Изобретение относится к насосострое- нию и предназначено для использования в оптико-механических запоминающих устройствах с цилиндрическим носителем информации, находящимся в иммерсионной среде.
Цель изобретения - обеспечение реверсивности работы гидронасоса, уменьшение пульсаций потока жидкости и повышение надежности.
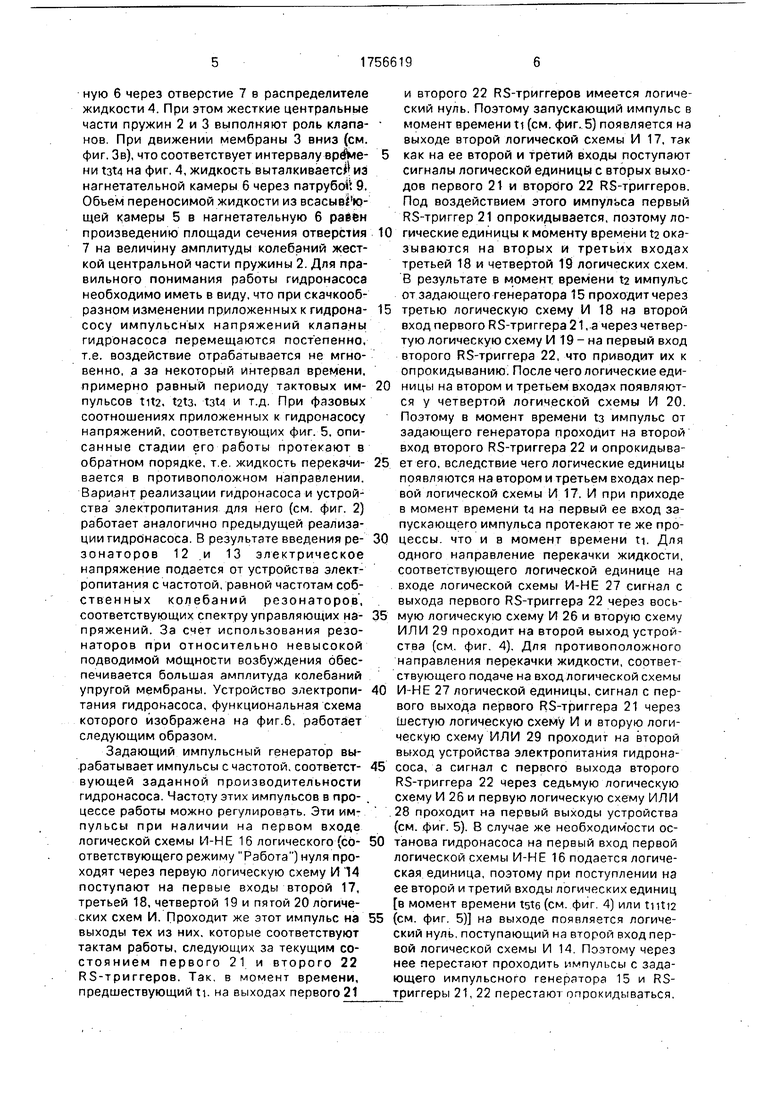
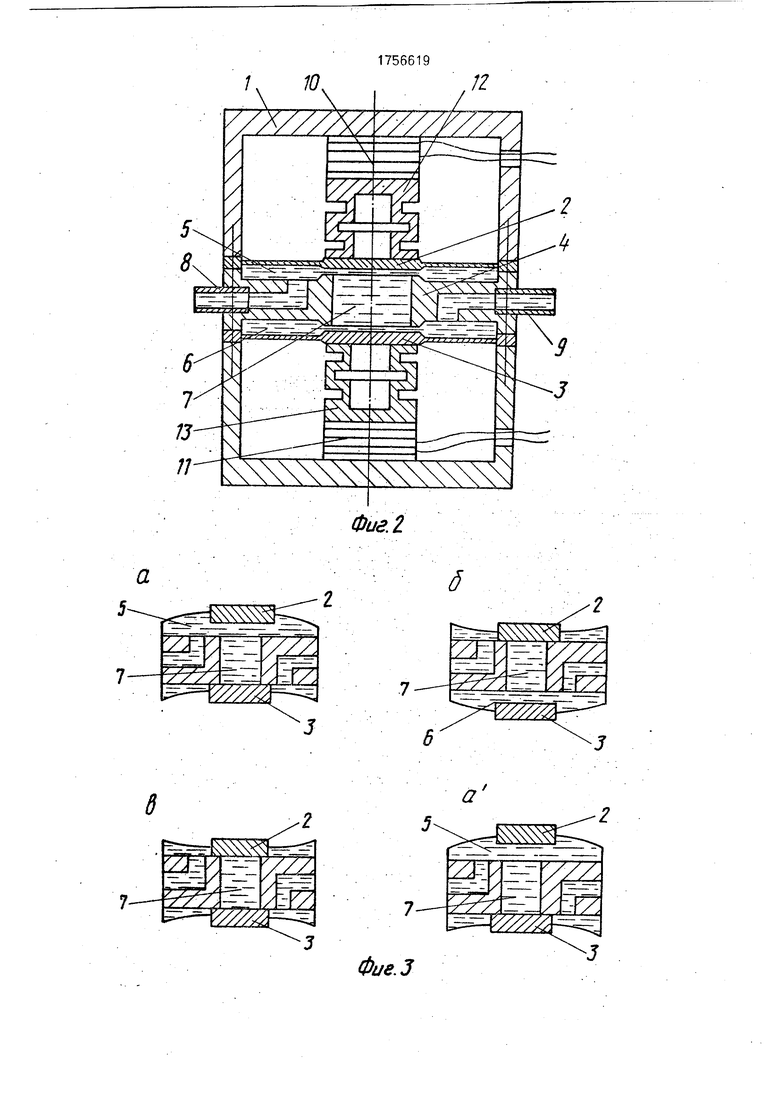
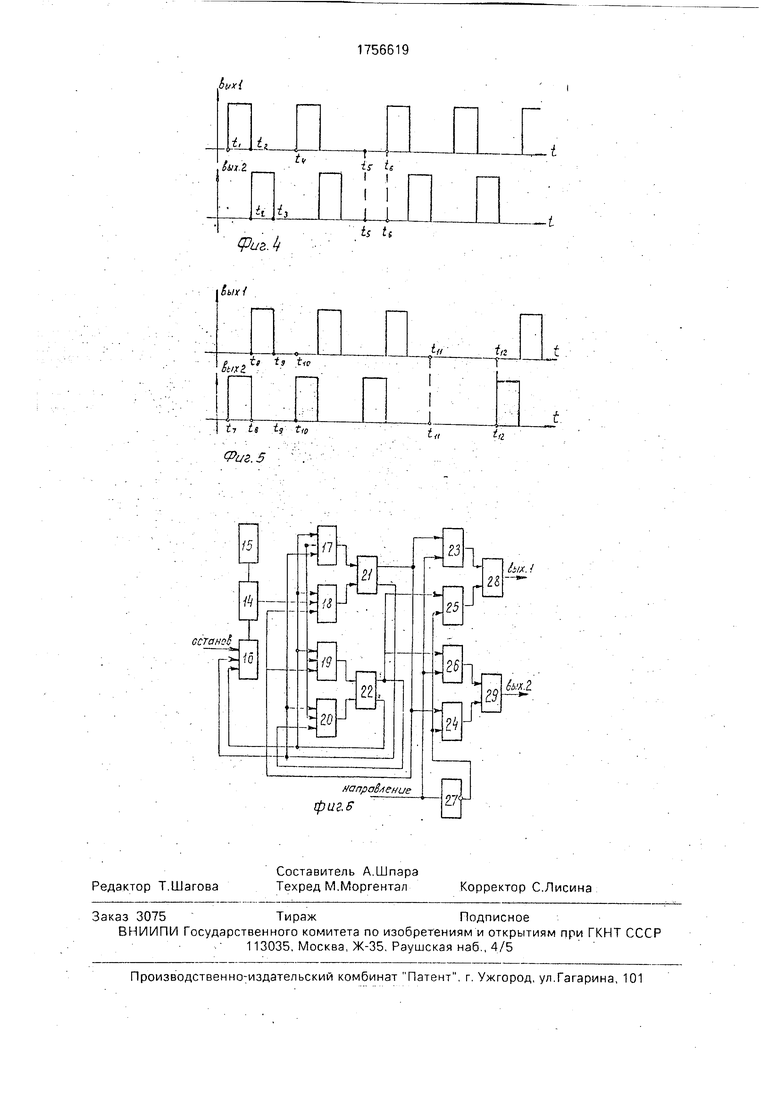
На фиг. 1 изображен вариант реализации гидронасоса с пьезоэлектрическими генераторами деформаций; на фиг. 2 - вариант реализации гидронасоса с пьезоэлектрическими генераторами деформаций и резонаторами; на фиг. 3 - состояния распределительного узла на отдельных этапах работы гидронасоса; на фиг. 4 - эпюры электрических воздействий на генераторы деформаций; на фиг. 5 - эпюры электрических воздействий на генераторы деформаций для противоположного направления движения жидкости; на фиг. 6 - пример реализации функциональной схемы источника электропитания гидронасоса.
Вариант реализации гидронасоса (см. фиг. 1) содержит корпус 1, к которому по периферии прикреплены две упругие мембраны 2 и 3 с жесткими центрами, образующие вместе со стенками корпуса область, делящуюся распределителем потока жидкости 4 на две рабочие камеры 5 и 6 (всасывающую и нагнетательную), сообщающиеся между собой через центральное отверстие 7 в распределителе потока жидкости 4, каждая со своим по меньшей мере одним патрубком 8 и 9 (входным и выходным). Генераторы деформаций 10 и 11 (могут быть реализованы в виде по меньшей мере одного пакета пьезокерамических пластин, магнитоэлектрического или электромагнитного привода возвратно-поступательного движения, или в виде единого конструктивного элемента, например, из биморфных пьезоэлектрических элементов, заделанных в эластичный изоляционный материал) жестко соединены с корпусом 1 и упругими мембранами 2 и 3. Вариант реализации гидронасоса (см. фиг. 2) отличается от предыдущего тем, что в него между каждым генератором деформаций 10,11 и своей упругой мембраной 2, 3 введены жестко с ними связанные резонаторы 12 и 13. Устройство электропитания гидронасоса (см. фиг. 6) содержит первую логическую схему И 14, к двум входам которой подключены задающий генератор импульсов 15 и логическая схема И-НЕ 16, к первому входу которой подключен источник сигнала останова (на чертеже для простоты не показанный). Выход первой логической схемы И 14 подключен к первым входам второй 17 и третьей 18, четвертой 19 и пятой 20 логических схем И, Выходы второй 17 и третьей 18 логических схем И подключены соответственно к первому и второму входам RS-триггера 21. Выходы четвертой 19 и пятой 20 логических схем И подключены соответственно к первому и второму входам второго RS-триггера 22.
0 Первый выход первого RS-триггера 21 подключен к первым входам шестой 23 и седьмой 24 логических схем И, а также - к вторым входам третьей 18 и четвертой 19 логических схем И Второй выход первого
5 RS-триггера 21 подключен к вторым входам второй 17 и пятой 20 логических схем И, а также - к второму входу логической схемы И-НЕ 16. Первый выход второго RS-триггера 22 подключен к первым входам восьмой 25
0 и девятый 26 логических схем И, а также - к третьему входу пятой логической схемы И 20. Второй выход второго RS-триггера 22 подключен к третьим входам второй 17, третьей 18 и четвертой 19 логических схем
5 И, а также - к третьему входу логической схемы И-НЕ 16. К в/горым входам седьмой 24 восьмой 25 логических схем И подключен выход логической схемы ИЛИ-НЕ27, к входу которой подключен источник сигнала на0 правления перекачки жидкости гидронасосом (на чертеже для простоты не показанный), подключенный также к вторым входам шестой 23 и девятой 26 логических схем И. Выходы шестой 23 и восьмой
5 25 логических схем И подключены соответственно к первому и второму входам первой логической схемы ИЛИ 28. Выходы седьмой 24 и девятой 26 логических схем И подключены соответственно к первому и второму
0 входам второй логической схемы ИЛИ 29. Выход первой логической схемы ИЛИ 29 является первым выходом устройства, а выход второй логической схемы ИЛИ 29 - вторым выходом.
5 Предлагаемый гидронасос работает следующим образом.
На генераторы деформаций 10 и 11(см. фиг. 1) подается электрическое напряжение от устройства электропитания (см, фиг. 6) со
0 сдвигом фаз (см, фиг. 4, 5), зависящим от направления прокачки. При этом мембраны 2 и 3 совершают колебательные движения. При движении мембраны 2 вверх (см. фиг. За), что соответствует интервалу времени
5 tita на фиг. 4, жидкость переносится через всасывающий патрубок 8 во всасывающую камеру 5. При движении мембран 2 и 3 вниз (см. фиг. 36), что соответствует интервалу времени t2t3 на фиг. 4, жидкость переносится из всасывающей камеры 5 в нагнетательную б через отверстие 7 в распределителе жидкости 4. При этом жесткие центральные части пружин 2 и 3 выполняют роль клала- нов При движении мембраны 3 вниз (см. фиг. Зв), что соответствует интервалу ни t3t4 на фиг, 4, жидкость выталкиваете из нагнетательной камеры 6 через патрубок 9. Объем переносимой жидкости из всасывГю- щей камеры 5 в нагнетательную 6 равен произведению площади сечения отверстия 7 на величину амплитуды колебаний жесткой центральной части пружины 2. Для правильного понимания работы гидронасоса необходимо иметь в виду, что при скачкообразном изменении приложенных к гидрона- сосу импульсных напряжений клапаны гидронасоса перемещаются постепенно, т.е. воздействие отрабатывается не мгновенно, а за некоторый интервал времени, примерно равный периоду тактовых им- пульсов tit2, t2t3, t3t4 и т.д. При фазовых соотношениях приложенных к гидронасосу напряжений, соответствующих фиг. 5, описанные стадии его работы протекают в обратном порядке, т е жидкость перекзчи- вается в противоположном направлении. Вариант реализации гидронасоса и устройства электропитания для него (см. фиг. 2) работает аналогично предыдущей реализации гидронасоса. В результате введения ре- зонаторов 12 и 13 электрическое напряжение подается от устройства электропитания с частотой, равной частотам соб- ственных колебаний резонаторов, соответствующих спектру управляющих на- пряжений. За счет использования резонаторов при относительно невысокой подводимой мощности возбуждения обеспечивается большая амплитуда колебаний упругой мембраны. Устройство электропи- тания гидронасоса, функциональная схема которого изображена на фиг.6, работает следующим образом.
Задающий импульсный генератор вырабатывает импульсы с частотой, соответст- вующей заданной производительности гидронасоса. Частоту этих импульсов в процессе работы можно регулировать. Эти импульсы при наличии на первом входе логической схемы И-НЕ 16 логического (со- ответствующего режиму Работа) нуля проходят через первую логическую схему И 14 поступают на первые входы второй 17, третьей 18, четвертой 19 и пятой 20 логических схем И. Проходит же этот импульс на выходы тех из них. которые соответствуют тактам работы, следующих за текущим состоянием первого 21 и второго 22 RS-триггеров. Так., в момент времени, предшествующий ti. на выходах первого 21
и второго 22 RS-триггеров имеется логический нуль. Поэтому запускающий импульс в момент времени ti (см. фиг. 5) появляется на выходе второй логической схемы И 17, так как на ее второй и третий входы поступают сигналы логической единицы с вторых выходов первого 21 и второго 22 RS-триггеров. Под воздействием этого импульса первый RS-триггер 21 опрокидывается, поэтому логические единицы к моменту времени ta оказываются на вторых и третьих входах третьей 18 и четвертой 19 логических схем В результате в момент времени ta импулъс от задающего генератора 15 проходит через третью логическую схему И 18 на второй вход первого RS-триггера 21, а через четвертую логическую схему И 19 - на первый вход второго RS-триггера 22, что приводит их к опрокидыванию. После чего логические единицы на втором и третьем входах появляются у четвертой логической схемы И 20. Поэтому в момент времени t3 импульс от задающего генератора проходит на второй вход второго RS-триггера 22 и опрокидывает его, вследствие чего логические единицы появляются на втором и третьем входах первой логической схемы И 17. И при приходе в момент времени т.4 на первый ее вход запускающего импульса протекают те же процессы что и в момент времени ti. Для одного направление перекачки жидкости, соответствующего логической единице на входе логической схемы И-НЕ 27 сигнал с выхода первого RS-триггера 22 через восьмую логическую схему И 26 и вторую схему ИЛИ 29 проходит на второй выход устройства (см. фиг. 4). Для противоположного направления перекачки жидкости, соответствующего подаче на вход логической схемы И-НЕ 27 логической единицы, сигнал с первого выхода первого RS-триггера 21 через Шестую логическую схему И и вторую логическую схему ИЛИ 29 проходит на второй выход устройства электропитания гидронасоса, а сигнал с первого выхода второго RS-триггера 22 через седьмую логическую схему И 26 и первую логическую схему ИЛИ 28 проходит на первый выходы устройства (см. фиг. 5). В случае же необходимости останова гидронасоса на первый вход первой логической схемы И-НЕ 16 подается логическая единица, поэтому при поступлении на ее второй и третий входы логических единиц в момент времени tste (см. фиг 4) или tnti2 (см. фиг. 5) на выходе появляется логический нуль, поступающий на второй вход первой логической схемы И 14 Поэтому через нее перестают проходить импульсы с задающего импульсного генератора 15 и RS- триггеры 21, 22 перестают опрокидываться.
Формула изобретения
1.Гидронасос, содержащий корпус, закрепленный в корпусе генератор деформаций, упругую мембрану, жестко связанную с генератором деформаций в центре и закрепленную по периферии в корпусе с обра- зованием рабочей камеры, в стенке которой, расположенной против мембраны, выполнены каналы коммутации внешних магистралей перекачиваемой среды, и устройство электропитания генератора деформации, отличающийся тем, что, с целью расширения функциональных возможностей, обеспечения реверсивности работы, уменьшения пульсации потока перекачиваемой среды и повышения надежности, насос дополнительно снабжен вторым генератором деформации и второй упругой мембраной, расположенной оппозитно первой с образованием второй рабочей камеры, отделенной от первой камеры стенкой корпуса, причем один из каналов коммутации сообщен с одной из внешних магистралей и одной из рабочих камер, другой - с второй внешней магистралью и второй рабочей камерой, по оси мембран в стенке корпуса -выполнен дополнительный сквозной канал коммутации, сообщающий между собой рабочие камеры, а на стенке с двух сторон выполнены оппозитно расположенные с возможностью взаимодействия с центральными частями мембран седла, обхватывающие сквозной канал
2.Гидронасос поп, 1.отличающий- с я тем, что генераторы деформации выполнены в виде магнитоэлектрического привода.
3.Гидронасос поп 1,отличающий- с я тем, что генераторы деформации выполнены в виде электромагнитного привода.
4.Гидронасос по пп 1-3, отличающийся тем, что каждый генератор деформации снабжен установленным между ним и мембраной резонатором.
5.Гидронасос по пп 1-4, о т л и ч а ю - щи и с ятем, что устройство электропитания снабжено логической системой, состоящей из девяти логических элементов И, из которых пять имеют по два входа, а четыре,по три входа, двух RS-триггеров, каждый из которых имеет по два входа и выхода, логического элемента И-НЕ с тремя входами,
логического элемента НЕ, двух логических элементов ИЛИ с двумя входами, задающего импульсного генератора, блока выдачи сигнала останова и блока выдачи сигнала направления перекачки, причем задающий
генератор подключен к одному из входов первого элемента И с двумя входами, второй вход которого подключен к выходу элемента И-НЕ, выход первого элемента И подключен к одному из трех входов каждого
трехвходового элемента И, соответственно, к второму, третьему, четвертому и пятому элементам, выходы второго и третьего элементов И подключены к одному из входое И - к одному из входов второго RS-триггера,
один из выходов первого RS-триггера подключен к одному из входов шестого, одному из входов седьмого элементов И и вторым входам третьего и четвертого элементов И, другой ЕЫХОД первого RS-триггера подключен к вторым входам второго и пятого элементов И и одному из входов элемента И-НЕ, один из выходов второго RS-триггера подключен к одному из входов восьмого, одному из входов девятого элементов И и
третьему входу пятого элемента И, другой выход второго RS-триггера соединен с третьими входами второго, третьего и четвертого элементов И и вторым входом элемента И-НЕ, третий вход которого
подключен к блоку выдачи сигнала останова, вторые входы шестого и девятого элементов И соединены с входом элемента НЕ, выход которого подключен к вторым входам седьмого и восьмого элементов И, выходы
шестого и восьмого элементов И подключены к входам первого элемента ИЛИ, а выходы седьмого и девятого элементов И связаны с входами второго элемента ИЛИ, при этом выходы первого и второго элементов ИЛИ подключены соответственно к первому и второму генераторам деформации мембран, а вход элемента НЕ связан с блоком выдачи сигнала направления перекачки.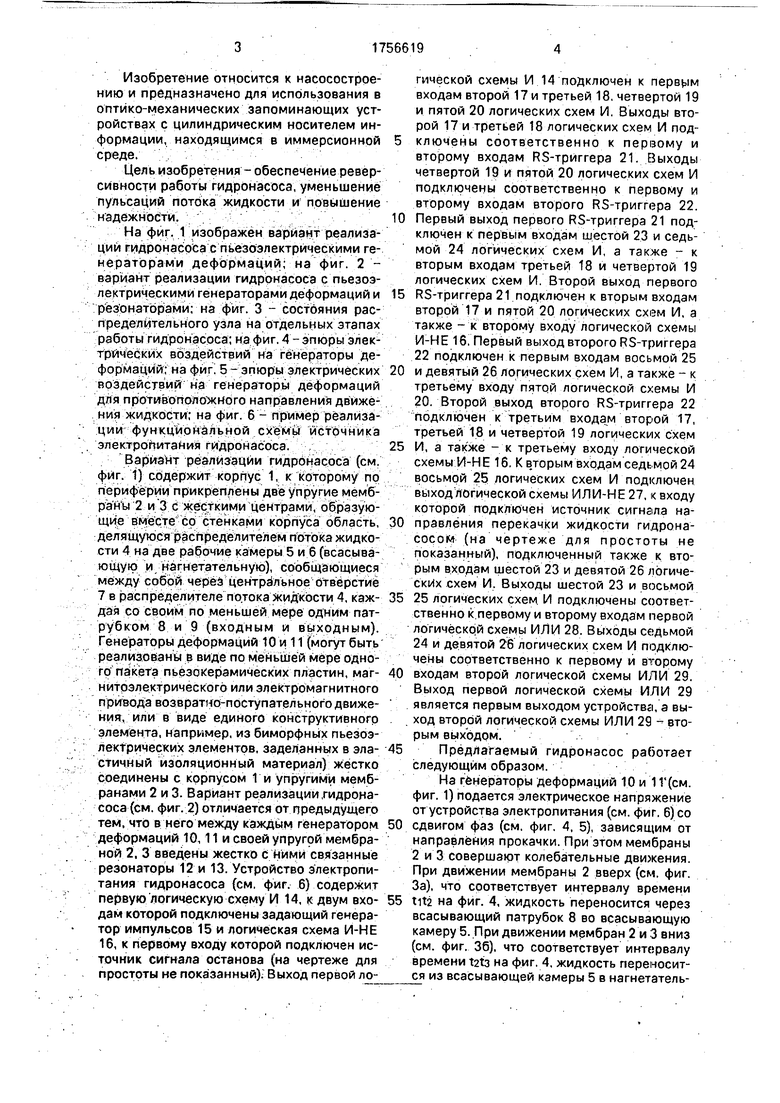
| название | год | авторы | номер документа |
|---|---|---|---|
| Система бесперебойного питания | 1990 |
|
SU1807546A1 |
| Источник вторичного электропитания для сети постоянного напряжения | 1990 |
|
SU1786476A1 |
| ИМПУЛЬСНЫЙ СТАБИЛИЗАТОР ПОСТОЯННОГО НАПРЯЖЕНИЯ ПОНИЖАЮЩЕГО ТИПА | 1991 |
|
RU2006062C1 |
| Устройство для контроля и диагностики цифровых устройств | 1988 |
|
SU1583886A2 |
| Устройство для контроля и диагностики цифровых устройств | 1986 |
|
SU1499286A1 |
| Устройство для контроля и диагностики цифровых устройств | 1987 |
|
SU1583914A2 |
| Преобразователь временных интервалов в код | 1977 |
|
SU687590A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Система управления импульсного водомета | 1990 |
|
SU1760120A1 |
| ТРЕХФАЗНЫЙ БЕСТРАНСФОРМАТОРНЫЙ НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 2020 |
|
RU2758443C1 |
Использование: в насосостроении, в оптико-механических запоминающих устройствах с цилиндрическим носителем информации, находящимся в иммерсионной среде. Сущность изобретения: насос содержит корпус (1), мембраны (2) и (3), распределитель потока (4), две рабочие камеры 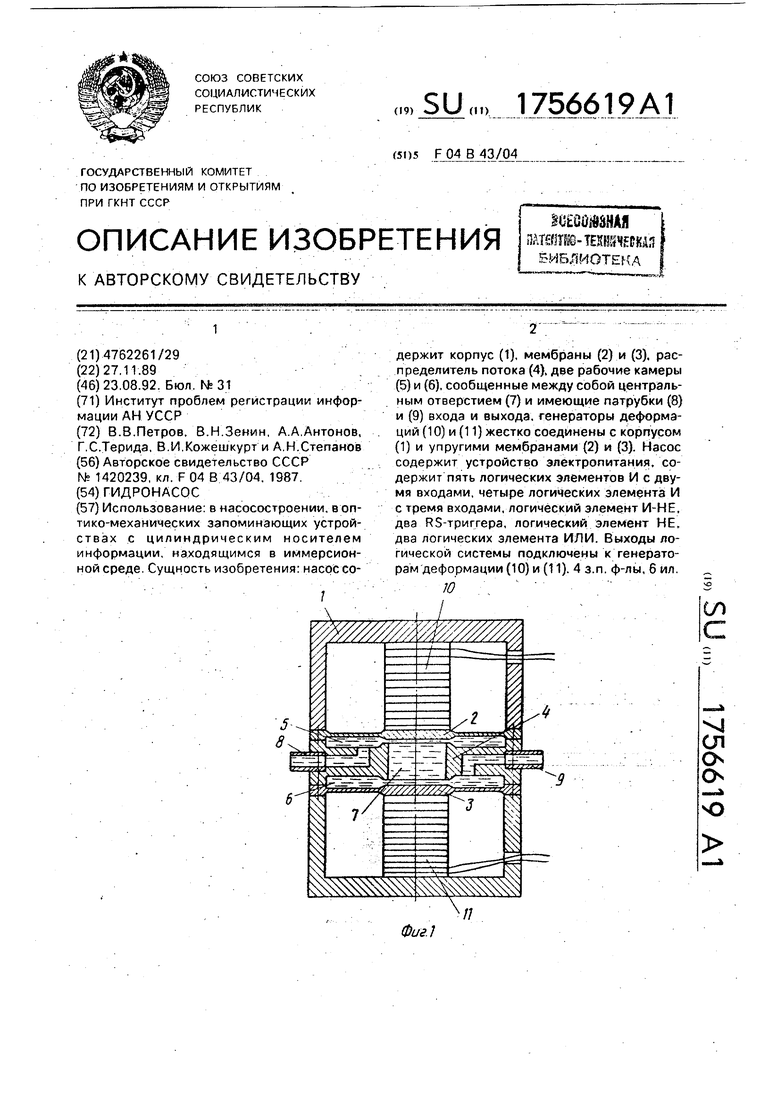
а
С
Фиг. 2
6
А-
/2ZZ
ГУ,
х
1Ш
Фие.З
U Фиг 5
15
ti
15
Л
{9
го
I) и
ъ
LT
t,
in
гз
25
гб
tt
Ъ Л
Ъ /
II
1м 1
Ј9
db Xl
| Пьезогидравлический насос | 1987 |
|
SU1420239A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
