3 (Л
го
восстанавливающего газодинамического момента опоры сводится к определению ее угловой жесткости. Подключают к чувствительному элементу токоподводы, отключают схему 11 задержки арретиро- вания и включают дополнительную схе- му 12 задержки арретирова1шя. Определяют положение равновесия чувствительного элемента и выставляют его, пово- ю
4914
рачивая платформу 16 так, что вектор кинетического момента запущенного гиромотора 18 направлен по линии N-S, контролируемой оптическим устройством 13, С помощью измерительного прибора 9 определяю период прецессионных колебаний чувствительного элемен- та и по формуле вычисляют угловую жесткость газостатической опоры, ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения моментов газостатических опор | 1990 |
|
SU1756778A2 |
| Устройство для определения моментов газостатических опор | 1978 |
|
SU767576A1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ОСИ РОТОРА ГИРОМОТОРА В ГИРОКОМПАСЕ ОТНОСИТЕЛЬНО АСТРОНОМИЧЕСКОГО | 1973 |
|
SU361393A1 |
| ИМПУЛЬСНЫЙ ТРЕХСТЕПЕННЫЙ ГИРОСКОПИЧЕСКИЙ ПРИБОР, СПОСОБ ЕГО ЗАПУСКА И СПОСОБ ВЗВЕДЕНИЯ СПИРАЛЬНЫХ ЛЕНТОЧНЫХ ПРУЖИН ИМПУЛЬСНОГО ТРЕХСТЕПЕННОГО ГИРОСКОПА | 2001 |
|
RU2196963C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР (ВАРИАНТЫ) | 1998 |
|
RU2155324C1 |
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП С ШАРОВЫМ ГАЗОДИНАМИЧЕСКИМ ПОДВЕСОМ | 2004 |
|
RU2264596C1 |
| Автоматический наземный гирокомпас | 1979 |
|
SU808847A1 |
Изобретение может быть использовано в точном машино- и приборостроении, где используются газостатические опоры для подвеса чувствительных элементов. Цель изобретения состоит в повышении точности. При определении уводящего момента газостатической опоры 6 отсоединяют токоподводы 19 и отключают дополнительную схему 12 арретирования. Значения уводящего момента замеряют для различных относительных положений чувствительного элемента в опоре, а затем определяют его среднее значения. Определение восстанавливающего газодинамического момента опоры сводится к определению ее угловой жесткости. Подключают к чувствительному элементу токоподводы, отключают схему 11 задержки арретированием и включают дополнительную схему 12 задержки арретированием. Определяют положение равновесия чувствительного элемента и выставляют его, поворачивая платформу 16 так, что вектор кинетического момента запущенного гиромотора 18 направлен по линии N - S, контролируемой оптическим устройством 13. С помощью измерительного прибора 9 определяют период прецессионных колебаний чувствительного элемента и по формуле вычисляют угловую жесткость газостатической опоры. 1 ил.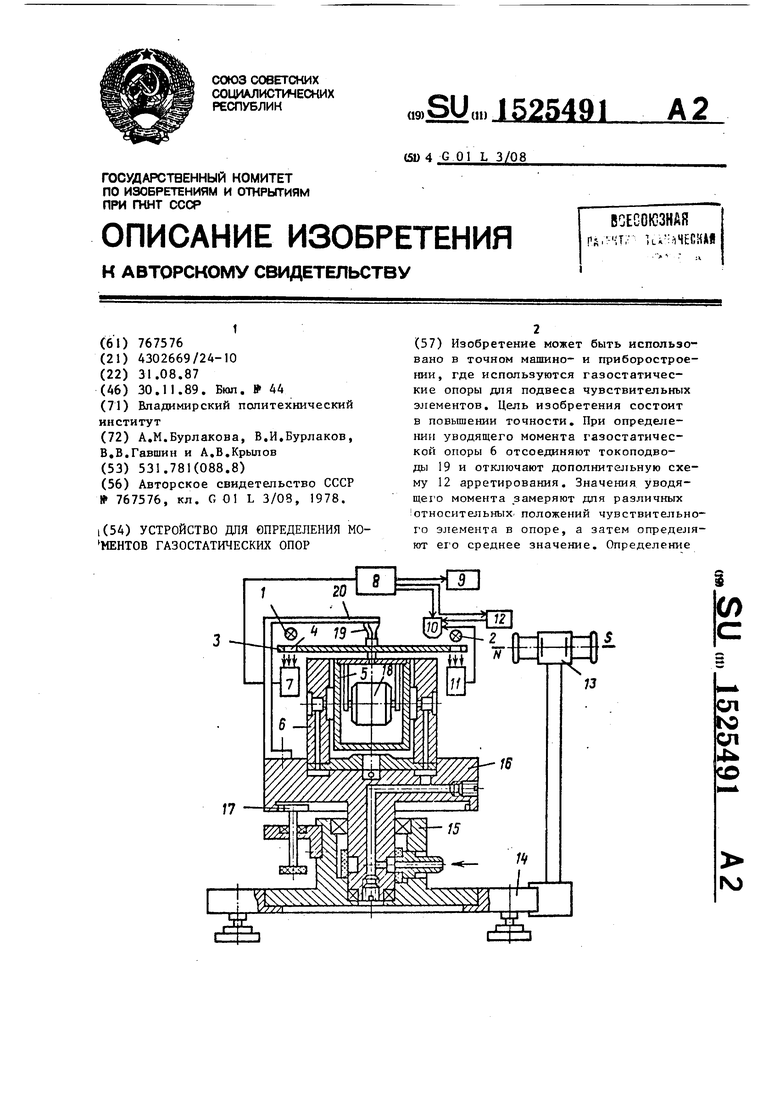
Изобретение относится к устройст- вам, предназначенным дня определения газодинамических моментов ,воз1шкающих в газостатических подвесах чувстви- элементов гироскопических приборов, а также в приборостроительной промышленности, где используются га- зрстатические опоры.
Целью изобретения является повышение точности путем учета угловой жесткости.
На чертеже изображено предлагаемое устройство.
Устройство содержит источники I и 2 светового излучения, дисковый прерыватель 3 светового потока с ще- левыми отверстиями 4, соединенными с шипом 5 газостатической опоры 6, фотоэлектрический датчик 7 угловых перемещений, электронную схему 8 управления, измерительный прибор .(электросекундомер, шкапа которого дополнительно проградуирована в единицах углового ускорения) 9, арретир Ю, предназначенный для фиксации дискового прерывателя светового потока, cxebfy 1 1 задержки арретирования, дополнительную схему 12 задержки арретирования, вход которой связан с электронной схемой управления, оптическое устройство 13, устанавливаемое на неподвижном горизонтальном основании 14,снабженном блоком подшипников 15, поворотную ШIaтфop ry 16 с выполненными в ней газоподводящими каналами, устанавливаемую в блок подшипников 15 и служащую для поворота вокруг вертикальной оси с помощью рукоятки 17, размещаемой на ней горизонтальной опоры 6 с чувствительным элементом,выполненным в виде соединенных между собой шипа 5 и гиромотора 18, питание которого осуществляется упругими токоподвода0
5
0
5
0
5
0
5
ми 19, размещенными на стойке 20 и механически соединенными с дисковым прерывателем 3 светового потока.
Устройство работает следующим образом.
При определении уводящего момента газостатической опоры 6, обусловленного отклонениями формы шипа и подшипника, а также неточностью выполнения питающих отверстий, токоподво- ды 19 не присоединяют к дисковому прерывателю 3 светового потока. Включают устройство, подавая газ (воздух) в рабочий зазор опоры и подключая питат5е к электронной схеме. Под действием уводящих моментов чувствительный элемент, соединенный с диско-, вым прерывателем светового потока, поворачивается вокруг вертикальной оси и происходит засветка от источников 1 и 2 светового излучения фотоэлектрического датчика 7 угловых перемещений и схемы 11 задержки арретирования. Арретир 10 останавливает дисковый пре- рывател7ь светового потока, устанавливая его в положение электрического нуля датчика угловых перемещений , Далее выполняется установка на нуль измерительного прибора 9.
Процесс измерения углового ускорения начинается с включения электронной схемы управления. При этом включается измерительный прибор, а дисковый прерыватель светового потока раз- арретируется и начинает вместе с чувствительным элементом поворачиваться без начальной скорости. На выходе датчика угловых перемещений появляется сигнал, пропорциональный углу поворота дискового прерывателя, и при достижении определенной величины срабатывает электронная схема управления, вызывающая отключение измерительного прибора и появление
51525А9
сигналу в схеме задержки аррегирова- ния.
Устройство предусматривает возможность измерения уводящих моментов для различных относительных положений чувствительного элемента в газостатической опоре. Количество замеров определяется количеством отверстий, выполненных на диске. После выполнения jg замеров определяется средняя величина действующего на шип в рабочих услови- ях уводящего момента.
Определение восстанавливакзшего га- зодидамического момента опоры в рамках линейной теории сводится к определению ее угловой жесткости.
Процесс определения угловой жесткости заключается в следующем.
Пбсле определения уводящего момента опоры отключается схема 11 задержка арретирования и включается дополнительная схема 12 задержки арретирования. Устанавливают дисковый прерыватель 3 светового потока со щелевым отверстием 1, ориентированным так, чтобы его ось симметрии была параллельна оси вращения гиромотора 18, и подю1ючают токоподводы 19. Под действием уводящего момента и момента от закрутки упругих токоподводов чувствительный элемент будет находиться в равновесии. Поворачивая платформу 16 с помощью рукоятки 17, приводят чувствительный элемент в положение, когда вектор кинетического момента направлен по линии N-S (север-юг), контролируемое оптическим устройством 13. Далее:отклоняют чувствительный элемент от плоскости меридиана на 10-15 и арретируют с помощью дополнительной схемы 12 дисковый прерыватель светового потока. Включают гиро- мотор и после набора номинальных оборотов включают электронную схему управления и разарретируют дисковый прерыватель светового потока.Под действием направляющего момента чувствительный элемент начинает прецессионное движение по совмеще гию вектора кинетического момента с плоскостью меридиана. При совмещении щелевого отверстия 4 со световым потоком на выходе датчика 7 угловых перемещений появляется сигнал, срабатывает электронная схема 8 управления, которая включает измерительный прибор 9 и по- подт отавливает дополнительную схеА9
g
5
0
5
0
5
0
5
0
5
му 12 задержки арретирования к работе. Через половину периода прецессионных колебаний чувствительного элемента происходит повторное совмещение целевого отверстия 4 со световым потоком. В этом случае электронная схема 8 управления отключает измерительный прибор 9 и вызывает Появление сигнала в дополнительной схеме 12 задержки арретирования для остановки чувствительного элемента.
После остановки чувствительного элемента снимаются показания измеряемой величины - время полупериода прецессионных колебаний - и рассчитывается угловая жесткость опоры по формуле
°
t CHQjCosCf ± К.,+ KT-) - I-ilгде Н - кинетический момент ротора
гиромотора; to,- угловая скорость вращения
Земли;
Cf - широта места установки; I - момент инерции ЧЭ относи- .
тельно оси прецессии; К - приведенная жесткость токоподводов;
Ку - коэффициент уводящего момента опоры;
t - полупериод прецессионных колебаний.
Шкала измерительного прибора - электросекундомера может быть програ- дуирована в единицах измерения угловой жесткости.
Формула изобретения
Устройство для определения моментов газостатических опор по авт.св. № 767576, отличающееся тем,что, с целью повьщ1ения точности путем учета угловой жесткости, в него введено,неподвижное основание, в котором на блоке подшипников установлена поворотная платформа для размещения газостатической опоры с выполненными в ней газоподводящими каналами, а в саму опору введен соединенный с шипом опоры гиромотор, образующие чувствительный элемент, вертикальная ось симметрии которого совпадает с вертикальной осью платформы и эта ось перпендикулярна оси вращения гиромотора, питание которого осуществляется упругими тоководами, соединен715254918
.ными с дисковым прерывателем и заг . по линии север-юг и установленный на
креппеннымн на стойке, установленнойосновании, и дополнительная схема
на поворотной платформе, .причем взадержки арретнрования, вход которой
устройство введены статический датчик связан с электронной схемой управлеуглового положения,ориентированньМ И. выход - с арретиром.
| Устройство для определения моментов газостатических опор | 1978 |
|
SU767576A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
