Изобретение относится к устройствам, предназначенным для определения газодинамических моментов, возникающих в газостатических подвесах чувствительных элементов гироскопических приборов, а также в приборостроительной промышленности, где используются газостатические опоры и является усовершенствованием изобретения по авт.св. № 1525491.
Целью изобретения является повышение точности путем учета угловой жесткости, а также уменьшение числа технологических операций и времени замеров.
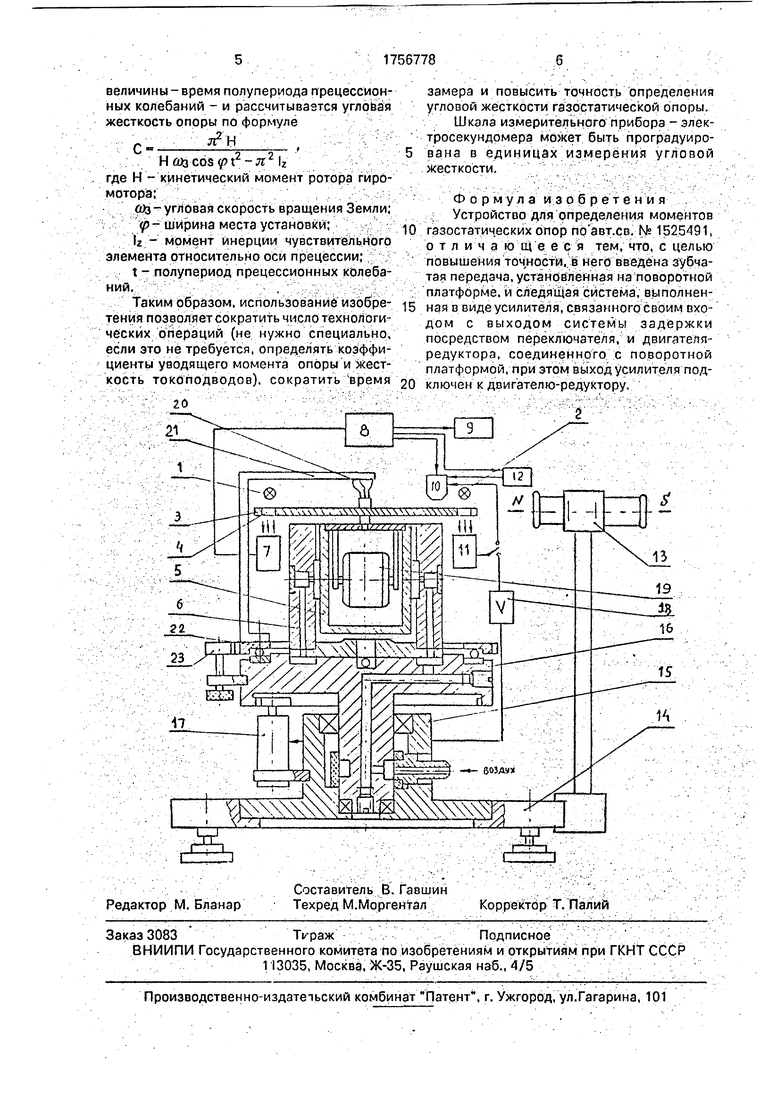
На чертеже изображено предлагаемое устройство.
Устройство содержит источники 1 и 2 светового излучения, дисковый прерыватель 3 светового потока с щелевыми отверстиями 4, соединенный с шипом 5 газостатической опоры 6, фотоэлектрический датчик 7 угловых перемещений, электронную схему 8 управления, измерительный прибор (электросекундомер, шкала которого дополнительно проградуирована в единицах углового ускорения) 9, арретир 10,
предназначенный для фиксации дискового прерывателя светоао о потока, схему 11, задержки арретированием, дополнительную схему 12 задержки арретированием, вход которой связан с электронной схемой управления, оптическое устройство 13, устанавливаемое на неподвижном горизонтальном основании 14, снабженным блоком подшипников 15, поворотную платформу 16, с выполненными в ней газоподво- дящими каналами, устанавливаемую в блок подшипников 15 и служащую для поворота вокруг вертикальной оси с помощью следящей системы, выполненной в виде усилителя 18, связанного своим входом с выходом системы 11 задержки посредством переключателя и двигателя-редуктора 17, соединенного с поворбтной платформой, вход которого подключен к выходу усилителя 18, газостатической опоры 6 с чувствительным элементом, состоящего из соединенных между собой шипаигиромотора 19, питание которого осуществляется упругими токо- подводами 20. механически соединенными с дисковым прерывателем 3 светового потока и размещенными на стойке 21, прикреп
С/)
С
х СЯ О х| х| 00
ГО
ленной к зубчатой передаче 22, приводимой в движение относительно платформы 1 б, соединенной с ней рукояткой 23.
Устройство работает следующим образом.
При определении уводящего момента газостатической опоры 6, обусловленного отклонениями формы шипа и подшипника, а также неточностью выполнения питающих отверстий, токоподводы 20 не присоединяют к дисковому прерывателю светового потока 3. Включают устройство, подавая газ (воздух) в рабочий зазор опоры и подключая питание к электронной схеме 8. Под действием уводящих моментов чувствительный элемент, соединенный с дисковым прерывателем светового потока 3, поворачивается вокруг вертикальной оси и происходит засветка от источников 2 и 1 светового излучения фотоэлектрического датчика 7 угловых перемещений и схемы 11 задержки арретированием, соединенной в этом случае с арретиром 10 с помощью переключателя. Арретир 10 останавливает дисковый прерыватель светового потока 3, устанавливая его в положение электрического нуля датчика угловых перемещений. Далее выполняется установка на нуль измерительного прибора 9.
Процесс измерения углового ускорения начинается с включения электронной схемы 8 управления. При этом включается измерительный прибор 9, а дисковый прерыватель светового потока 3 рэсарретируется и начинает вместе с чувствительным элементом поворачиваться без начальной скорости. На выходе датчика угловых перемещений 7 появляется сигнал, пропорциональный углу поворота дискового прерывателя, и при достижении определенной величины срабатывает электронная схема управления, вызывающая отключение измерительного прибора и появление сигнала в схеме задержки арретирования.
Устройство предусматривает возможность измерения уводящих моментов для различных относительных положений чувствительного элемента в газостатической опоре. Количество замеров определяется количеством отверстий, выполненных на диске. После выполнения замеров определяется среднее значение действукицего на шип в рабочих условиях уводящего момента.
Определение восстанавливающего газодинамического момента опоры в рамках линейной теории сводится к определению ее угловой жесткости.
Процесс определения угловой жесткости заключается в следующем. После определения уводящего момента опоры выход схемы задержки 11 арретирования с помощью переключателя соединяется с входом усилителя 18 и выключается
дополнительная схема 12 задержки арретирования. Устанавливают дисковый прерыватель светового потока 3 только с двумя взаимопротивопйложными а(елевыми отверстиями (1-2) и ориентируют так, чтобы
0 ось их симметрии была параллельна оси вращения гиромотора 19, затем подключают токоподводы 20. Под действием, уводящего момента и момента от закрутки упругих токоподводов чувствительный эле5 мент будет находиться в равновесии. После набора гиромотором номинальных оборотов с помощью рукоятки 23 и зубчатой передачи 22 через стойку 21 и токоподводы 20 приводят чувствительный олеменг в поло0 жение, когда вектор кинетического момента направлен по линии MS (Север-Юг), контролируемое оптическим устройством 13.
При повороте через отверстие 2 засвечивается фотодиод схемы 11 задержки арре5 тирования, которая соединена механически с поворотной платформой 16, и с усилителя 18 подается сигнал па двигатель-редуктор 17, который поворачивает платформу 16 и сохраняет фиксированное положение чувст0 вительного элемента в газостатической опоре. Далее отклоняют чувствительный элемент от плоскости меридиана на 10-15 (двигатель-редуктор поворачивает платформу также на эту величину) и арретируют, с
5 помощью дополнительной схемы 12, дисковый прерыватель светового потока. Включают электронную схему управления и разарретируют дисковый прерыватель светового потока. Под действием направляю0 щего момента чувствительный элемент начнет прецессионное движение по совмещению вектора кинетического момента с плоскостью меридиана. При совмещении щелевого отверстия 1 со световым потоком
5 на выходе датчика угловых перемещений 7 появится сигнал, сработает электронная схема 8 управления, которая включит измерительный прибор 9 и подготовит дополнительную схему 12 задержки арретирования
0 к работе. Через половину периода прецессионных колебаний чувствительного элемента произойдет повторное совмещение щелевого отверстия 1 со световым потоком. В этом случае электронная схема управле5 ния 8 отключит измерительный прибор 9 и вызовет появление сигнала в дополнительной схеме 12 задержки арретирования для остановки чувствительного элемента.
После остановки чувствительного элемента снимаются показания измеряемой
величины - время полупериода прецессионных колебаний - и рассчитывается угловая жесткость опоры по формуле
л2Н
Н УЗ cos р г - п 4 lz
где Н - кинетический момент ротора гиро- мотора;
ufc- угловая скорость вращения Земли; р- ширина места установки;
lz - момент инерции чувствительного элемента относительно оси прецессии;
t- полупериод прецессионных колебаний.
Таким образом, использование изобре- тения позволяет сократить число технологических операций (не нужно специально, если это не требуется, определять коэффициенты уводящего момента опоры и жесткость токоподводов). сократить время
замера и повысить точность определения угловой жесткости газостатической опоры. Шкала измерительного прибора - электросекундомера может быть проградуиро- вана в единицах измерения угловой жесткости.
Формула изобретения Устройство для определения моментов гэзостатических опор по авт.св. № 1525491, отличающееся тем, что, с целью повышения точности, в него введена зубчатая передача, установленная на поворотной платформе, и следящая система, выполненная в виде усилителя, связанного своим входом с выходом системы задержки посредством переключателя, и двигателя- редуктора, соединенного с поворотной платформой, при этом выход усилителя подключен к двигателю-редуктору.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения моментов газостатических опор | 1987 |
|
SU1525491A2 |
| Устройство для определения моментов газостатических опор | 1978 |
|
SU767576A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2131028C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| Устройстводля определения степени загрязненности моторных масел методом ультразвукового интерферометра | 2021 |
|
RU2750566C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
Использование: в точном мэшимо- и приборостроении. Сущность изобретена устройство содержит зубчатую передачу, уг тановленную на поворотной платформе еле дящую систему.ьгШлнТен ГуТЬ в виде усилителя, связанного своим входом с выходом системы задержки посредством переключателя, и двигатель-редуктор, соединенный с поворотной платформой, при этом выход усилителя подключен к двигателю-редуктору. 1 ил.
| Устройство для определения моментов газостатических опор | 1987 |
|
SU1525491A2 |
