л.Н. «Самоустанавливающиеся механизмы» (справочник) - М.: «Машиностроение», 1979, с. 211, рис. 4.38, б).
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является применяемый в передачах для преобразования движения шарнир Кардана, содержащий многократное соединительное устройство поворотных вокруг общей оси звеньев, выполненное в виде двух плавающих крестовин из перпендикулярно закрепленных между собой осей с попарно установленными на концах этих осей вилками для кинематической связи с ведущим, промежуточным и ведомыми валами (Решетов Л.Н. «Конструирование рациональных механизмов». - М.: Машиностроение, 1967, с. 106, схема на рис. 60; авт. Свид. №250974 «Передаточный механизм с шарниром Кардана» - Бюд. Изобр. №27, 1969 г.) - прототип.
Недостатками указанного шарнира Кардана являются:
1. Шарнир Кардана позволяет передавать вращение только между двумя подвижными валами, вращающимися в одном направлении и с одинаковыми угловыми скоростями, что характеризует его ограниченные функциональные и эксплуатационные возможности преобразования движения (как в пределах с несколькими рабочими органами, так и в передачах с несколькими приводными двигателями).
2. Сложность конструкции и большие габариты из-за применения в шарнире плавающих крестовин с большой трудоемкостью их сборки и разборки даже в плоских передачах.
3. Применение шарнира Кардана в многопоточных силовых приводах с передачей движения от нескольких приводных двигателей на один рабочий органа, или наоборот от одного двигателя на несколько независимых рабочих органов, приводит к значительному дополнительному усложнению конструкции и увеличению габаритов и веса всей силовой передачи (так как требует дополнительной установки большого комплекта зубчатых колес).
Например, даже в плоскости силовой передаче мощных электровозов с приводом от одного двигателя всего лишь на две оси (на 2 тяговых колеса) необходимо шарнир Кардана обязательно дополнить комплектом из 6 зубчатых колес со сложным зацеплением между собой (схема такого зубчатого привода с шарниром Кардана представлена в книге: Решетов Л.Н. «Самоустанавливающиеся механизмы» (справочник) - М.: Машиностроение, 1979, с. 210, рис. 4.37, в).
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции шарнира передачи для преобразования движения и снижении за счет этого габаритов и веса механической передачи, а также расширении ее функциональных и эксплуатационных возможностей преобразования движений в плоских и пространственных механических приводах машин без применения сложных зубчатых колес, а также снижении трудоемкости изготовления и сборки подвижных узлов шарнира за счет унификации между собой поворотных рычажных звеньев преобразующих механизмов.
Получение технического результата достигается за счет того, что многократный PIN-шарнир передачи для преобразования движений содержит многократное соединительное устройство поворотных вокруг общей оси звеньев выполнено в виде круговой направляющей с установленным на ней наборов расположенных в одной плоскости радиально изогнутых ползунов, все ползуны раздельно смонтированы вокруг общей оси вращения и кинематически связаны между собой в пределах общей сборки многозвенной механической системы преобразования движений, в каждый из ползунов снабжен вращательной кинематической парой для их кругового поворота относительно общей оси вращения поворотных звеньев многократного соединительного устройства.
В пределах общей сборки многозвенной механической системы преобразований движений, радиально изогнутые ползуны могут быть шарнирно соединены с линейными двигателями, например, в виде поворотных гидроцилиндров, а круговая направляющая сблокирована с рабочим органом для образования 4-х ногого платформенного манипулятора с четырьмя раздельно управляемыми степенями свободы.
В другом варианте общей сборки многозвенной механической системы преобразования движений радиально изогнутые ползуны механизмов для образования пресса с попарно-встречным перемещением ведомых пуансонов, сблокированных с радиально изогнутыми ползунами.
В третьем варианте общей сборки многозвенной механической системы преобразования движений установленные в круговых пазах радиально изогнутые ползуны кинематически шарнирно связаны между собой через сферические шатуны пространственного шарнирно-рычажного механизма с установленными на них рабочими органами для образования пространственного платформенного манипулятора, работающего в пространстве прямоугольной системы координат.
В четвертом варианте общей сборки многозвенной механической системы преобразования движений установленные в разных концентрических пазах радиально изогнутые ползуны кинематически связаны между собой через шатуны шарнирно-рычажного механизма для образования привода, преобразующего вращение одного ведущего звена в движении четырех ведомых звеньев (которые могут быть сблокированы с упомянутыми ползунами или шатунами).
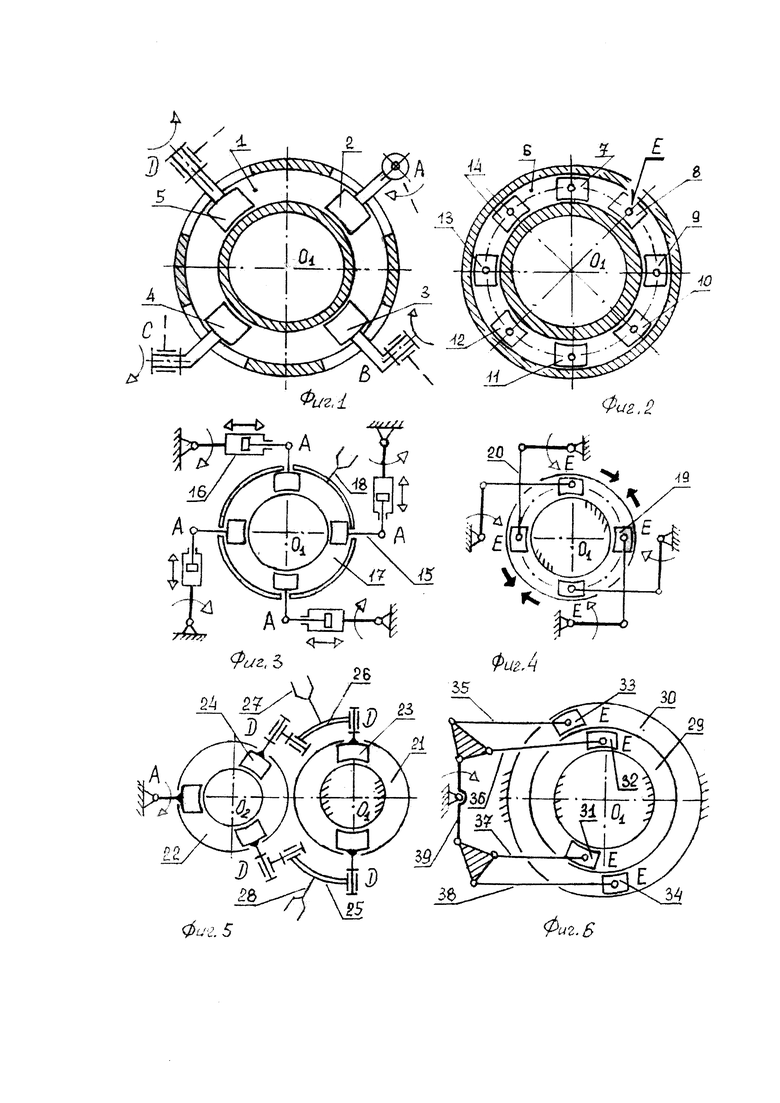
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5 и фиг. 6.
На фиг. 1 представлено устройство 4-кратного PIN-шарнира передачи, в котором многократное соединительное устройство выполнено в виде круговой направляющей 2 с установленным на ней набором расположенных в одной плоскости радиально изогнутых ползунов 2, 3, 4 и 5; все ползуны раздельно смонтированы вокруг общей оси вращения O1 и кинематически связаны между собой в пределах общей сборки многозвенной механической системы преобразования движений, а каждый из ползунов 2, 3, 4 и 5 снабжен вращательной кинематической парой для их кругового поворота относительно общей оси вращения O1 поворотных звеньев многократного соединительного устройства. При этом круговая направляющая выполнена в виде кругового паза, радиально изогнутые ползуны установлены на общей окружности внутри кругового паза и выполнены со смещенным отверстием вращательной кинематической пары (А, В, С, D), расположенным за пределами кругового паза 1 перпендикулярно общей оси O1 вращения ползунов 2, 3, 4, 5.
На фиг. 2 представлен вариант выполнения 8-кратного PIN-шарнира передачи, в котором круговая направляющая выполнена в виде кругового паза 6, а радиально изогнутые ползуны 7, 8, 9, 10, 11, 12, 13 и 14 выполнены с отверстием вращательной кинематической пары Е, расположенным по центру каждого ползуна.
На фиг. 3 представлена кинематическая схема собираемой на основе четырехкратного PIN-шарнира (вокруг оси О1) механической системы преобразования движений, в которой радиально изогнутые ползуны 15 шарнирно соединены с линейными двигателями, например, в виде поворотных гидроцилиндров 16, а круговая направляющая 17 сблокирована с рабочим органом 18 для образования 4-ногого платформенного манипулятора с 8-ю раздельно управляемыми степенями свободы (которые на фиг. 3 указаны стрелками).
На фиг. 4 представлена кинематическая схема собираемой на основе четырехкратного PIN-шарнира (вокруг оси О1) механической системы преобразования движений, в которой радиально изогнутые ползуны 19 шарнирно соединены с шатунами 20 приводных кривошипно-ползунных механизмов для образования пресса с попарно встречным перемещением ведомых пуансонов (сблокированных с ползунами 19).
На фиг. 5 представлена кинематическая схема собираемой на основе двухкратного PIN-шарнира (вокруг оси О1) и трехкратного PIN-шарнира (вокруг оси O2) механической системы преобразования движений, в которой установленные в круговых пазах 21 и 22 радиально изогнутые ползуны 23 и 24 кинематически шарнирно связаны между собой через сферические шатуны 25 и 26 с установленными на них рабочими органами 27 и 28 для образования пространственного платформенного манипулятора.
На фиг. 6 представлена кинематическая схема собираемой на основе четырехкратного PIN-шарнира (вокруг оси O1) механической системы преобразования движений, в которой установленные в разных концентрических круговых пазах 29 и 30 радиально изогнутые ползуны 31, 32, 33 и 34 кинематически связаны между собой через шатуны 35, 36, 37 и 38 шарнирно-рычажного механизма для образования привода, преобразующего вращение ведущего звена 39 в движении с разными скоростями четырех ведомых звеньев (которые могут быть сблокированы с упомянутыми ползунами или шатунами).
Достигаемый в предлагаемом многократном PIN-шарнире положительный эффект заключается в следующем:
1. Упрощается конструкция шарнира соединительного устройства и уменьшаются его габариты за счет компактного размещения в круговой направляющей в одной плоскости всего набора радиально изогнутых ползунов и выполнения одинаковыми всего множества поворотных звеньев в передаче преобразования движения.
2. Снижаются потери на трение и повышается надежность работы шарнира за счет применения всех вращательных кинематических пар для передачи больших усилий от нескольких двигателей на разные рабочие органы.
3. Расширяются эксплуатационные и функциональные возможности применения шарнира как в плоскости, так и в пространственных передачах.
4. В отличие от известных шарниров Гука и Кардана конструкция PIN-шарнира позволяет соединять и передавать движение на три и более поворотных рычажных звеньев в механических системах преобразования движения и применить его в пространственных платформенных манипуляторов с независимым приводом ведомой платформы от нескольких регулировочных двигателей и без применения комплекта сложных зубчатых колес с разным числом зубьев, что приводит к упрощению конструкции всей передачи преобразования движения и снижению ее общих габаритов и веса.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2013 |
|
RU2543135C2 |
| МНОГОКРАТНЫЙ ЦИЛИНДРИЧЕСКИЙ ШАРНИР | 2021 |
|
RU2760497C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ | 2023 |
|
RU2810882C1 |
| СТЕРЖНЕВАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2021 |
|
RU2760496C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| МНОГОПОРШНЕВОЙ РЫЧАЖНЫЙ МЕХАНИЗМ | 2020 |
|
RU2751012C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| ПАУТИННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2024 |
|
RU2830218C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
Изобретение относится к механически подвижным соединительным устройствам для преобразования движения в пространстве одной, параллельных или пересекающихся плоскостях и может найти применение в приводах машин для разных областей машиностроения для передачи вращения от одного двигателя к нескольким рабочим органам без применения зубчатых колес, или наоборот для суммирования движений нескольких двигателей на одном выходном звене пространственного платформенного манипулятора. Многократный шарнир передачи содержит многократное соединительное устройство поворотных вокруг общей оси звеньев, выполненное в виде круговой направляющей с набором радиально изогнутых ползунов, снабженных вращательной кинематической парой и кинематически связанных между собой в пределах общей сборки многозвенной механической системы преобразования движений. Достигается упрощение конструкции, расширяются эксплуатационные и функциональные возможности применения многопоточных передач при снижении их общих габаритов и веса. 8 з.п. ф-лы, 6 ил.
1. Многократный шарнир передачи, содержащий многократное соединительное устройство поворотных вокруг общей оси звеньев, отличающийся тем, что многократное соединительное устройство выполнено в виде круговой направляющей с установленным на ней набором расположенных в одной плоскости радиально изогнутых ползунов, все ползуны раздельно смонтированы вокруг общей оси вращения и кинематически связаны между собой в пределах общей сборки многозвенной механической системы преобразования движений, каждый из упомянутых ползунов снабжен вращательной кинематической парой для их кругового поворота относительно общей оси вращения присоединяемых поворотных звеньев многократного соединительного устройства.
2. Многократный шарнир передачи по п. 1, отличающийся тем, что круговая направляющая выполнена в виде кругового паза, а радиально изогнутые ползуны установлены на общей окружности внутри кругового паза и выполнены с отверстием вращательной кинематической пары, расположенным за пределами кругового паза перпендикулярно общей оси вращения изогнутых ползунов.
3. Многократный шарнир передачи по п. 1, отличающийся тем, что круговая направляющая выполнена в виде кругового паза, а радиально изогнутые ползуны выполнены с отверстием вращательной кинематической пары, расположенным по центру каждого ползуна.
4. Многократный шарнир передачи по п. 1, отличающийся тем, что круговая направляющая выполнена в виде набора смежных концентрических круговых пазов, расположенных один внутри другого с параллельной установкой в каждом из них радиально изогнутых ползунов.
5. Многократный шарнир передачи по п. 2, отличающийся тем, что установленные внутри кругового паза радиально изогнутые ползуны выполнены составными, а каждый ползун составлен из набора круглых роликов, шарнирно соединенных между собой и с приводной рычажной передачей.
6. Многократный шарнир передачи по п. 2, отличающийся тем, что в пределах общей сборки многозвенной механической системы преобразования движений радиально изогнутые ползуны шарнирно соединены с линейными двигателями, например, в виде поворотных гидроцилиндров, а круговая направляющая сблокирована с рабочим органом для образования многоногого платформенного манипулятора с раздельно управляемыми степенями свободы.
7. Многократный шарнир передачи по п. 2, отличающийся тем, что в пределах общей сборки многозвенной механической системы преобразования движений установленные в круговых пазах радиально изогнутые ползуны кинематически шарнирно связаны между собой через сферические шатуны с установленными на них рабочими органами для образования пространственного платформенного манипулятора.
8. Многократный шарнир передачи по п. 3, отличающийся тем, что в пределах общей сборки многозвенной механической системы преобразования движений радиально изогнутые ползуны шарнирно соединены с шатунами приводных кривошипно-ползунных механизмов для образования пресса с попарно-встречным перемещением ведомых пуансонов, сблокированных с радиально изогнутыми ползунами.
9. Многократный шарнир передачи по п. 4, отличающийся тем, что в пределах общей сборки многозвенной механической системы преобразования движений установленные в разных концентрических круговых пазах радиально изогнутые ползуны кинематически связаны между собой через шатуны шарнирно-рычажного механизма для образования привода, преобразующего вращение ведущего звена в движение четырех ведомых звеньев, которые могут быть сблокированы с упомянутыми ползунами или шатунами.
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2013 |
|
RU2543135C2 |
| Способ формовки алюминиевой фольги для электролитических конденсаторов | 1958 |
|
SU121324A1 |
| ПОЛУАВТОМАТ ДЛЯ СБОРКИ КАРДАННОГО ШАРНИРА | 0 |
|
SU283737A1 |
| JP S5783716 A, 25.05.1982. | |||

