Изобретение относится к точному приборостроению и может быть использовано, например, для построения скважинных приборов (СП) непрерывных малогабаритных гироскопических инклинометров для обследования нефтяных, газовых и геофизических скважин, путем непрерывного движения СП в скважине при автономной начальной выставке в азимуте.
Известен гироскопический инклинометр (АС 1788224 СССР, МКИ E21B 47/02. Инклинометр. / Рогатых Н.П., Куклина Л.А. // БИ 1993, №2).
Для построения гироинерциального блока используются два идентичных (селективно подобранных по дрейфам) гирополукомпаса (ГПК), оси наружных рамок которых совпадают с продольной осью СП. Каждый ГПК состоит из наружных рамок, в которых установлены гироузлы (внутренние рамки с гиромоторами), по осям подвеса установлены датчики углов, которые измеряют углы поворота корпуса СП относительно стабилизированных в пространстве векторов кинетических моментов.
Горизонтальные коррекции ГПК состоят из жидкостных МЧЭ (обычно датчики жидкостные маятниковые типа ДЖМ-9Б) и коррекционных моторов. Так как в ГПК векторы кинетических моментов должны быть повернуты относительно базовых рисок корпуса на равные углы, то приборы должны иметь систему механического арретирования или электрического арретирования, которая, как указывают авторы Рогатых Н.П. и Куклина Л.А., на схеме условно не показана. Но введение систем механического арретирования значительно усложнит конструктивно и, вероятно, увеличит диаметр СП, а для системы электрического арретирования необходимо по осям подвеса гироузлов дополнительно устанавливать коррекционные моторы, что также увеличивает диаметр СП.
К известным техническим решениям можно отнести измерительный блок инклинометра (АС 1827541 СССР, МКИ G01C 19/00. Измерительный блок инклинометра./ Галкин В.И. и др. // БИ 1993, 26).
Измерительный блок инклинометра состоит из магнитного гироскопа типа ГМП-М со сферическим ротором из магнитомягкого материала с цилиндрической полостью по оси его вращения, что необходимо для работы двухкоординатных датчиков углов и датчиков моментов.
Гироскоп ГМП-М с пассивным магнитным подвесом ротора может работать в качестве двухкомпонентного измерителя угловой скорости и трехкомпонентного измерителя ускорений. Для этого сигналы датчиков углов, измеряющие углы отклонения ротора относительно корпуса в двух взаимно перпендикулярных плоскостях, через усилители с последовательно включенными масштабными резисторами, с которых снимаются сигналы, пропорциональные угловым скоростям, подключают к соответствующим входам двухкоординатного датчика моментов.
Недостатки: магнитный гироскоп имеет сложную конструкцию, а сам инклинометр по идеологии построения является точечным.
Известен также инклинометр гироскопического типа (Патент РФ 2004786, МКИ E21B 47/02. Инклинометр. / Белянин Л.Н. и др. // БИ №45, от 15.12.1993).
В этой схеме гироинерциального модуля (ГИМ) рационально объединены два подхода: часть схемы является фрагментом бескарданной системы ориентации (БСО), содержащей двухкомпонентные акселерометр и датчик угловых скоростей (ДУС), жестко закрепленные на корпусе, с осями чувствительности, перпендикулярными продольной оси СП, а вторая часть схемы - классическим трехстепенным гироскопом (ТСГ) с маятниковой горизонтальной коррекцией. При этом из метода на основе БСО заимствуется принцип начальной выставки, но уже для вектора кинетического момента ТСГ, сигнал курсового датчика угла которого используется для формирования азимута скважины, причем в зависимости от режима функционирования - выставка или работа - в ТСГ включается или выключается горизонтальная коррекция.
Недостатки: наличие ТСГ в кардановом подвесе, у которого при искривлении скважины рамки имеют тенденцию к совмещению, а также значительные габариты по диаметру СП. Кроме того, при движении в скважине имеется вращение СП вокруг продольной оси, что отрицательно сказывается на измерениях акселерометра и ДУС.
Известен также гироскопический инклинометр (Патент РФ №2030574, МКИ E21B 47/02. Способ определения азимута скважины в последовательных точках и гироскопический инклинометр. / Григорьев Н.И. и др. // Бюл. №7, 10.03.95), гироинерциальный модуль (ГИМ) которого построен на базе двух акселерометров (измерителей ускорений) и двух двухкоординатных датчиков угловых скоростей (измерителей угловых скоростей) на основе трехстепенных гироскопов, например, динамически настраиваемых гироскопов, которые жестко закреплены на корпусе скважинного прибора. При этом датчики угловых скоростей в процессе формирования измерительной информации устанавливают последовательно в два положения, отличающиеся друг от друга разворотом на 180° относительно оси, перпендикулярной к осям измерения угловых скоростей, совпадающей с продольной осью СП.
Указанные гироинерциальные модули обуславливают инклинометру следующие недостатки: инклинометр работает только в точечном режиме, что увеличивает время обследования скважин и приводит к снижению производительности инклинометрических работ, кроме того, такая схема гироинерциального модуля не позволяет создавать малогабаритные инклинометры.
Известен гироинерциальный модуль гироскопического инклинометра, описанный в патенте РФ 2100594 «Способ определения азимута и зенитного угла скважины и гироскопический инклинометр». / Е.А.Порубилкин, B.C.Фрейман, С.В.Кривошеев и др. // БИ №36, 1997, принятый за прототип, в котором гироинерциальный модуль построен на базе одноосного индикаторного гиростабилизатора.
Гироинерциальный модуль гироскопического инклинометра содержит одноосный индикаторный гиростабилизатор, на платформе которого жестко установлены измерители ускорений с взаимно перпендикулярными осями чувствительности и ориентированными перпендикулярно оси стабилизации гиростабилизатора и трехстепенной гироскоп, второй датчик угла которого через усилитель стабилизации соединен с двигателем отработки, кинематически связанным с осью стабилизации, на которой закреплен выходной датчик угла, выполненный, например, в виде синусно-косинусного трансформатора, и блок цифровой обработки, к соответствующим входам которого подключены выходы выходного датчика угла гиростабилизатора, выходы измерителей ускорений и выход измерителя угловой скорости, причем первый выход блока цифровой обработки соединен с управляющим входом задатчика эталонного тока, сигнальный выход которого подключен к первому датчику момента гироскопа, расположенному на оси, перпендикулярной оси стабилизации, а второй и третий выходы блока цифровой обработки через каротажный кабель соединены с наземным вычислителем.
Для определения начальной ориентации осей чувствительности измерителей ускорений платформу, на которой они установлены, в соответствии со способом, приведенном в данном патенте, вращают в азимуте вокруг оси стабилизации (на один-два оборота). При этом по сигналам канала измерения угловой скорости трехстепенного гироскопа формируют массив измерений горизонтальной составляющей угловой скорости вращения Земли и, используя процедуру численной оптимизации функции невязки, представляющей сумму квадратов разности эталонной угловой скорости

где ωв - средняя угловая скорость вращения платформы;
Ωзг - горизонтальная составляющая угловой скорости вращения Земли;

αx1 - фазовый сдвиг, который является азимутальным углом осей чувствительности измерителей ускорений в момент начала выставки;
j - номер измерения;
и измеренной угловой скорости ωj на всем наборе измерений, минимизируют ее по фазовому сдвигу, а азимутальный угол осей чувствительности измерителей ускорений в момент окончания выставки определяют по формуле
αxв=ψв-ψ1+αx1,
где ψ1, ψв - углы поворота осей чувствительности измерителей ускорений относительно корпуса скважинного прибора вокруг оси стабилизации в моменты начала и окончания выставки соответственно.
Недостатком гироинерциального модуля прототипа является потенциально более низкая точность определения начального азимутального угла αхв, который является ключевым элементом при решении задачи навигации движения СП в скважине.
Применение двухкомпонентного измерителя угловой скорости в режиме начальной выставки позволяет получить избыточную информацию, что, как известно, способствует при определенной структуре алгоритмов повышению точности определения того параметра, который функционально связан с измеряемой величиной. В данном случае параметром является начальный азимутальный угол αхв, а измеряемой величиной - горизонтальная составляющая угловой скорости вращения Земли в проекции на измерительные оси двухкомпонентного измерителя угловой скорости.
Технический результат заявляемого изобретения состоит в повышении точности определения начального азимутального угла осей чувствительности измерителей ускорений гироинерциального модуля, построенного по схеме одноосного индикаторного гиростабилизатора, а следовательно, и в целом - повышению точности работы инклинометра.
Технический результат достигается тем, что в гироинерциальном модуле гироскопического инклинометра, содержащем одноосный гироскопический стабилизатор,
на платформе которого жестко установлены два измерителя ускорений с двумя взаимно перпендикулярными осями чувствительности, которые перпендикулярны оси стабилизации гиростабилизатора, трехстепенной гироскоп, по осям подвеса которого установлены датчики углов и датчики моментов, двигатель отработки, соединенный с выходом усилителя стабилизации и кинематически связанный с осью стабилизации, на которой закреплен выходной датчик угла, выполненный в виде синусно-косинусного трансформатора, и блок цифровой обработки, к первому и второму входам которого подключены выходы выходного датчика угла гиростабилизатора, к третьему и четвертому - выходы измерителей ускорений, к шестому - выход датчика температуры, а к пятому - второй сигнальный выход первого усилителя канала измерения угловой скорости, на сигнальный вход которого подключен выход датчика угла относительно оси подвеса внутренней рамы, а первый сигнальный выход первого усилителя канала измерения угловой скорости подключен к датчику момента относительно оси подвеса наружной рамы, при этом первый выход блока цифровой обработки соединен с управляющим входом задатчика эталонного тока, второй и третий выходы блока цифровой обработки через каротажный кабель подключены к наземному вычислителю, новым является то, что
что трехстепенной гироскоп установлен в поворотной раме, ось подвеса которой перпендикулярна оси стабилизации гироскопического стабилизатора, совпадает с осью чувствительности одного из измерителей ускорений и с которой кинематически связаны датчик угла позиционирования поворотной рамы и двигатель разворота, к входу которого через усилитель двигателя разворота подключен выход третьего управляемого коммутатора, первый и второй управляющие входы которого соединены с первым и вторым выходами логического устройства, первый сигнальный вход третьего управляемого коммутатора подключен ко второму выходу задатчика эталонного тока, первый выход которого подключен ко второму сигнальному входу третьего управляемого коммутатора и к сигнальному входу второго управляемого коммутатора, выход которого соединен с вторым входом усилителя стабилизации, первый вход которого соединен с первым сигнальным выходом первого управляемого коммутатора, управляющий вход которого соединен с третьим выходом логического устройства, четвертый выход которого соединен с управляющими входами первого и второго усилителей каналов измерения угловой скорости и управляющим входом второго управляемого коммутатора, сигнальный вход первого управляемого коммутатора соединен с датчиком угла относительно оси подвеса наружной рамы, второй сигнальный выход первого управляемого коммутатора соединен с сигнальным входом второго усилителя канала измерения угловой скорости, первый сигнальный выход которого соединен с датчиком момента относительно оси подвеса внутренней рамы, а к первому и второму входам логического устройства подключены четвертый и пятый выходы блока цифровой обработки, к седьмому входу которого подключен второй сигнальный выход второго усилителя канала измерения угловой скорости, а к третьему и четвертому входам логического устройства подключены третий и четвертый выходы преобразователя сигналов, первый и второй выходы которого соединены с третьим и четвертым сигнальными входами третьего управляемого коммутатора, а первый и второй входы преобразователя сигналов соединены с выходами датчика угла позиционирования поворотной рамы.
Сущность изобретения поясняется чертежами, приведенными на фиг.1, фиг.2, фиг.3, фиг.4, где
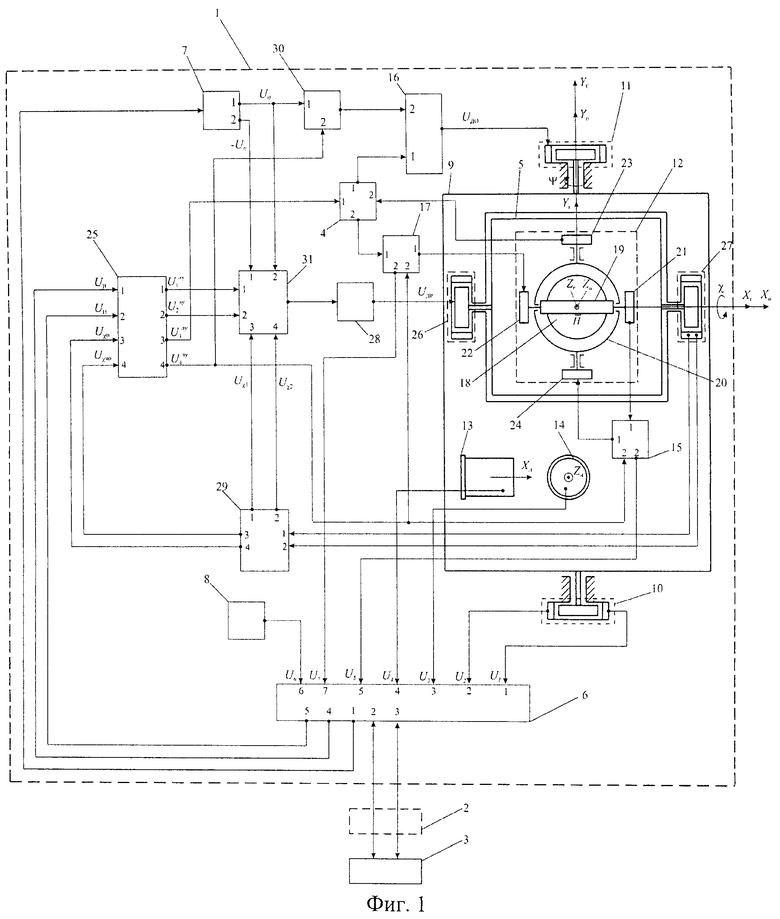
фиг.1 - структурно-кинематическая схема гироинерциального модуля гироскопического инклинометра;
фиг.2 иллюстрирует взаимное положение систем координат (СК) при повороте поворотной рамы на угол χ;
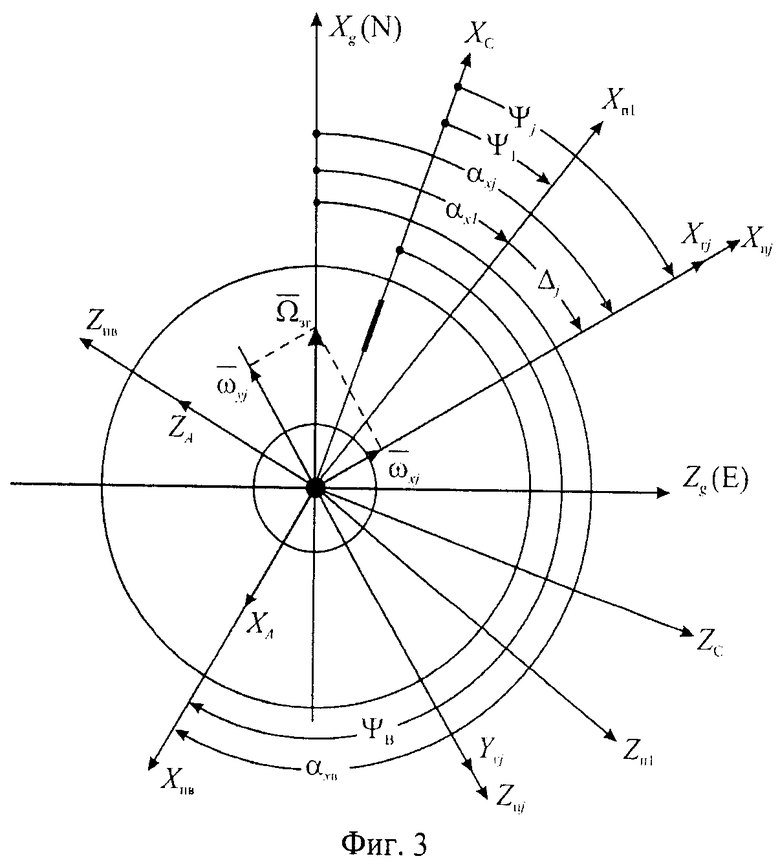
фиг.3 иллюстрирует взаимное положение СК при вращении осей, связанных с гироскопом и платформой, в процессе начальной азимутальной выставки;
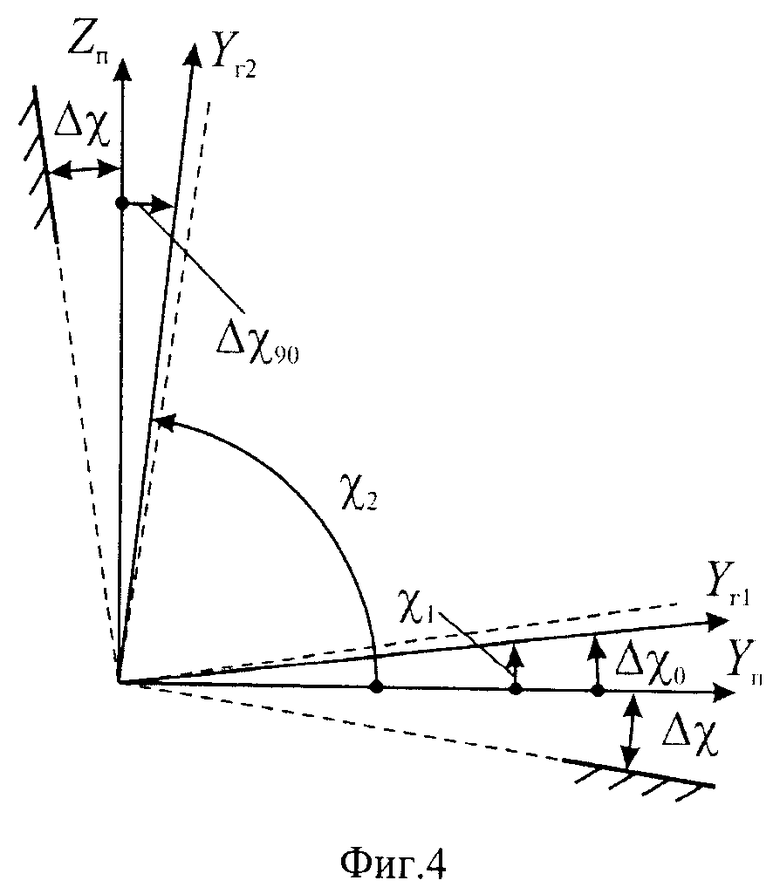
фиг.4 поясняет работу датчика угла позиционирования рамы.
На фиг.1 приняты следующие обозначения:
1 - гироинерциальный модуль (ГИМ) на базе одноосного гиростабилизатора (ГС), входящий в состав скважинного прибора (СП);
2 - каротажный кабель (КК);
3 - наземный вычислитель;
4 - первый управляемый коммутатор (имеет один управляющий вход, один сигнальный вход и два сигнальных выхода);
5 - поворотная рама;
6 - блок цифровой обработки (БЦО);
7 - задатчик эталонного тока (имеет управляющий вход и два выхода);
8 - датчик температуры;
9 - платформа ГС;
10 - выходной датчик угла, выполненный в виде синусно-косинусного трансформатора (СКТ);
11 - двигатель отработки (ДО);
12 - трехстепенной гироскоп (или двухканальный гироскоп);
13, 14 - измерители ускорений;
15 - первый усилитель канала измерения угловой скорости (имеет один управляющий вход, один сигнальный вход и два сигнальных выхода);
16 - усилитель стабилизации (УС);
17 - второй усилитель канала измерения угловой скорости (имеет один управляющий вход, один сигнальный вход и два сигнальных выхода);
18 - ротор трехстепенного гироскопа;
19 - внутренняя рамка (BP) трехстепенного гироскопа;
20 - наружная рамка (HP) трехстепенного гироскопа;
21 - датчик угла относительно оси подвеса BP (ДУ1);
22 - датчик момента относительно оси подвеса BP (ДМ1);
23 - датчик угла относительно оси подвеса HP (ДУ2);
24 - датчик момента относительно оси подвеса HP (ДМ2);
25 - логическое устройство (ЛУ) (имеет четыре входа и четыре выхода);
26 - двигатель разворота (ДР);
27 -датчик угла позиционирования рамы (ДУПР);
28 - усилитель двигателя разворота (УДР);
29 - преобразователь сигналов (имеет два сигнальных входа и четыре сигнальных выхода);
30 - второй управляемый коммутатор (имеет управляющий вход, сигнальный вход и сигнальный выход);
31 - третий управляемый коммутатор (имеет два управляющих входа, четыре сигнальных входа и один сигнальный выход);
XCYCZC - СК, связанная с корпусом СП, причем YC - продольная ось СП;
XnYnZn - СК, связанная с платформой 9, причем Yп - ось подвеса платформы, совпадает с осью YС СП;
XгYгZг - СК, связанная с гироскопом 12 (оси Xг, Yг являются измерительными осями гироскопа в режиме двухканального ДУС, когда он повернут на угол χ=90°);
ХА, ZA - оси чувствительности измерителей ускорений 13 и 14, причем оси чувствительности совпадают с осями Хп, Zn платформы 9;
ψ - угол поворота платформы 9 относительно корпуса;
UДО - входное напряжение ДО 11;
UДР - входное напряжение ДР 26;
UB - команда перехода к режиму выставки, подаваемая с БЦО 6 на ЛУ 25;
UИ - команда перехода к режиму измерения, подаваемая с БЦО 6 на ЛУ 25;
Uχ0,Uχ90 - логические выходные сигналы, поступающие на ЛУ 25 от преобразователя сигналов 29 и соответствующие наличию или отсутствию выходных напряжений ДУПР 27 в заданных диапазонах;
Uχ1, Uχ2 - выходные напряжения преобразователя сигналов 29, пропорциональные углу отклонения рамы от положений χ=0° и χ=90°, измеряемые ДУПР 27;
U1…U7 - входные напряжения БЦО 6;
U0, -U0 - выходные напряжения задатчика эталонного тока 7.
На фиг.2 и фиг.3 приняты следующие обозначения:
XgYgZg - земная географическая СК, причем ось Xg ориентирована на север (N), ось Yg ориентирована по местной вертикали, Zg дополняет систему координат до правой (направлена на восток);
XпjYпjZпj, 
XпвYпвZпв - СК, связанная с платформой 9 в момент перехода к режиму измерения;
XгZгZг - СК, связанная с гироскопом 12; (оси Xг, Yг являются измерительными осями гироскопа в режиме двухканального ДУС, когда он повернут на угол χ=90°);
XгjYгjZгj,
ψj,
ψB - угол поворота платформы 9 в момент перехода к режиму измерения;
χ - угол поворота поворотной рамы 5;
αxj,
αхв - азимут оси Хп платформы 9 в момент перехода к режиму измерения;
Δj - угол поворота платформы 9 относительно начального положения в режиме выставки.
На фиг.4 приняты следующие обозначения:
Yг1 - ось подвеса HP 20 гироскопа 12 при угле поворота поворотной рамы 5, равном χ=χ1; при таком положении ДУПР 27 измеряет угол Δχ0 отклонения поворотной рамы 5 от положения χ=0°;
Yг2 - ось подвеса HP 20 гироскопа 12 при угле поворота поворотной рамы 5, равном χ=χ2; при таком положении ДУПР 27 измеряет угол Δχ90 отклонения поворотной рамы 5 от положения χ=90°;
Δχ - зоны измерения углов отклонения поворотной рамы 5 от положения χ=0° и χ=90°.
Гироинерциальный модуль гироскопического инклинометра содержит платформу 9, на которой размещена полезная нагрузка в виде двух измерителей ускорений 13 и 14, оси чувствительности ХА, ZA которых взаимно перпендикулярны и перпендикулярны оси Yп подвеса платформы 9. Также на платформе 9 установлен гироскопический датчик 12, в качестве которого может использоваться трехстепенной гироскоп или двухканальный гироскоп (например, гироскоп с внутренним упругим подвесом или на сферической опоре). При этом углы поворота вектора 
При нулевом положении рамы 5 (χ=0°) ось Yг подвеса наружной рамки 20 гироскопа 12 совпадает с осью Yп подвеса платформы 9, ось Zг, по которой направлен вектор кинетического момента
На платформе 9 установлены упоры, ограничивающие угол поворота поворотной рамы 5 в пределах (0°-Δχ; 90°+Δχ), где Δχ=2…5° (см. фиг.4). Угол поворота χ поворотной рамы 9 измеряется датчиком угла поворотной рамы 27, который измеряет отклонение Δχ0 рамы от положения χ=0° или отклонение Δχ90 рамы от положения χ=90°. Соответственно с выходов датчика угла 27 снимаются напряжения, пропорциональные вышеуказанным отклонениям. В качестве датчика угла может использоваться, например, синусно-косинусный трансформатор, с синусной обмотки которого снимается сигнал, соответствующий отклонению Δχ0, а с косинусной - отклонению Δχ90. Другим вариантом реализации данного датчика угла является применение, например, индуктивного датчика угла, имеющего две зоны пропорциональности в положениях χ=0° и χ=90°, величина которых относительно заданных положений равна Δχ=±(2…5)°. Если поворотная рама 5 находится вне зон пропорциональности, то выходные сигналы с датчиков углов будут отсутствовать.
Выход датчика угла 21, установленного по оси подвеса BP 19, через первый усилитель контура измерения угловой скорости 15 подключен к датчику момента 24 по оси подвеса HP, образуя контур измерения угловой скорости в проекции на ось подвеса BP. В режиме «измерение» этот контур является контуром электрического арретирования.
Выход датчика угла 23, установленного по оси подвеса HP 20, через первый управляемый коммутатор 4 и второй усилитель контура измерения угловой скорости 17 подключен к датчику момента 22 по оси подвеса BP 19, образуя контур измерения угловой скорости в проекции на ось подвеса HP в режиме «выставка». В режиме «измерение» выход датчика угла 23 через первый управляемый коммутатор 4 (второй вход - первый выход) и усилитель стабилизации 16 подключается на вход двигателя отработки 11, образуя контур индикаторной стабилизации.
Центральным звеном в управлении работой ГИМ является логическое устройство (ЛУ) 25, которое имеет четыре входа (логических) и четыре выхода (логических). На первый и второй входы ЛУ 25 поступают два управляющих сигнала UB и UИ. Эти сигналы формируются в БЦО 6 по команде наземного вычислителя 3, которая передается в цифровой форме последовательным кодом по каротажному кабелю 2. При этом сигналы UB и UИ определяют режим работы в соответствии с таблицей №1.
На третий и четвертый входы ЛУ 25 поступают два управляющих сигнала Uχ0 и Uχ90, которые формируются в преобразователе сигналов 29, входы которого подключены к выходам датчика угла позиционирования рамы 27. Причем преобразователь сигналов работает таким образом, что указанные напряжения имеют высокий уровень (соответствуют логической единице) при наличии выходного напряжения на соответствующих каналах ДУПР 27. При отсутствии выходного напряжения сигналы Uχ0 и Uχ90 имеют низкий уровень, что соответствует логическому нулю.
Выходные сигналы логического устройства определяются в соответствии с таблицей №2.
В таблице приведены не напряжения UB, UИ, Uχ0, Uχ90, 




Выходные сигналы ЛУ, приведенные в таблице №2, могут быть получены с помощью следующих логических функций:
Y1=X1; 

Пояснение функции выходных сигналов ЛУ 25, приведенных в таблице:
1)

2) 
3) 

Напряжение 
Кроме того, сигнал 
Рассмотрим работу управляемых коммутаторов.
Первый управляемый коммутатор 4
Управляемый коммутатор 4 имеет один сигнальный вход и два сигнальных выхода. На сигнальный вход поступает выход датчика угла 23 по оси подвеса HP 20 гироскопа 12. Первый сигнальный выход подключен к первому входу усилителю стабилизации 16, а второй - к сигнальному входу второго усилителя контура измерения угловой скорости 17.
Управляемый коммутатор 4 управляется по сигналу 


Второй управляемый коммутатор 30
Управляемый коммутатор 30 имеет один сигнальный вход и один сигнальный выход. На сигнальный вход подключен первый выход задатчика эталонного тока 7, который, при поступлении на его управляющий вход соответствующего сигнала от БЦО 6, формирует на первом выходе напряжение U0.
Выход управляемого коммутатора подключен ко второму входу усилителя стабилизации 16.
По команде 

Третий управляемый коммутатор 31
Управляемый коммутатор 31 имеет четыре сигнальных входа, один сигнальный выход. На сигнальные входы подключены выходы задатчика эталонного тока 7 и выходы преобразователя сигналов 29. Задатчик эталонного тока при поступлении соответствующего сигнала от БЦО 6 формирует на своих выходах напряжения U0 и -U0. На выходах преобразователя сигналов 29 формируются напряжения Uχ1, Uχ2, пропорциональные соответственно углам Δχ0 и Δχ90 отклонения рамы от положений χ=0° и χ=90°, измеряемые ДУПР 27 и прошедшие преобразование в преобразователе сигналов 29.
Выход управляемого коммутатора 31 зависит от сигналов 



Напряжение с выхода третьего управляющего коммутатора 31 через усилитель двигателя разворота 28 поступает на двигатель разворота 26 поворотной рамы 5. При этом двигатель 26 начинает поворачивать раму 5 в одно из двух заданных положений χ=0° или χ=90°.
ГИМ может работать в трех режимах:
«подготовка», «выставка» и «измерение».
Управление ГИМ осуществляется оператором с наземного вычислителя 3, который связан с блоком цифровой обработки (БЦО) 6 через каротажный кабель 2.
Режим «Подготовка».
В соответствии с таблицей №2 режим состоит из этапов 1-6.
В начале работы скважинный прибор (СП) ГИ выставляется с помощью зажимов в вертикальное положение в устье скважины. На ГИМ ГИ подается питание, при этом ротор 18 гироскопа 12 начинает разгоняться, измерители ускорений 13 и 14 начинают работать.
На этапах 1-3 осуществляется приведение и стабилизация поворотной рамы в положении χ=0°. По команде оператора БЦО 6 формирует напряжения UB=0, UИ=0, поступающие на ЛУ 25. Сигналы UB, UИ сохраняют свое состояние на всем протяжении этапов 1-3.
Независимо от сигналов Uχ0 и Uχ90, а следовательно, и от положения поворотной рамы 5, ЛУ 25 формирует сигналы 


Сигнал 


Выходные сигналы ЛУ 25 

Этап 1.
Этап 1 начинается в случае, если поворотная рама 5 находится в положении, близком к χ=90°. При этом сигналы, поступающие на ЛУ 25 с преобразователя сигналов 29, принимают значения Uχ0=0, Uχ90=1. Согласно таблице №2, выходные напряжения ЛУ 25 примут при этом значения 


где kУДР - коэффициент усиления УДР 28.
Под действием напряжения UДР=-kУДРU0 поворотная рама 5 начинает поворачиваться в сторону нулевого положения. При этом, выходя из зоны измерения отклонения от положения χ=90°, сигнал Uχ90 становится равным Uχ90=0. Напряжение Uχ0 по-прежнему Uχ0=0. При этом осуществляется переход к этапу 2.
Этап 2
На этом этапе поворотная рама 5 занимает среднее положение, при котором отсутствуют сигналы обоих каналов датчика угла позиционирования рамы, при этом выходные напряжения преобразователя сигналов 29 принимают значения Uχ0=0, Uχ90=0. Согласно таблице №2 выходные напряжения ЛУ 25 примут значения 


поступающего на ДР 26.
Когда поворотная рама подойдет к зоне измерения в области нулевого положения, появляется сигнал ДУПР 27 в канале измерения отклонения от положения χ=0°. При этом преобразователь сигналов 29 формирует сигнал Uχ0=1. Напряжение Uχ90 по-прежнему Uχ90=0. При этом осуществляется переход к этапу 3.
Этап 3.
На этом этапе поворотная рама 5 занимает положение, близкое к положению χ=0°. При этом выходные напряжения преобразователя сигналов 29 принимают значения Uχ0=1, Uχ90=0. Согласно таблице №2 выходные напряжения ЛУ 25 примут значения


Выход УДР 28 подключен к ДР 26, на который, соответственно, поступает напряжение

под действием которого ДР 26 доводит поворотную раму 5 в нулевое положение и удерживает (стабилизирует) раму в этом положении с заданной точностью.
После того как рама 5 приведена в нулевое положение с заданной точностью, оператору предлагается, пользуясь сигналами акселерометров выставить СП ГИ по вертикали с требуемой точностью.
Этап 4.
По окончании выставки СП по вертикали с требуемой точностью оператору предлагается перейти к развороту гироскопа на 90°. По команде оператора БЦО 6 формирует напряжения UВ=1, UИ=0, поступающие на ЛУ 25. Сигналы UB, UИ сохраняют свое состояние на всем протяжении этапов 4-6.
Независимо от сигналов Uχ0 и Uχ90, а, следовательно, и от положения поворотной рамы 5, ЛУ 25 формирует сигналы 



Выходные сигналы ЛУ 25 




Под действием напряжения 
Этап 5
На этом этапе поворотная рама 5 занимает среднее положение, при котором отсутствуют сигналы обоих каналов датчика угла позиционирования рамы 27. При этом выходные напряжения преобразователя сигналов 29 принимают значения Uχ0=0, Uχ90=0. Так как UB=1, UИ=0, то согласно таблице №3 выходные напряжения ЛУ 25 примут значения 

поступающего на ДР 26.
Когда поворотная рама подошла к зоне измерения в области положения χ=90°, появляется сигнал в ДУПР 27 в канале измерения отклонения от положения χ=90°. При этом преобразователь сигналов 29 формирует сигнал Uχ90=1. Напряжение Uχ0 по-прежнему Uχ0=0. При этом осуществляется переход к этапу 6.
Этап 6.
На этом этапе поворотная рама 5 занимает положение, близкое к положению χ=90°. При этом выходные напряжения преобразователя сигналов 29 принимают значения Uχ0=0, Uχ90=1. Согласно таблице №2 выходные напряжения ЛУ 25 примут значения 


Выход УДР 28 подключен к ДР 26, на который, соответственно, поступает напряжение

под действием которого ДР 26 доводит поворотную раму 5 в положение χ=90° и удерживает (стабилизирует) раму в этом положении с заданной точностью.
Режим «Выставка».
В соответствии с таблицей работы ЛУ25 режим состоит из этапа 7.
Этап 7.
По достижении χ=90° с заданной точностью оператору предлагается перейти к режиму «Выставка». По команде оператора БЦО 6 формирует напряжения UВ=1, UИ=1, поступающие на ЛУ 25. Так как поворотная рама 5 при этом удерживается в положении χ=90°, то сигналы, формируемые преобразователем сигналов 29, сохраняют состояние Uχ0=0, Uχ90=1. Согласно таблице №2 выходные напряжения ЛУ 25 сохранят значения 


под действием которого ДР 26 удерживает (стабилизирует) раму в положении χ=90° с заданной точностью.
Выходные напряжения 



Сигнал 
Сигнал 
Второй управляемый коммутатор 30 по сигналу

где kу2 - коэффициент усиления УС 16 по второму входу. При этом ДО 11 начинает вращать платформу 9 с постоянной угловой скоростью (1-2%).
Во время вращения платформы 9 в дискретных точках измеряются и записываются проекции горизонтальной угловой скорости вращения Земли на оси Xгj и Yгj, а также показания СКТ 10.
По совершении N оборотов сигналы UВ и UИ принимают значения UB=0 и UИ=0. При этом состояние входных сигналов ЛУ 25 совпадает с состоянием входных сигналов на этапе 1, т.е. UВ=0, UИ=0, Uχ0=0, Uχ90=1 Таким образом, этапы 8, 9, 10 будут совпадать с этапами 1, 2, 3 соответственно.
Вращение платформы прекращается, а поворотная рама 5 возвращается в нулевое положение, которое необходимо на этапе измерения.
По сохраненным в наземном вычислителе массивам угловых скоростей и сигналов СКТ 10 вычисляется азимут осей платформы 9 (осей чувствительности измерителей ускорений) на момент начала выставки по формуле
где αх1 - азимут оси Хп1 платформы на момент начала выставки; 

Формула (11) получена на основании применения метода наименьших квадратов к массивам измеренных угловых скоростей и углов поворота платформы. При этом формируется функция невязки как сумма квадратов разности между измеренными




где 

ωдх, ωдy - систематические составляющие дрейфа, которая в развернутом виде принимает вид

Условия минимизации - три уравнения, представляющие равенство нулю частных производных по искомым параметрам αх1, ωдх, ωду



решением которых (при условии, что платформа совершает целое число оборотов) являются формула (11) и систематические составляющие дрейфа

Режим «Измерение»
Этапы 8-10.
Последовательность действий в этих этапах работы соответствует ранее рассмотренным этапам 1-3.
Этап 11.
По завершении начальной выставки и приведении поворотной рамы 5 в положение χ=0°, оператору предлагается перейти к режиму измерения. При поступлении от оператора соответствующей команды с БЦО 6 на ЛУ 25 поступают напряжения UB=0, UИ=1. Сигналы, поступающие с преобразователя сигналов 29, имеют значения Uχ0=1, Uχ90=0. Согласно таблице №2 выходные напряжения ЛУ 25 примут значения 



Согласно таблице №3 по сигналам 


Выход УДР 28 подключен к ДР 26, на который, соответственно, поступает напряжение

под действием которого ДР удерживает (стабилизирует) раму в положении χ=0° с заданной точностью на всем протяжении режима измерения.
Сигнал 
По сигналу 

Для начала работы алгоритма измерения параметров скважины необходимо знать азимут αхв осей чувствительности акселерометров на момент начала измерения (см. фиг.3). Азимут αхв может быть определен как сумма вычисленного в результате выставки азимута ах] и угла, на которой повернулась платформа 9 от момента начала выставки до момента начала режима измерения (ψB-ψ1)

где ψB - угол поворота платформы 9 в момент начала измерения (на момент окончания выставки - см. фиг.3).
Полученный угол (16) используется для формирования начальной матрицы ориентации в соответствии со способом, приведенным в прототипе.
К вопросу о реализации гироинерциального модуля.
По идее построения ГИМ является измерительной системой с переменной структурой, у которой гироскоп в зависимости от режима работы меняет свою ориентацию на 90°. Если вектор кинетического момента гироскопа параллелен оси подвеса платформы, то он превращается в двухканальный измеритель угловой скорости. Если вектор кинетического момента гироскопа перпендикулярен оси подвеса платформы, то он превращается в датчик углов для индикаторной стабилизации платформы.
Как и в прототипе, выходными сигналами ГИМ являются: сигналы двух измерителей ускорений, сохраненный начальный азимут платформы, вычисленные систематические составляющие дрейфа гироскопа и выходные сигналы СКТ.
Предлагаемый ГИМ проектировался с таким расчетом, чтобы математическое обеспечение алгоритмов ориентации и навигации гироинклинометра в режиме «Измерение», когда скважинный прибор опускается (поднимается) в скважину на каротажном кабеле, оставалось без изменения, т.е. соответствовало бы алгоритмам прототипа.
Таким образом, предлагаемый ГИМ позволяет строить непрерывный ГИ с автономной азимутальной выставкой повышенной точности, алгоритм функционирования которого при спуске (подъеме) соответствует алгоритмам ГИ с одноосным индикаторным гиростабилизатором, как указано в патенте №2100594 прототипа, СП которого имеет диаметр 73 мм.
Некоторые вопросы технической реализации.
1. В качестве гироскопа ГИМ в данном устройстве планируется применить серийный динамически настраиваемый гироскоп, например, ГВК-16.
2. Поворотной рамой при этом будет оправка с полуосями, к которой жестко крепится гироскоп.
3. Привод рамы: малогабаритный двигатель серии ДПР, который кинематически с помощью, например, безлюфтовых шестеренок будет передавать момент на ось поворотной рамы. Конструктивно ДПР будет размещен таким образом, чтобы размер СП по диаметру не увеличивался.
4. Двигатель отработки: серийный моментный двигатель постоянного тока с возбуждением от постоянных магнитов ДС-27 (аналогично прототипу).
5. Датчик угла позиционирования рамы, например, индуктивного типа, имеющий две зоны пропорциональности в области 0° и 90° угла поворота рамы.
6. Измерители ускорений - малогабаритные акселерометры АТ-1104.
7. Выходной датчик угла, выполненный в виде синусно-косинусного трансформатора (аналогично прототипу).
8. Электронные узлы могут быть реализованы на серийных аналоговых и цифровых схемотехнических элементах.

Изобретение относится к точному приборостроению и может быть использовано, например, для построения скважинных приборов (СП) непрерывных малогабаритных гироскопических инклинометров (ГИ) с автономной начальной выставкой (АНВ) в азимуте для определения координат оси симметрии скважин. Гироинерциальный модуль ГИ содержит одноосный гиростабилизатор (ГС), на платформе (9) которого размещены два измерителя ускорений (13, 14) и трехстепенной гироскоп (12), установленный в поворотной раме (ПР) (5), ось подвеса которой перпендикулярна оси стабилизации (ОС). В режиме измерения ПР (5) повернута в положение, при котором вектор кинетического момента гироскопа (12) перпендикулярен оси подвеса платформы (9), а гироскоп (12) используется в качестве чувствительного элемента ГС. В режиме АНВ ОС устанавливают в вертикальное положение по сигналам измерителей ускорений (13, 14), а ПР (5) разворачивают на 90°, превращая гироскоп (12) в двухкомпонентный измеритель угловой скорости. Платформу (9) вращают с постоянной скоростью, измеряют и записывают угол ее поворота и угловые скорости. По полученным данным вычисляется начальный азимут осей платформы (9). Использование ПР (5) позволяет реализовать в одном приборе алгоритмы измерения, основанные на использовании ГС, и алгоритмы АНВ, основанные на измерении горизонтальной составляющей угловой скорости вращения Земли относительно двух осей, что способствует повышению точности определения начального азимута, а следовательно, и точности работы прибора. 4 ил., 3 табл.
Гироинерциальный модуль гироскопического инклинометра, содержащий одноосный гиростабилизатор, на платформе которого жестко установлены два измерителя ускорений с двумя взаимно перпендикулярными осями чувствительности, которые перпендикулярны оси стабилизации гиростабилизатора, трехстепенной гироскоп, по осям подвеса которого установлены датчики углов и датчики моментов, двигатель отработки, соединенный с выходом усилителя стабилизации и кинематически связанный с осью стабилизации, на которой закреплен выходной датчик угла в виде синусно-косинусного трансформатора, и блок цифровой обработки, к первому и второму входам которого подключены выходы выходного датчика угла гиростабилизатора, к третьему и четвертому - выходы измерителей ускорений, к шестому - выход датчика температуры, а к пятому - второй сигнальный выход первого усилителя канала измерения угловой скорости, на сигнальный вход которого подключен выход датчика угла относительно оси подвеса внутренней рамы, а первый сигнальный выход первого усилителя канала измерения угловой скорости подключен к датчику момента относительно оси подвеса наружной рамы, при этом первый выход блока цифровой обработки соединен с управляющим входом задатчика эталонного тока, второй и третий выходы блока цифровой обработки через каротажный кабель подключены к наземному вычислителю, отличающийся тем, что трехстепенной гироскоп установлен в поворотной раме, ось подвеса которой перпендикулярна оси стабилизации гироскопического стабилизатора, совпадает с осью чувствительности одного из измерителей ускорений и с которой кинематически связаны датчик угла позиционирования поворотной рамы и двигатель разворота, к входу которого через усилитель двигателя разворота подключен выход третьего управляемого коммутатора, первый и второй управляющие входы которого соединены с первым и вторым выходами логического устройства, первый сигнальный вход третьего управляемого коммутатора подключен ко второму выходу задатчика эталонного тока, первый выход которого подключен ко второму сигнальному входу третьего управляемого коммутатора и к сигнальному входу второго управляемого коммутатора, выход которого соединен с вторым входом усилителя стабилизации, первый вход которого соединен с первым сигнальным выходом первого управляемого коммутатора, управляющий вход которого соединен с третьим выходом логического устройства, четвертый выход которого соединен с управляющими входами первого и второго усилителей каналов измерения угловой скорости и управляющим входом второго управляемого коммутатора, сигнальный вход первого управляемого коммутатора соединен с датчиком угла относительно оси подвеса наружной рамы, второй сигнальный выход первого управляемого коммутатора соединен с сигнальным входом второго усилителя канала измерения угловой скорости, первый сигнальный выход которого соединен с датчиком момента относительно оси подвеса внутренней рамы, а к первому и второму входам логического устройства подключены четвертый и пятый выходы блока цифровой обработки, к седьмому входу которого подключен второй сигнальный выход второго усилителя канала измерения угловой скорости, а к третьему и четвертому входам логического устройства подключены третий и четвертый выходы преобразователя сигналов, первый и второй выходы которого соединены с третьим и четвертым сигнальными входами третьего управляемого коммутатора, а первый и второй входы преобразователя сигналов соединены с выходами датчика угла позиционирования поворотной рамы.
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| RU 2004786 С1, 15.12.1993 | |||
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1997 |
|
RU2130118C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| Измерительный блок инклинометра | 1991 |
|
SU1827541A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| JP 5141970 A, 08.06.1993 | |||

