/
Изобретение относится к тренажерам транспортных средств и может быть использовано для обучения водителей землеройных машин.
Известны тренажеры водителей землеройных машин, содержащие блок управления, выход которого соединен с первыми входами блоков имитации двигателя машины, отображения информации, моделирования землеройной машины, блок задания алгоритмов обучения, выход которого соединен с вторыми входами блоков имитации двигателя машины, отображения информации, моделирования землеройной машины, блок контроля и управления последовательностью операций обучений, блок управления сигнализацией ошибки, устройство сигнализации ошибки, где выход блока управления соединен с первыми входами блока контроля и управления последовательностью операций обучения и блока управления сигнализацией ошибки, а выход блока контроля и управления последовательностью операций обучения соединен с третьим входом блока управления сигнализацией ошибки, блока имитации двигателя машины, блока отображения информации, блока моделирования землеройной машины, выход блока управления сигнализацией ошибки соединен с входом устройства сигнализации ошибки и третьим входом блока контроля и управления последовательностью операций обучения.
Это устройство принято за прототип. Оно выполнено так, что в блоке задания алгоритма обучения выбирается и задается выбранный алгоритм обучения (такой, например, как запуск двигателя электростартером, запуск двигателя зимой, вождение, работа бульдозером, работа рабочим органом и т.п.). При этом в блоке отображения информации, выполненном в виде сочетания табло алгоритмов обучения и информационного табло, выдается световая информация о заданном алгоритме обучения и операциях обучения, которые необходимо выполнить в процессе отработки данного алгоритма. При правильном выполнении соответствующей операции обучения поступает сигнал с блока управления, с помощью которого производится переключение блока контроля и управления последовательностью операций обучения.
По командам, поступающим с выхода этого блока, происходят соответствующие переключения в блоке имитации двигателя машины, отображения информации и в блоке моделирования землеройной машины. Последовательное переключение блока
контроля и управления последовательностью операций обучения при правильном выполнении операций обучения происходит до момента окончания заданного алгоритма
обучения. При этом в соответствии с заданным алгоритмом обучения происходит пере- ключение элементов указанных выше блоков.
В случае попытки неправильного выполнения операции обучения либо при неправильной последовательности выполнения операций поступают сигналы с выходов блока задания алгоритмов обучения, блока управления и блока контроля и управ5 ления последовательностью операций обучения на входы блока управления сигнализацией ошибки.
При этом сигнал с выхода блока управления сигнализацией ошибки включает уст0 ройство сигнализации ошибки и блокирует работу блока контроля и управления последовательностью операцией обучения.
При возврате неправильно переключенного элемента управления в исходное
5 положение этот сигнал прекращается, прекращается сигнализация ошибки и снимается блокировка, запрещающая дальнейшую отработку операций заданного алгоритма обучения.
0Обладая большими преимуществами,
устройство-прототип обладает и существенными недостатками, заключающимися в том, что, давая информацию об ошибке и блокируя неправильное выполнение опера5 ций, устройство-протэтип не дает возможности должным образом контролировать качество обучения, так как в нем отсутствует контроль длительности выполнения алгоритма обучения и контроль количества оши0 бок.
Цель изобретения - устранение указанного недостатка, а именно улучшение контроля качества обучения.
Поставленная цель достигается тем, что
5 тренажер водителя землеройной машины, содержащий блок управления, выход которого соединен с первыми входами блоков имитации двигателя машины, отображения информации, моделирования землеройной
0 машины, блок задания алгоритмов обучения, выход которого соединен с вторыми входами блоков имитации двигателя машины, отображения информации, моделирования землеройной машины, блок контроля и
5 управления последовательностью операций обучения, блок управления сигнализацией ошибки, устройство сигнализации ошибки, где выход блока управления соединен с первыми входами блока контроля и управления последовательностью операций обучения и блока управления сигнализацией ошибки, выход блока контроля и управления последовательностью операцией обучения соединен с третьими входами блока управления сигнализацией ошибки, блока имитации двигателя машины, блока отображения информации, блока моделирования землеройной машины, выход управления сигнализацией ошибки соединен с входом устройства сигнализации и третьим входом блока контроля и управления последовательностью операций обучения, имеет блок контроля длительности выполнения алгоритма обучения и блок контроля количества ошибог, причем вход блока контроля длительности выполнения алгоритма обучения связан с выходом блока задания алгоритмов обучения, вход блока контроля количества ошибок связан с выходом блока управления сигнализацией ошибки, выход блока контроля длительности выполнения алгоритма обучения связан с четвертым входом блока контроля и управления последовательностью операций обучения и четвертым входом блока отображения информации, а выход блока контроля количества ошибок связан с пятым входом блока контроля и управления последовательностью операций обучения и пятым входом блока отображения информации
Предлагаемый тренажер (фиг. 1) состоит из блока 1 управления, блока 2 имитации двигателя машины, блока 3 отображения информации, блока 4 моделирования землеройной машины, блока 5 задания алгоритма обучения, блока 6 контроля и управления последовательностью операций обучения, блока 7 управления сигнализацией ошибки, устройства 8 сигнализации ошибки, блока 9 длительности выполнения алгоритма обучения, блока 10 контроля количества ошибок.
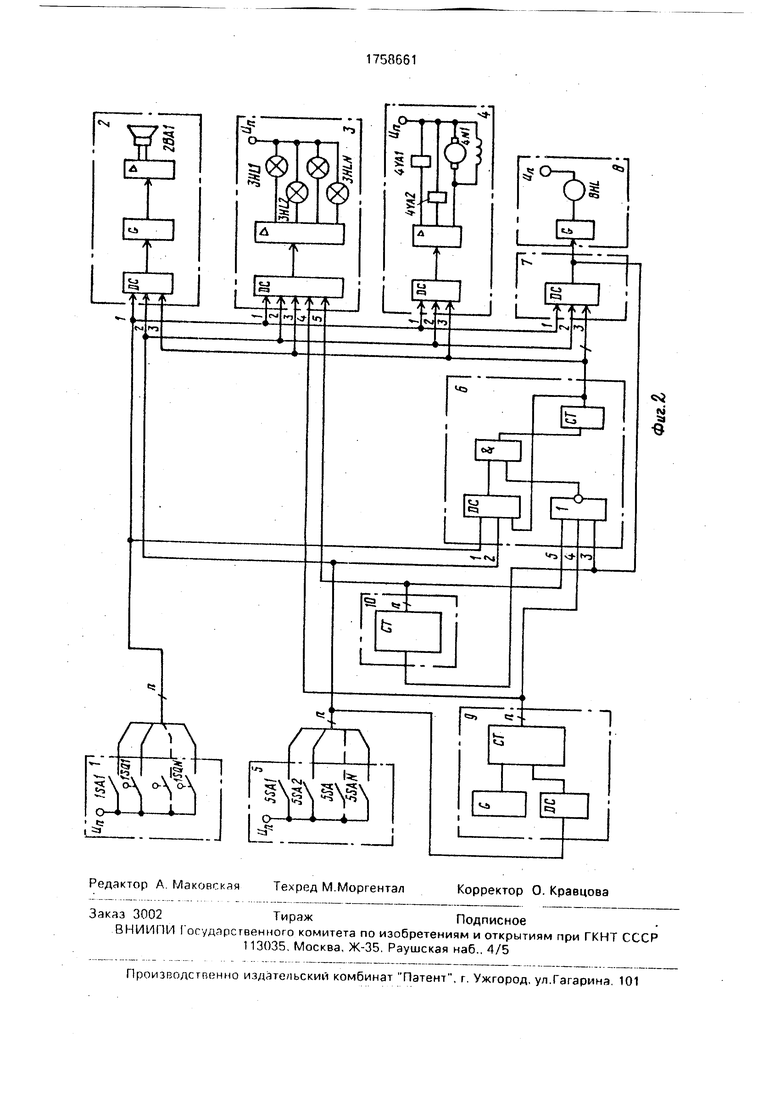
Блок 1 (фиг. 2)управления представляет собой набор путевых выключателей, переключателей, реле и других элементов, фиксирующих положения различных устройств тренажера. Такими устройствами являются рычаги управления, имитирующие рычаги управления машины, переключатели, имитирующие переключатели панели приборов машины и т.п.
Блок 2 имитации двигателя машины представляет собой устройство, имитирующее шум при работе запущенного двигателя в различных режимах. Этот блок может быть выполнен в виде генератора низкой частоты с динамической головкой громкоговорителя на выходе.
Блок 3 отображения информации представляет собой информационное табло со световыми транспарантами с надписями, определяющими требуемые операции обу- 5 чения, и сигнальными лампами и табло алгоритмов обучения со световыми транспарантами заданных алгоритмов обучения.
Блок 4 моделирования землеройной ма- 10 шины представляет собой набор действующих моделей рабочих органов, выполненных в уменьшенном масштабе
В состав блока 4 моделирования землеройной машины входят приводы действую- 15 щих моделей.
Блок 5 задания алгоритма обучения представляет собой набор переключателей для выбора необходимого алгоритма обучения
0Блок 6 контроля и управления последовательное гью операций представляет собой последовательное устройство, выполненное, например, в виде дешифратора, логической схемы И, логической схемы 5 ИЛИ-НЕ и счетного устройства.
Блок 7 управления сигнализацией ошибки представляет собой дешифратор, первый, второй и третий входы которого являются соответственно первым, вторым и 0 третьим входами блока управления сигнализацией ошибки.
Устройство 8 сигнализации ошибки представляет собой светосигнальное устройство, например светосигнальное устрой- 5 ство мигающего света.
Блок 9 контроля длительности выполнения алгоритма обучения представляет собой счетчик времени задания значения длительности, запуск в работу которого про- 0 изводится по команде блока задания алгоритма обучения.
Блок 10 контроля количества ошибок представляет собой счетчик с выходным устройством, срабатывающим при наборе за- 5 данного количества ошибок.
Входы первый, второй и третий блока 2 имитации двигателя машины, блока 3 отображения информации и блока 4 моделирования землеройной машины соединены 0 соответственно с выходом блока 1 управления, выходом блока 5 задания алгоритма обучения и выходом блока 6 контроля и управления последовательностью операций обучения. Первьй вход блока 6 контроля и 5 управления последовательностью операций обучения соединен с выходом блока 1 управления, вход 2 блока б контропя и управления последовательностью операций обучения - с входом блока 9 контр тля длительности зыполнения алгоритм,-
и выходом блока 5 задания алгоритма обучения. Выход блока 7 управления сигнализацией ошибки соединен с третьим входом блока 6 контроля и управления последовательностью операций обучения и входом блока 10 контроля количества ошибок, четвертый и третий входы последнего соединены с четвертым и пятым входами блока 3 отображения информации, а четвертый вход еще и с выходом блока 9 контроля длительности выполнения алгоритма обучения, пятый вход- с выходом блока 10 контроля количества ошибок. Вход блока 10 контроля количества ошибок соединен с выходом блока б контроля и управления последовательностью операций.
Блок-схема конкретного выполнения предлагаемого тренажера (фиг. 2) содержит блок 1 управления, выполненный в виде набора выключателей и микропереключателей, блок 2 имитации двигателя в виде трехвходового дешифратора, генератора низкой частоты, усилителя и динамической головки громкоговорителя, блок 3 отображения информации - в виде сигнальных ламп, усилителей и пятивходового дешифратора, блок 4 моделирования землеройной машины - в виде трехвходового дешифратора, усилителей, электродвигателей и элект- рогидрозолотников и блок 5 задания алгоритма обучения, выполненный в виде набора переключателей.
Кроме того, на этой блок-схеме приведен блок 6 контроля и управления последо- вательностью операций обучения, выполненный в виде дешифратора, логической схемы ИЛИ-НЕ и счетного устройства с логической схемой И, причем первый и второй входы дешифратора являются соответственно первым и вторым входами блока контроля и управления последовательностью операций обучения, третий вход дешифратора соединен с первым входом элемента И счетного блока, второй вход последнего соединен с выходом элемента ИЛИ-НЕ, первый, второй и третий входы которого являются соответственно пятым, четвертым и третьим входами блока контроля и управления последовательностью операций обучения.
На блок-схеме (фиг. 2) приведен блок 7 управления сигнализацией ошибки, выполненный в виде дешифратора, первый, второй и третий входы которого служат соответственно входами блока 7 управления сигнализацией ошибки, и устройство 8 сигнализации ошибки в виде генератора низкой частоты и сигнальной лампы.
Кроме того, на блок-схеме (фиг. 2) приведен блок 9 контроля длительности выполнения упражнения, выполненный в виде дешифратора, генератора временных импульсов и счетчика. Вход дешифратора является входом самого блока и связан с блоком 5
задания алгоритма обучения, а выход счетчика является выходом этого блока и связан с входом четвертым блока 3 отображения информации и входом четвертым блока 6 контроля и управления последовательностью
0 операций обучения.
Блок 10 контроля количества ошибок представляет собой счетчик, вход которого связан с выходом блока 7 управления сигнализацией ошибки, а выход этого счетчика
5 связан с пятым входом блока 3 отображения информации и пятым входом блока 6 контроля и управления последовательностью операций обучения.
Работа предлагаемого тренажера про0 исходит следующим образом.
В блоке 5 задания алгоритма обучения включают переключатель например, 5SA2, задающий выбранный алгоритм обучения. Если органы управления блока 1 управле5 ния находятся в положении, которое соответствует началу отработки этого заданного алгоритма обучения, то комбинация сигналов поступает от переключателя 5SA2 и от органов управления блока 1 управления на
0 входы дешифратора блока 6 контроля и управления последовательностью операций. Одновременно включается блок 9 контроля длительности выполнения алгоритма обучения, в котором задается длительность вре5 мени, соответствующая заданному для данного алгоритма обучения значению, и начинается отработка этого времени. Сигнал с выхода дешифратора блока 6 контроля и управления последовательностью опера0 ций обучения поступает на первый вход схемы И, на втором входе которой присутствует разрешающий сигнал. С выхода этой схемы И сигнал выдается на вход счетного устройства, которое переходит по
5 этому сигналу в следующее состояние.
Сигнал этого состояния счетного устройства попадает на третий вход блока 3 отображения информации. Этот сигнал в комбинации с сигналами, поступающими на
0 первый и второй входы указанного блока соответственно с блока 1 управления и блока 3 задания алгоритма обучения, создает на выходе дешифратора блока 3 отображения информации сигнал, включающий соот5 ветствующие устройства (например, 3HL1, 3HL2), сигнализирующие о необходимости выполнения определенных операций обучения.
При правильном выполнении операций обучения происходит последовательное переключение элементов сигнализации и моделирования. При этом блок 9 контроля длительности выполнения алгоритма обучения будет набирать время, соответствующее затраченному на выполнение указанных операций. Если без ошиоок будет выполнен весь алгоритм обучения и при этом в блоке 9 контроля длительности выполнения алгоритма обучения не будет достигнуто значе- ния времени, заданного для этого алгоритма обучения, счетчик этого блока будет сброшен и запустится при новом задании алгоритма обучения. Если же до окончания выполнения алгоритма обучения блок 9 контроля длительности выполнения алгоритма обучения отсчитает заданное значение, сигнал с выхода этого блока поступит на схему И Л И-НЕ блока 6 контроля и управления последовательностью эперз- ции, а сигнал с выхода схемы ИЛИ-НЕ запретит дальнейшую отработку алгоритма обучения. Одновременно на блок 3 отображения информации (вход четвертый и третий) поступят сигналы на индикацию выхода за допустимый предел времени выполнения алгоритма обучения и сигналы о месте остановки выполнения упражнения. Это дает возможность контролировать качество усвоения и быстроту реакции при выполнении алгоритма обучения и дать оценку этому выполнению.
В случае неправильного выполнения операции обучения (ошибочный выбор органа управления и т.п.) комбинация сигналов, поступающих на первый, второй и третий входы дешифратора блока 7 управлений сигнализацией ошибки, вызывает на выходе этого блока сигнал, запускающий устройство 8 сигнализации ошибки, и в блоке 10 контроля количества ошибок производится отсчет одной ошибки.
Одновременно этот сигнал поступает на схему ИЛИ-НЕ (третий вход) блока 6 контроля и управления последовательностью операций, а выход этой схемы запирает схемы И, связанную с входом счетного устройства этого блока.
Это устройство не может переключаться до тех пор, пока неправильное переключение не будет устранено.
Однако если будет сделано количество ошибок, больше заданного на блоке 10 контроля количества ошибок, даже после ликвидации неправильного положения на входе 5 элемента ИЛИ-НЁ блока 6 контроля и управления последовательностью операций остается сигнал, запрещающий дальнейшую работу этого блока. Одновременно этот сигнал возбуждает элементы сигнализации в блоке 3 отображения информации.
Элементы сигнализации дают информацию о превышении заданного числа ошибок и о месте остановки выполнения алгоритма обучения.
5Это дает возможность контролировать
качество обучения и приобретения навыков быстрого и правильного выполнения упражнения. Использопание заявляемого решения приводит к улучшению контроля 10 качества обучения, а вместе с этим сокращает общее время усвоения и выработку автоматических навыков у обучаемого.
Базовым обьектом служит тренажер землеройной машины, принятый за прото- 15 тип.
Стоимость такого тренажоря в соответствие с выполненным для него расчетом экономической эффективности составляет 10350 руб. Среднее время обучения одного 0 обучаемого на таком тренажере составляет 36 ч. На основании опыта проведения испытаний тренажеров землеройных машин использование устройства тренажера по данной заявке позволит сократить указан- 5 ное время на 3-4%.
Таким образои, при одинаковом количестве обучаемых для их обучения потребуется на 3-4% меньше общего количества тренажеров. Считая, что общее количество 0 тренажеров землеройных машин составляет 350-400 шт., без учета стоимости базового объекта экономический эффект от использования изобретения по данной за- яеке составит 110-150 тыс.руб. 5Предполагая, увеличение стоимости
тренажера по данной заявке составит 50- 60 руб., окончательная сум,мг экономического эффекта составит 92500 126000 руб.
0Формула изобретения
Тренажер водителя землеройной машины по авт.св. N° 1578731, отличдющ и й- с я тем, что, с целью улучшения эффективности контроля обучения, он снабжен бло5 ком контроля длительности р.ыполнения алгоритма обучения и блоком количества ошибок, при этом выход блока управления сигнализацией ошибки ПОДКЛЮЧРЧ к входу блока количества ошибок, а выхлд блока
0 задания алгоритма обучения подключен к входу блока контроля длительности выполнения алгоритма обучения, выход которого соединен с четвертыми входами бпока отображения информации и блока от роля и
5 управления последовательноегыо операций, а выход блока управления с.и нчлиза- цией ошибок соединен с f-ходами блока отображения информации и Плока контроля и управление посл.юп п льно- стью операций.
Редактор А Маковгкая Техред М.Моргентал
Корректор О. Кравцова
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер водителя землеройной машины | 1988 |
|
SU1578731A1 |
| Тренажер водителя землеройной машины | 1981 |
|
SU982066A1 |
| ТРЕНАЖЕР ОПЕРАТОРА | 1991 |
|
RU2065622C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| Тренажер оператора систем передачи информации с обратной связью | 1982 |
|
SU1068972A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Адаптивный тренажер оператора систем управления | 1978 |
|
SU728154A1 |
| Исполнительный механизм тренажера оператора транспортного средства | 1981 |
|
SU980122A1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| КОМПЬЮТЕРНЫЙ ТРЕНАЖЕР НАЧАЛЬНОЙ ПОДГОТОВКИ МЕХАНИКА-ВОДИТЕЛЯ | 2001 |
|
RU2190256C1 |
Сущность изобретения тренажер содержит блок 1 управления, блок 2 имитации двигателя, блок 3 отображения информации, блок 4 моделирования землеройной машины, блок 5 задания алгоритма обучения, блок 6 контроля и управления последовательностью операций обучения, блок 7 управления сигнализацией ошибок, устройство 8 сигнализации ошибки, блок 9 контроля длительности выполнения алгоритма обучения, блок 16 контроля количества ошибок 2 ил.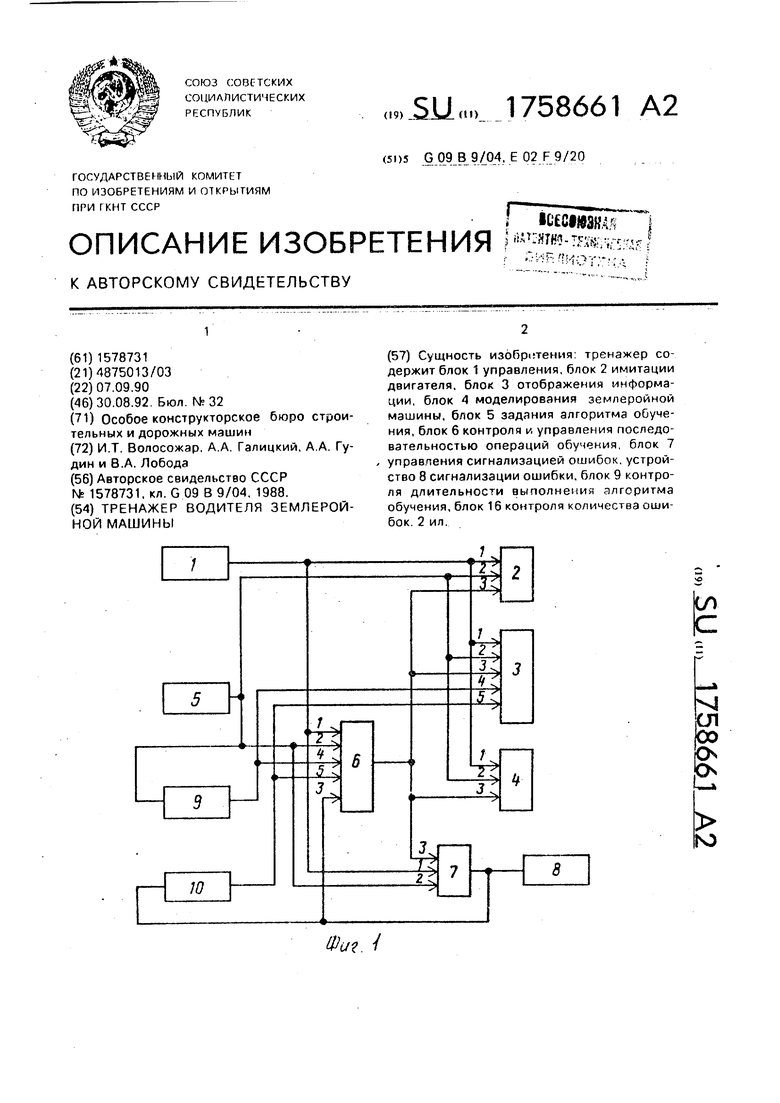
Заказ 3002ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35. Раушская иаб.. 4/5
| Тренажер водителя землеройной машины | 1988 |
|
SU1578731A1 |
| кл | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
