Од
Од от
М СО 00
Ф1П.{
Изобретение относится к электротехнике и может быть использовано в тиристорных асинхронных электроприводах переменного тока грузоподъемных механизмов с широким диапазоном регулирования частоты вращения.
Целью изобретения является повышение энергетических и динамических показателей за счет уменьшения тормозных моментов при переходе с одной частоты вращения на другую и повышение перегрузочной способности.
На фиг.1 показана блок-схема частотно-регулируемого электропривода грузоподъемного механизма; на фиг.2
временные диаграммы поясняющие формирование управляющего входного сигнала системы импульсно-фазового управления.
Частотно-регулируемый электропривод грузоподъемного механизма содержит асинхронный электродвигатель 1, связанный выводами фазных обмоток с выходом преобразователя частоты с непосредственной связью5 составленного из трех групп тиристорных трехфазных мостов 2-4, управляющие цепи которых подключены к выходам формирователей 5-7 управляющих импульсов тиристоров кольцевой сдвигающий регистр 8, выход которого подключен к первым входам формирователей 5-7 управляющих импульсов тиристоров, вторые входы которых соединены с первым, вторым и трет.ьим выходами узла 9 управления и с управляющими цепями соответственно первого, второго и третьего управляемых коммутаторов 10-12, а третьи входы формирователей 5-7 управляющих импульсов тиристоров подключены к выходам первой 13, второй 1А и третьей 15 систем импульсно-фазового управления, п пороговых элементов 16 соединенных входами с выходами ко- мандоаппарата 17, причем выходы k пороговых элементов 16 соединены с входами задающего генератора 18 плавно-изменяемой частоты, а выходы n-k пороговых элементов 16 соединены со входами задающего генератора 19 ступенчато-изменяемой частоты, выход п-го порогового элемента 16 подключен к входу кольцевого сдвигающего регистра 8, выходы задающих генераторов 18 и 19 соединены с входами узла 9 управления и с входами преобразователя 20 частота - напряжение, выход которого подключен к второму
входу второго сумматора 21, датчики 22-24 фазных токов и датчики 25-27 фазных напряжений электродвигателя 1 подключены выходами к входам блока 28 определения фазных ЭДС, выходы которого соединены со входами выпрямителей 29-31 и первыми входами управляемых коммутаторов 10-12 непосредственно и со вторыми входами указанных управляемых коммутаторов через инвертирующие усилители 32-34, выходы выпрямителей 29-31 подключены к входам первого сумматора 35, выходом подсоединенного к первому входу -второго сумматора 21, выход которого соединен с входом пропорционально-интегрального регулятора 36 модуля ЭДС, выход пропорционально-интегрального регулятора 36 модуля ЭДС соединен с первыми входами третьего 37, четвертого 38 и пятого 39 сумматоров, вторые входы которых .подключены к выходам управляемых коммутаторов 10-12, а выходы - к входам систем 13-15 им- пульсно-фазового управления.
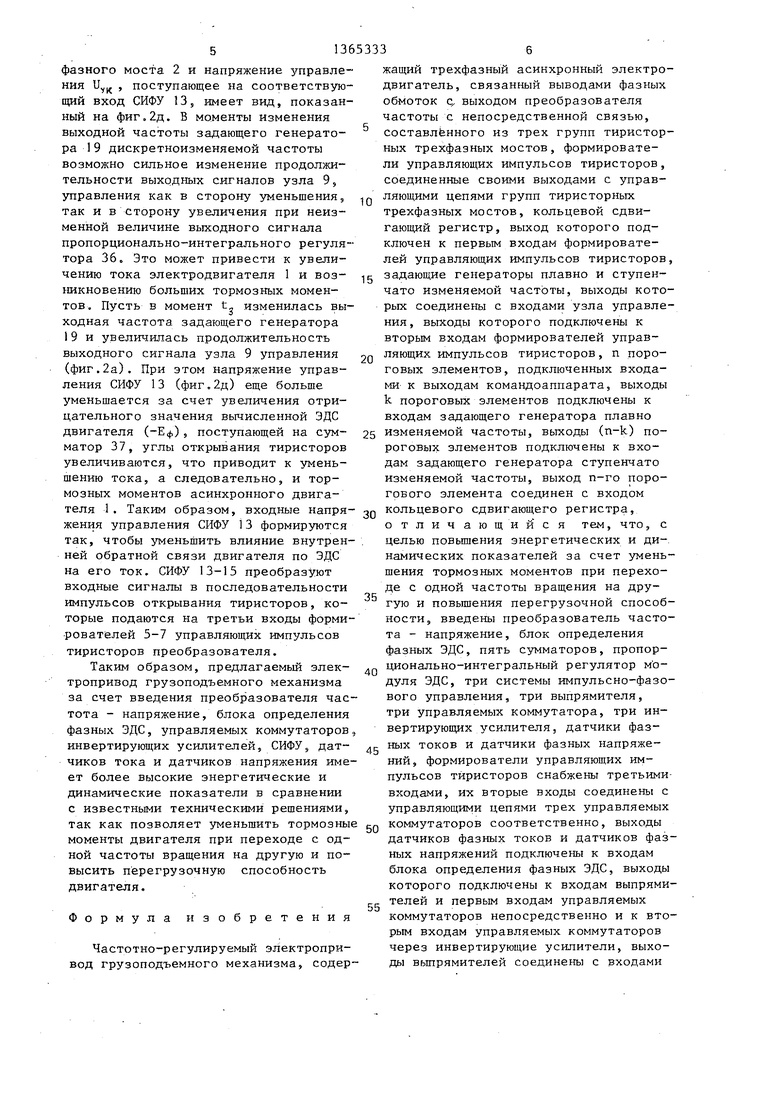
На фиг. 2 показаны: а- выходной
сигнал узла 9 управления; Б- выходной сигнал блока 28 определения фазных ЭДС; 6- выходной сигнал инверти
рующего усилителя 32; г , 3 - U
уя J и УК.
сигналы управления СИФУ 13, Uyper- выходное напряжение пропорционально- интегрального регулятора 36 модуля
5 ЭДС.
Частотно-регулируемый электропривод грузоподъемного механизма работает следующим образомс Электропривод обеспечивает одно0 зонное частотное регулирование частоты вращения асинхронного электродвигателя 1 (вниз от номинального значения) . Номинальная частота вращения электродвигателя достигается при
5 его работе на частоте питающей сети, при этом в каждом тиристорном трехфазном мосте 2-4 включается одна пара встречно-параллельных тиристоров, подключенных к различным фазам питаюQ щей сети. Команда на работу электропривода в указанном режиме (режиме коммутатора) подается при включении п-го порогового элемента 16 при установке командоаппарата 17 в крайнее
gположение. Выборка порядка включения пар встречно-параллельных тиристоров в мостах 2-4 производится в зависимости от комбинаций сигналов на входах формирователей 5-7 управляющих импульсов тиристоров от узла 9 управления и от кольцевого сдвигающего регистра 8, переключаемого при каждом очередном срабатывании (n-l)-ro порогового элемента 16, т.е. при каждом переключении асинхронного электродвигателя I в режим номинальной частоты вращения. Выходные сигналы узла 9 управления определяют продолжительность работы катодных и анодных групп тиристоров в трехфазных тиристорных мостах 2-4 в выпрямительном режиме. Выходные сигналы систем испульсно-фа зового управления (СИФУ) 13-15 в этом режиме блокируются. При установке рукоятки командоаппарата 17 в положения, соответствующие переключениям пороговых элементов 16 от (п-1)-го до (k+l)-ro, выходная частота преобразователя определяется задающим генератором 19 ступенчато-изменяемой частоты. При переводе командоаппарата 17 в положение, соответствующее включению К-го порогового элемента 16, происходит блокировка работы задающего генератора 19 ступенчато-изменяемой частоты и включение задающего генератора 18 плавно-изменяемой частоты.
При изменении выходной частоты преобразователя изменяется и величина напряжения задания ЭДС электродвигателя 1 по закону, обеспечивающему постоянство перегрузочной способности электродвигателя 1. Эту функцию выполняет преобразователь 20 частота- напряжения, обеспечивающий линейную зависимость между его входной частотой и выходнь1м напряжением. Блок 28 определения фазных ЭДС электродвигателя 1 на основании входных сигналов от датчиков 22-24 тока и датчиков 25- 27 напряжения осуществляет вычисление мгновенных значений фазных ЭДС электродвигателя по выражению
Иф
D Т
iфR - L -j--,
1, R
L
где Цф. - фазное напряжение; ток в фазе;
активное сопротивление фазы индуктивность рассеяния фазы.
Выпрямители 29-31 и сумматор 35 приближенно вычисляют модуль ЭДС электродвигателя 1 как результат шес тиимпульсного выпрямления мгновенных значений фазных ЭДС электродвигателя 1 .
10
15
653334
На сумматоре 21 осуществляется отрицательная обратная связь по модулю ЭДС двигателя 1, которая обеспечивает стабилизацию величины модуля ЭДС двигателя. Рассогласование с выхода сумматора 2 поступает на вход пропорционально-интегрального регулятора модуля ЭДС 36. Выходной сигнал пропорционально-интегрального регулятора 36 изменяется так, чтобы поддержать постоянным модуль ЭДС двигателя I, что обеспечивает поддержание постоянства потока асинхронного двигателя 1 в статических режимах. Двух- полярные входные напряжения управления СИФУ 13-15, определяЕОЩие углы открывания тиристоров преобразователя, формируются на сумматорах 37-39 как суммы выходного напряжения пропорционально-интегрального регулятора 36 и сигналов, пропорциональных фазным ЭДС двигателя 1. Временные диаграммы (фиг.2) поясняют принцип формирования управляющего входного сигнала СИФУ одной из фаз преобразователя. Соответствующий выходной сигнал узла 9 управления (фиг.2а), поступающий на вход формирователя 5 управляющих импульсов тиристоров, единицей разрещает работу катодной, а
20
25
30
5
нулем - работу анодной группы тиристоров трехфазного моста 2 данной выходной фазы преобразователя. Этот же.сигнал поступает на вход управления соответствующего коммутатора 10. При нулевом значении сигнала управления коммутатором 10 на вход сумматора 37 подается вычисленная мгновен- 0 ная фазная ЭДС двигателя е ф, а при единичном значении этого сигнала - величина (Е ), противоположная ей по знаку и полученная на выходе инвертирующего усилителя 32, Пусть в момент времени t, дается разрешение
5
0
5
на работу анодной группы тиристоров трехфазного моста 2, При этом напряжение , предназначенное для управления СИФУ 13, имеет вид, изображенный на фиг.2г (здесь же показано выходное -напряжение U -jptr пропорционально-интегрального регулятора модуля ЭДС 36), К концу интервала проводимости анодной группы U а уменьшается, углы открывания тиристоров увеличиваются, что обеспечивает улучшение работы привода в инверторном режиме. В момент tj дается разрешение на работу катодной группы тиристоров трехфазного моста 2 и напряжение управления и , поступающее на соответствующий вход СИФУ 13, имеет вид, показанный на фиг.2д. В моменты изменения выходной частоты задающего генератора 1 9 дискретноизменяемой частоты возможно сильное изменение продолжительности выходных сигналов узла 9, управления как в сторону уменьшения, так и в сторону увеличения при неизменной величине выходного сигнала пропорционально-интегрального регулятора 36. Это может привести к увеличению тока электродвигателя 1 и воз- 1шкновению больших тормозных моментов. Пусть в момент t изменилась выходная частота задающего генератора 19 и увеличилась продолжительность выходного сигнала узла 9 управления (фиг.2а). При этом напряжение управления СИФУ 13 (фиг,2д) еще больше уменьшается за счет увеличения отрицательного значения вычисленной ЭДС двигателя (-Еф), поступающей на сумматор 37, углы открывания тиристоров увеличиваются, что приводит к уменьшению тока, а следовательно, и тормозных моментов асинхронного двигателя 1. Таким образом, входные напряжения управления СИФУ 13 формируются так, чтобы уменьшить влияние внутренней обратной связи двигателя по ЭДС на его ток. СИФУ 13-15 преобразуют входные сигналы в последовательности импульсов открывания тиристоров, которые подаются на третьи входы формирователей 5-7 управляющих импульсов тиристоров преобразователя.
Таким образом, предлагаемый электропривод грузоподъемного механизма за счет введения преобразователя частота - напряжение, блока определения фазных ЭДС, управляемых коммутаторов инвертирующих усилителей, СИФУ, датчиков тока и датчиков напряжения имеет более высокие энергетические и динамические показатели в сравнении с известными техническими решениями, так как позволяет уменьшить тормозны моменты двигателя при переходе с одной частоты вращения на другую и повысить перегрузочную способность двигателя.
Формула изобретения
Частотно-регулируемый электропривод грузоподъемного механизма, содер
5
0
жащий трехфазный асинхронный электродвигатель, связанный выводами фазных обмоток Q выходом преобразователя частоты с непосредственной связью, составленного из трех групп тиристор- ных трехфазных мостов, формирователи управляющих импульсов тиристоров, соединенные своими выходами с управляющими цепями групп тиристорных трехфазных мостов, кольцевой сдви- гающкн регистр, выход которого подключен к первым входам формирователей управляющих импульсов тиристоров, задающие генераторы плавно и ступенчато изменяемой частоты, выходы которых соединены с входами узла управления, выходы которого подключены к вторым входам формирователей управляющих импульсов тиристоров, п пороговых элементов, подключенных входами к выходам командоаппарата, выходы k пороговых элементов подключены к входам задающего генератора плавно 5 изменяемой частоты, вьгходы (n-k) пороговых элементов подключены к входам задающего генератора ступенчато изменяемой частоты, выход п-го порогового элемента соединен с входом кольцевого сдвигающего регистра, отличающийся тем, что, с целью повьш1ения энергетических и динамических показателей за счет уменьшения тормозных моментов при переходе с одной частоты вращения на другую и повьш1ения перегрузочной способности, введены преобразователь частота - напряжение, блок определения фазных ЭДС, пять сумматоров, пропорционально-интегральный регулятор модуля ЭДС, три системы импульсно-фазо- вого управления, три выпрямителя, три управляемых коммутатора, три инвертирующих усилителя, датчики фазных токов и датчики фазных напряжений, формирователи управляющих импульсов тиристоров снабжены третьими- входами, их вторые входы соединены с управляющими цепями трех управляемых коммутаторов соответственно, выходы датчиков фазных токов и датчиков фазных напряжений подключены к входам блока определения фазных ЭДС, выходы которого подключены к входам выпрямителей и первым входам управляемых коммутаторов непосредственно и к вторым входам управляемых коммутаторов через инвертирующие усилители, выходы вьтрямителей соединены с входами
0
5
0
5
0
55
первого сумматора, выход которого подключен к первому входу второго сумматора, входы преобразователя частота - напряжение подключены к выходам задающих генераторов плавно и ступенчато изменяемой частоты, а выход преобразователя частота - напряжение соединен с вторым входом второго сумматора, выход которого подключен к входу пропорционально-интегрального регулятора модуля ЗДС, первые входы третьего, четвертого и пятого сумматоров объединены и подклю
чены к выходу пропорционально-интегрального регулятора модуля ЭДС, вторые входы третьего, четвертого и пятого сумматоров соединены с выходами первого, второго и третьего управляемых коммутаторов, третьи вх9ды формирователей управляющих импульсов тиристоров соединены с выходами соответствующих систем импульсно-фазово- вого управления, входы которых подключены к выходам соответственно третьего, четвертого и пятого сумматоров ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный электропривод для грузоподъемного механизма | 1986 |
|
SU1451829A1 |
| Регулируемый электропривод переменного тока | 1987 |
|
SU1494193A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 1992 |
|
RU2081504C1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления (его варианты) | 1982 |
|
SU1164851A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем (его варианты) | 1980 |
|
SU928587A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем (его варианты) | 1983 |
|
SU1495969A2 |
| Электропривод | 1985 |
|
SU1309244A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2231208C2 |
| Электропривод переменного тока | 1979 |
|
SU847480A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
Изобретение относится к электротехнике и может быть использовано в тиристорных асинхронньгх электроприводах переменного тока грузоподъемных механизмов с широким диапазоном регулирования частоты вращения. Целью изобретения является повышение энергетических и динамических показателей за счет уменьшения тормозных моментов при переходе с одной частоты вращения на другую и повышение перегрузочной способности. В структуре электропривода, содержащего тиристор- ный преобразователь частоты, асинхронный электродвигатель , командо- аппарат 17, пороговые элементы 16, сдвиговый регистр 8, генераторы ступенчато- и плавноизменяемой частоты 19 и 18, за счет введения преобразователя 20 частота - напряжение, блока 28 определения фазных ЭДС, сумматоров 21, 35, 37-39, пропорционально-интегрального регулятора 36, вьш- рямитепей 29-31, управляемых коммутаторов 10-12, систем 13-15 импульс- но-фазового управления, датчиков тока 22-24 и напряжения 25-27 повышаются энергетические и динамические показатели при частотном регулировании путем уменьшения тормозных моментов электродвигателя при переходе с одной частоты вращения на другую и повышается перегрузочная способность электродвигателя. 2 ил. с (О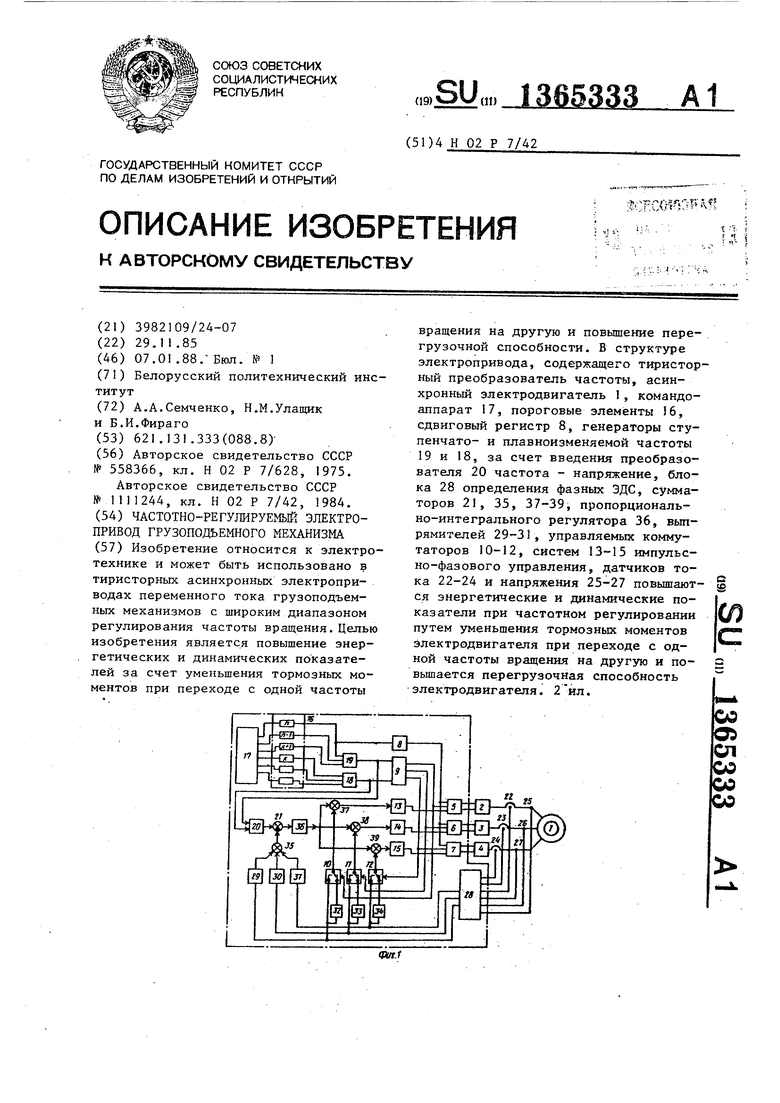
Фиг.
| Способ автоматического управления частотно-регулируемого электропривода и устройство для осуществления этого способа | 1975 |
|
SU558366A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотно-регулируемый электропривод для грузоподъемного механизма | 1983 |
|
SU1111244A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
