Изобретение относится к злектро- тсхчикр, в члстности к автоматизированным -электроприводам, и может быть исгтольяовяно Р системах автоматического регулирования быстродействующих тиристорных электроприводов с малыми ошибками регулирования, не имеюпщх датчиков обратной связи по скорости.
Целью изобретения является повышение точности регулирования.
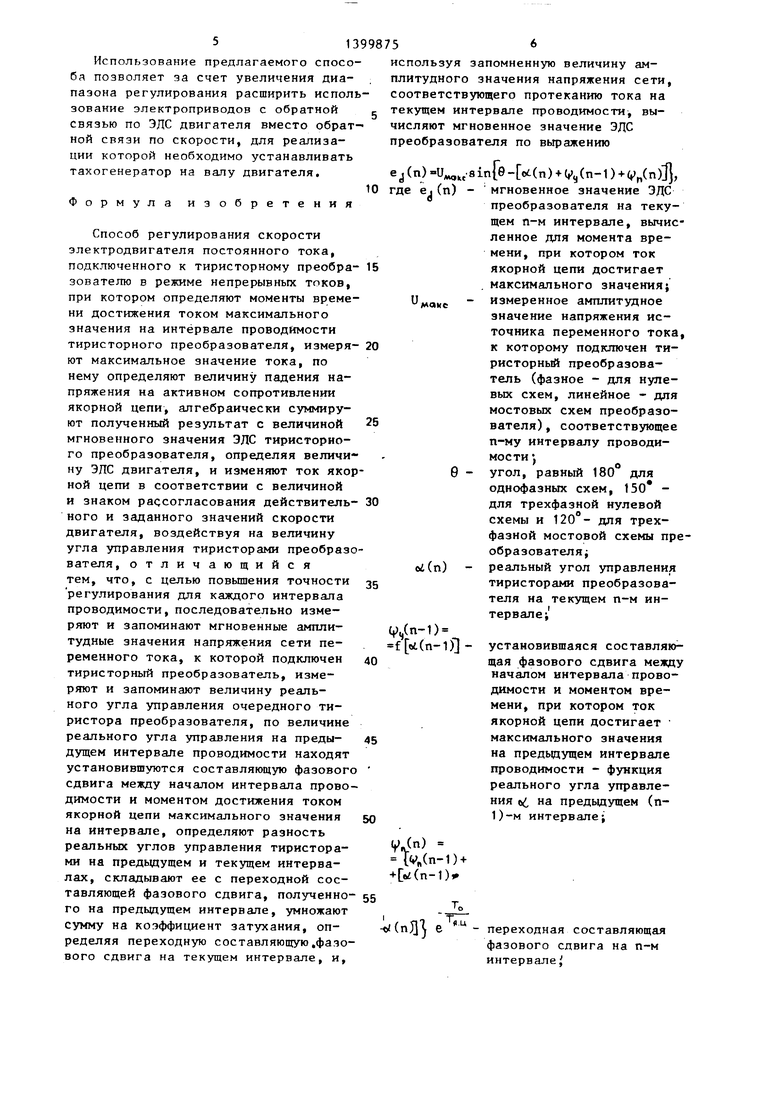
На фиг, 1 изображена схема электропривода, реализующего предлагаемый способ; на фиг. 2 - диаграммы, поясняющие работу электропривода.
Электропривод содержит последовательно соединенные регуляторы 1 и 2 ЭДС и тока соответственно, включенные на входе системы 3 управления тиристорного преобразователя 4. К выходу тиристорного поеобразователя 4 подключены последовательно соединенные якорь двигателя 5 и токоный шунт 6. Параллельно токовому шунту 6 подключен датчик 7 максимального тока на интервапе проводимости преобразователя, выход которого соединен с первым входом первого блока 8 умножения, первым входом блока 9 управления и входом обратной связи регулятора 2 тока. Первый выход системы 3 управления соединен с входом первого блока 10 памяти, первым входом первого блока 11 вычитания, входом функционального преобразователя 12 и с первым входом второго блока 13 вычитания. Выход функционального преобразователя 12 через второй блок 14 памяти соединен с вторым входом второго блока 13 вычитания, а выход первого блока 10 памяти соединен с вторым входом первого блока 11 йычитания. Выход блока 11 вычитания подключен к первому входу блока 15 сложения, выход которого через второй блок 16 умножения соединен с третьим входом второго блока 13 вычитания. Выход блока 16 умножения соединен также через третий блок 17 памяти с вторым входом второго блока 16 умножения. Выход второго блока 13 вычитания через блок 18 нычигления функции синуса и третий блок 19 умножения подключен к первому входу третьего блока 20 вычитания, к второму входу которого подключен первого блока Я умножения. Ныхпд rpeTTievo блока 20 вычитания соединен с входом обратной связи регулятора 1 ЭДС двигателя 5, вход задания которого через четвертый блок 21 умножения подключен к блоку 22 задания скорости. Блок 23 измерения максимального значения напряжения своими входами подключен к сети, питающей тиристорный преобразователь, а выходом - к четвертому блоку 24 памяти. Выход последнего соединен с вторым входом третьего блока 19 умножения. Блок 25 памяти постоянных величин первым, вторым и третьим
выходами соединен с вторыми входами соответственно первого 8, второго 16 и четвертого 21 блоков умножения, а четвертый выход блока 25 соединен с четвертым входом второго блока 13
вычитания.
Второй выход системы 3 управления тиристорного преобразователя 4 подключен к второму входу блока 9 управления. Выходы блока 9 управления соединены с входами управления регуляторов 1 и 2, блока 15 сложения, блоков 11, 13 и 20 вычитания, блоков 10, 14, 17, 24 и 25 памяти, блоков 8, 16, 19 и 21 умножения, датчика 7, блока
23 измерения максимального значения напряжения, функционального преобразователя 12, блока 18 вычисления функции синуса, блока 22 задания.
Электропривод работает следующим образом.
В исходном положении на выходе регулятора 2 тока установлен код угла об(п) управления тиристорами, который поступает на вход блока 3 им- пульсно-фазового управления, где происходит отсчет временных интервалов, начинающихся с моментов естественной коммутации соответствующих тИристоров И оканчивающихся моментами подачи импульсов управления на эти тиристоры. Величина этих временных интервалов, соответствующая реальным углам управления, измеряется в системе 3 управления. Открывание очередного тиристора происходит сразу же по окончании вычислений регулятором 2 тока угла управления, если последний больше текущего реального угла, и в момент равенства измеренного и заданно- го углов управления, если текущий угол в момент окончания вычислений в регуляторе 2 тока меньше вычисленного.
15
Код измеренного реального угла управления, с которым произошло открывание в рассматриваемом периоде очередного тиристора, поступает на входы блока 11 вычитания и функционального преобразователя 12, а также запоминается на один период работы преобразователя 4 в блоке 10 памяти.
На фиг. 2 представлены зависимости ю установившейся составляющей фазового сдвига Vij f(ei ) при изменении угла управления в диапазоне от 20 до 160 . Зависимость А определяет установившуюся составляющую фазового сдвига ф,. в функции угла управления oi дпя величины постоянной времен якорной цепи Т 0,1 с, а зависимость Б соответствует величине постоянной времени Т, 0,002 с. Функциональный преобразователь 12 преобразует величину кода утла управления oL в величину установившейся составляющей фазового сдвига в соответствии с занесенной в преобразователь зависимостью (Уц (п-1) (n-1).
В блоке 11 из кода угла управления et(n) очередного тиристора вычитается код, поступающий из блока 10 памяти, соответствующий углу управле- зо циональный ЭДС двигателя, постув результате операции вычитания блоке 13, нахолится код, пропорци напьньп ЭЛС тиристорного преобра теля, в случае питания последнег сети с неизменным напряжением, дл момента времени, при котором ток достигает максимального на текуще интервале проводимости значения. блоке 19 умножения происходит кор ция полученной на выходе блока 18 личины в соответствии с измеренны блоке 23 и запомненным в блоке 24 симальным значением напряжения пи щей сети, определяющим ток на тек щем интервале проводимости преобр вателя. Выходной код с выхода бло 19, соответствующий реальной вели не ЭДС тиристорного преобразовате в момент максимума тока на текуще тервале проводимости, поступает н вход блока 20, где из него вычита ся код, пропорциональный падению пряжения в якорной цепи, полученн 25 в блоке 8 путем перемножения вели сопротивления якорной цепи и макс мального на текущем интервале ток На выходе блока 20 устанавливаетс код сигнала обратной связи, пропо
20
ния oi(n-l) предыдущего интервала проводимости. Сложением в блоке 15 вычисленной разности с кодом, поступающим из блока 17 памяти, и последующим умножением в блоке 16 полученной суммы на постоянный множитель, определяемый динамическими параметрами электропривода и поступающий из блока 25 памяти постоянных величин, вычисляется переходная составляющая фазового сдвига 9 (п) на текущем такте работы устройства. Код переходной составляющей фазового сдвига „(п) запоминается в блоке 17 памяти для вычислений следующего такта и поступает в блок 13 вычитания. В последнем из угла б , равного 180 для однофазных схем, 150° - для трехфазной нулевой схемы и 120° - для трехфазной мостовой схемы преобразователя, вычитаются угол управления рб(п) и переходная составляющая фазового сдвига ф„(п) для текущего интервала проводимости тиристоров и установившаяся составляющая фазового сдвига Vu(n-l) для предыдущего интервала проводимости.
В блоке 18 вычисления функции синуса по величине угла, полученного
циональный ЭДС двигателя, постув результате операции вычитания в блоке 13, нахолится код, пропорцио- напьньп ЭЛС тиристорного преобразователя, в случае питания последнего от сети с неизменным напряжением, для момента времени, при котором ток достигает максимального на текущем интервале проводимости значения. В блоке 19 умножения происходит коррекция полученной на выходе блока 18 величины в соответствии с измеренным в блоке 23 и запомненным в блоке 24 максимальным значением напряжения питающей сети, определяющим ток на текущем интервале проводимости преобразователя. Выходной код с выхода блока 19, соответствующий реальной величм- не ЭДС тиристорного преобразователя в момент максимума тока на текущем интервале проводимости, поступает на вход блока 20, где из него вычитается код, пропорциональный падению напряжения в якорной цепи, полученный в блоке 8 путем перемножения величин сопротивления якорной цепи и максимального на текущем интервале тока. На выходе блока 20 устанавливается код сигнала обратной связи, пропор
5
0
5
0
5
пающий на инверсный вход (вход об- . ратной связи) регулятора 1 ЭДС двигателя 5. Задание из блока 22 на скорость двигателя 5, умноженное в блоке 21 на постоянный коэффициент пропорциональности между скоростью и ЭДС двигателя, характеризующий конструктивные параметры двигателя, поступает на прямой вход (вход вада- ния) регулятора ЭДС двигателя. Последний рассчитывает величину задания на ток. Регулятор 2 тока вычисляет угол управления (п+1) тиристорами для очередного такта работы преобразователя исходя из рассогласования сигналов задания на ток, который поступает с. выхода регулятора 1 ЭДС двигателя, и сигнала обратной связи с выхода датчика 7 максимального на интервале проводимости значения тока для текущего такта работы устройства. Управление работой устройства осуществляется сигналами, поступающими из блока 9 управления. В свою очередь, синхронизация работы блока 9 происходит управляющими i-tM пуль сами, приходящими из блока 3 импульсно-фазового управления и датчика 7 максимального тока.
Использование предлагаемого способа позволяет за счет увеличения диапазона регулирования расширить использование электроприводов с обратной связью по ЭДС двигателя вместо обратной связи по скорости, для реализации которой необходимо устанавливать тахогенератор на валу двигателя.
Формула изобретения
Способ регулирования скорости электродвигателя постоянного тока, подключенного к тиристорному преобра зователю в режиме непрерывных токов, при котором определяют моменты времени достижения током максимального значения на интервале проводимости тиристорного преобразователя, измеря ют максимальное значение тока, по нему определяют величину падения напряжения на активном сопротивлении якорной цепи, алгебраически суммируют полученный результат с величиной мгновенного значения ЭДС тиристорио- го преобразователя, определяя величину ЭДС двигателя, и изменяют ток яконой цепи в соответствии с величиной и знаком рассогласования действитель ного и заданного значений скорости двигателя, воздействуя на величину угла управления тиристорами преобразвателя, отличающийся тем, что, с целью повышения точности регулирования для каждого интервала проводимости, последовательно измеряют и запоминают мгновенные амплитудные значения напряжения сети переменного тока, к которой подключен тиристорный преобразователь, измеряют и запоминают величину реального угла управления очередного тиристора преобразователя, по величине реального угла управления на преды- дущем интервале проводимости находят установившуются составляющую фазовог сдвига между началом интервала проводимости и моментом достижения током якорной цепи максимального значения на интервале, определяют разность реальных углов управления тиристорами на предьщущем и текущем интервалах, складывают ее с переходной составляющей фазового сдвига, полученно го на предьщущем интервале, умножают сумму на коэффициент затухания, оп- ределяя переходную составляющую .фазового сдвига на текущем интервале, и.
g
используя запомненную величину амплитудного значения напряжения сети, соответствующего протеканию тока на текущем интервале проводимости, вычисляют мгновенное значение ЭДС преобразователя по вьфажению
е j (п) и,..8 (n) -VyCn-1)(n)|,
0 где е 1 (п) маке
0 1520 25 30oi(n) 35 40 45 50 55 -« (п)
мгновенное значение ЭДС преобразователя на текущем п-м интервале, вычисленное для момента времени, при котором ток якорной цепи достигает максимального значения; измеренное амплитудное значение напряжения источника переменного тока, к которому подключен тиристорный преобразователь (фазное - для нулевых схем, линейное - для мостовых схем преобразователя) , соответствующее п-му интервалу проводимости ,
угол, равный 180 для однофазных схем, 150 - для трехфазной нулевой схемы и 120°- для трехфазной мостовой схемы преобразователя;реальный угол управления тиристорами преобразователя на текущем п-м интервал ej
ф,,(п-1)
Гв(п-1)- установившаяся составляющая фазового сдвига между началом интервала проводимости и моментом времени, при котором ток якорной цепи достигает максимального значения на предьщущем интервале проводимости - функция реального угла управления (х на предьщущем (п- 1)-м интервале;
V (п) К(п-1) + (n-Di.
я.ц
переходная составляющая фазового сдвига на п-м интервале
У, грег
36
J
32
30
28262 2220
О 20 0 60 80 ЮО Г20 fffo а.град Фи 2
9
Составитель М.Кряхтуйова Редактор Е.Копча Техред М.ХоданичКорректор Н.Король
Заказ 2676/55Тираж 583Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399881A1 |
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода | 1989 |
|
SU1644345A1 |
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода постоянного тока | 1984 |
|
SU1277333A1 |
| Способ управления тиристорным преобразователем | 1987 |
|
SU1539934A1 |
| Способ регулирования тока адаптивного электропривода | 1986 |
|
SU1372571A1 |
| Устройство для регулирования скорости электродвигателя | 1980 |
|
SU964936A1 |
| Способ управления тиристорным электроприводом | 1987 |
|
SU1457139A1 |
| Способ регулирования тока вентильногоэлЕКТРОпРиВОдА пОСТОяННОгО ТОКАи уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU801215A1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| Способ управления тиристорным электроприводом постоянного тока и устройство для его осуществления | 1982 |
|
SU1061227A1 |

Изобретение относится к электротехнике и может быть использовано для электроприводов, не имеюярпс датчиков , обратной связи по скорости. Цель1Ь изобретения является повьдпенне точности регулирования. Согласно данному. способу измеряют блоком 23 и запо-д минают в блоке 24 мгновенные в«плитуд- ные значения напряжения сети переменного тока. Измеряют реальный угол управления тиристорного преобрвзова- теля 4 и вычисляют мгновенные значения электродвижуией силы преобразователя. Вычитая из последних падения напряжения в активном сопротивлении якорной цепи, определяют ЭДС двигателя. 2 ил. 9 $ (Л с 9 ;о х х ч :п CPue.l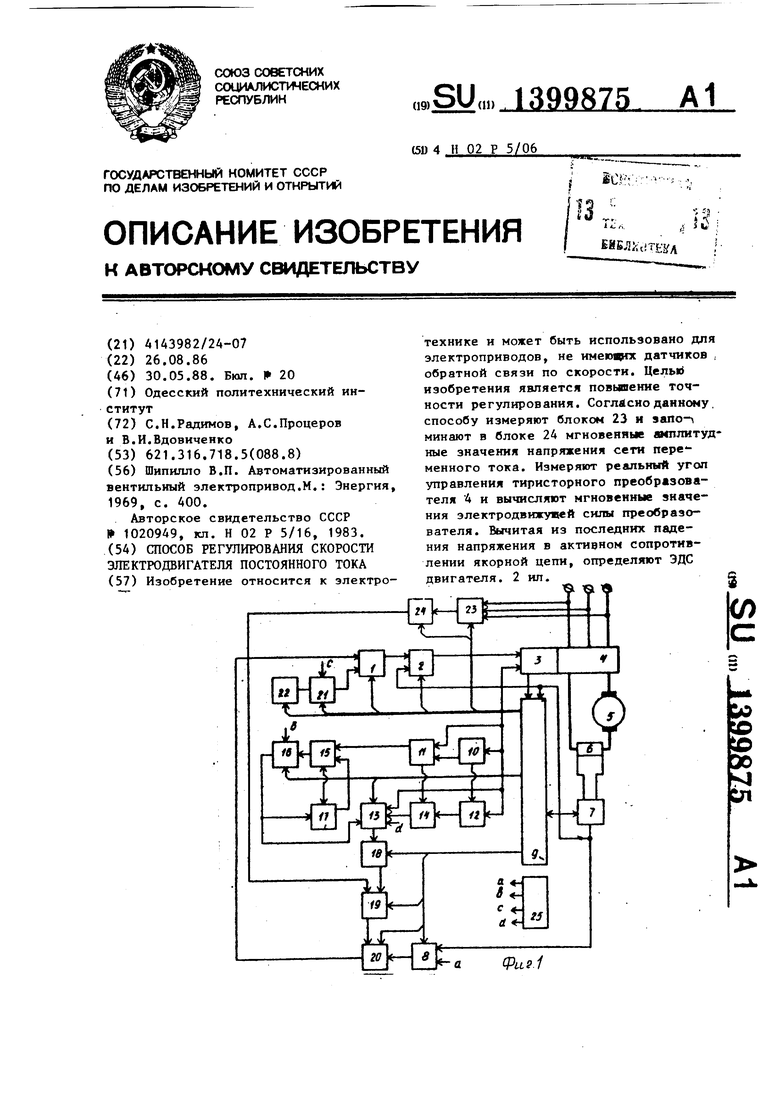
| Шипилло В.П | |||
| Автоматизированный вентильный электропривод.М.: Энергия, 1969, с | |||
| Способ фотографической записи звуковых колебаний | 1922 |
|
SU400A1 |
| Способ регулирования частоты вращения электродвигателя постоянного тока с вентильным преобразователем | 1982 |
|
SU1020949A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
