Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам на базе синхронных двигателей, и может быть использовано для регулирования момента на валу двигателя с высокой точностью.
Известен частотно-управляемый синхронны,й электропривод, содержащий синхронный двигатель, к обмоткам статора которого подключены фазные выходы регулируемого источника тока, дйтчнк углового положения, выполненный в виде сельсина, установленного на валу синхронного двигателя, источник трехфазного напряжения, подключенный к входным фазным обмоткам сельсина, однофазный выход которого соединен с входом формирователя импульсов, генератор импульсов, подключенный выходом к первому входу делителя частоты, другой вход которого соединен с выходом формирователя импульсов, а выход - с входом фильтра, блок амплитуднофазовых детекторов, к первым входам которых подключены выходы трехфазного источника опорной частоты, а к вторым входам - выход фильтра, при этом выходы амплитудно-фазовых детекторов подключены к фазным управляющим входам регулируемого источника тока (I.
Недостатком такого частотно-управляемого синхронного электропривода .является отсутствие возможности регулирования амплитуды тока статора. Кроме того, в электроприводе точность регулирования токов статора, а следовательно и момента на валу, является невысокой из-за погрешностей , вносимых сельсином и амплитуднофазовыми детекторами.
Наиболее близким к изобретению по технической сущности является частотно-управляемый синхронный электропривод, содержащий синхронный двигатель, к обмоткам статора которого подключены фазные выходы регулируемого источника тока, датчик углового положения, установленный на валу двигателя, блок задания амплитуды тока ста-, тора, подключ енный к управляющему входу блока преобразования координат, соединенного входами для опорных функций с выходами источника трехфазного синусоидального напряжения, при этом выходы блока преобразования координат подключены к первы.м входам блока фазочувствительных выпрямителей, вторые входы которого соединены с выходами формирователя опорных сигналов, подключенного к выходу датчика углового положения, а выходы блока фазочувствительных выпрямителей подключены к фазным управляющил4 входам регулируемого источника тока |2.
Недостатком известного частотно-управляемою синхронного электропривода является низкая точность управления, обусловленная iorpeiJjHocTHMH датчика углового
положения, выполненного в виде СКВТ, блока преобразования координат, содержащего аналоговые умножители, и блока фазочувствительных выпрямителей. 5 , Целью изобретения является повышение точности управления электроприводом.
Указанная цель достигается тем, что в частотно-управляемый синхронный электропривод, содержащий синхронный двигатель, к обмоткам статора KOTOporq подключены фазные выходы регулируемого источника тока, датчик углового положения, установленный на валу синхронного двигателя, и блок задания амплитуды тока статора, связанный выходом с фазными управляю 5 щими входами регулируемого источника тока, введены формирователь импульсов, два счетчика, каждый из которых снабжен входом для предварительной установки кода, входом записи и суммирующим входом; два постоянных запоминающих блока,
20 запрограммированных по синусоидальному закону, два цифроаналоговых умножителя и сумматор, причем дат)ик углового положения выполнен в виде фотоэлектрического частотно-импульсного преобразователя,
5 снабженного грубого и точного отсчетов, первый из которых подключен к входу формирователя импульсов, а второй - к объединенным между собой суммирующим входам счетчиков, выход формирователя импульсов подключен к объединенным между
0 собой входам записи счетчиков, выходы которых подключены к входам соответствуюдцих постоянных запоминающих блоков, запрограммированных по синусоидальному закону, соединенных выходами с цифровыми входами соответствующих цифроаналого5 вых умножителей, аналоговые входы которых объединены между собой и подключены к выходу блока задания амплитуды тока статора, выходьГ 1ифроаналоговых умножителей подключены к входам сумматора,
выход которого и выходы цифроаналого0V
вых умножителей подключены к соответствующим фазным управляющим входам регулируемого источника тока.
На чертеже представлена функциональная схема частотно-управляемого синхрон5 ного электропривода.
Частотно-управляемый синхронный элект ропривод содержит синхронный двигатель 1, к обмоткам статора которого подключены фазные выходы регулируемого источника 2 тока, датчик 3 углового положения, установленный на валу синхронного двигателя 1, блок 4 задания амплитуды тока статора, связанный выходом с фазными управляюц:имн входами регулируемого источника 2 тока.
В частотно-управляемый синхронный электропривод введены формирователь 5 импульсов, два счетчика 6 п 7, каждЕяй и: которых снабжен входом для предварительной установки кода, входом записи и суммирующим входом, два постоянных запоминающих блока 8 и 9, запрограммированных по синусоидальному закону, два цифроаналоговых умножителя 10 и 11 и сум матор 12, причем датчик 3 углового положения выполнен в виде фотоэлектрического частотно-импульсногопреобразователя,
снабженного выходами грубого и точного отсчетов первый из которых подключен к входу формирователя 5 импульсов, а второй - к объединенным между собой суммирующим входам счетчиков 6 и 7, при этом выход формирователя 5 импульсов подключен к объединенным между собой ёходам записи счетчиков 6 и 7, выходы ко- торых подключены к входам соответствуюЩ.ИХ постоянных запоминающих блоков 8 и 9, запрограммированных по синусоидальному закону, соединенных выходами с цифровыми входами соответствующих цифроаналоговых умножителей 10 и 11, аналоговые входы которых объединены между собой и подключены к выходу блока 4 задания амплитуды тока статора, выходы цифроаналоговых умножителей 10 и 11 подключены к входам сумматора 12, выход которого и выходы цифроаналоговых умножителей 10 и П - к соответствующим фазным управляющим входам регулируемого источника 2 тока. .
Частотно-управляемый синхронный электропривод работает следующим образом.
На вход D счетчика 6 подается информация в виде кода N) о требуемом фазовом сдвиге/9 вектора тока статора синхронного двигателя I относительно продольной оси ротора, а на вход D счетчика 7 - код угла 2Т/З.Коды Nja и N. периодически записываются в соответствующие счетчики 6 и 7 при поступлении сигнала нулевого импульса на их входы С. Сигнал нулевого импульса поступает с выхода грубого отсчета датчика 3, углового положения один раз за оборот ротора синхронного двигателя I на входы счетчиков 6 и 7 через формирователь 5 импульсов. При этом частотио-импульсный датчик 3 углового положения устанавливается на валу синхронного двигателя 1 таким образом,iчто нулевой импульс связан с продольной осью двигателя. При враЕцении синхронного двигателя 1, поступающие.с выхода точного отсчета датчика 3 углового положения импульсы частоты приводят к появлению на выходах счетчиков 6 и 7 информации в виде кодов Nj5+9 и Np+2% 4-9. которая характеризует текущее положение в вала синхронного двигателя 1 с учетом заданных фазовых сдвигов j3 Hft ifj3- Коды и (7з-f6 преобразуются с помощью запрограммированных по синусоидальному
закону постоянных запоминающих б 1оков 8 и 9 в коды и sin (-№/3 +в, которые подаются на цифровые входы цифроаналоговых умножителей 10 и П, на опор|1ые аналоговые входы которых поступает аналоговый сигнал задания U,j необходимой амплитуды тока статора с выхода блока 4 задания. На выходах цифроаналоговых умножителей 10 и П формируются гармонические функции регулируемой aitinлитуды и фаза которых определяется входными кодами Np и , а частота объемом счетчиков 6 и 7 и частотой входных импульсов им11 от датчика 3 углового положения. Сигналы на выходах цифроаналоговых умножителей 10 и И равнь)
U«, .U«-sin (pK,t4f);(О
U,, UH-sin (p,,t+ +2S/3),m
где p - число пар полюсов синхронного двигателя I;
частота вращения ротора синхронного двигателя 1;
-U/l
угол поворота ротора; т,.о,1Л (2.-1)рколичество импульсов, поступивших на вход счетчика 6 или 7. Объем счетчиков 6 и 7 выбирается равным Z/P.
Необходимая полюсность гармонических сигналов может быть получена также путем соответствующего программирования постоянных запоминающих блоков 8 и 9.
Сигналы USD и Уц являются задающими для двух фаз управляемого источника 2 тока, питающего статорные обмотки синхронного двигателя 1. Задающий сигнал для третьей фазы управляемого источника 2 тока получается на выходе сумматора 12 как сумма сигналов Ujo и Ufi. т.е.
U,i U«-fU,,.(3)
Как видно из выражений (1)-{3) на выходы управляемого источника 2 тока задаются трехфазные гармонические сиг5 налы регулируемой амплитуды с необходимым фазовым сдвигом и с частотой, в р раз превышающей частоту вращения ротора синхронного двигателя I, т.е. в электроприводе осуществляется управление синхронным двигателем с любым числом пар полюсов.
Таким образом, введение в частотноуправляемый синхронный электропривод формирователя импульсов, двух счетчиков, двух постоянных запоминающих блоков, 5 двух цифроаналоговых умножителей.и сумматора, а также выполнение датчика углового положения,в виАс фотоэлектрического частотно-импульсногопреобразователя позволяет получить стабильные гармонические сигналы заданий для фазных токов статора с регулированием их амплитуды и фазы в широких пределах и с высокой точностью, благодаря чему повышается точность регулирования тока статора и момента синхронного двигателя в сравнении с известным решением.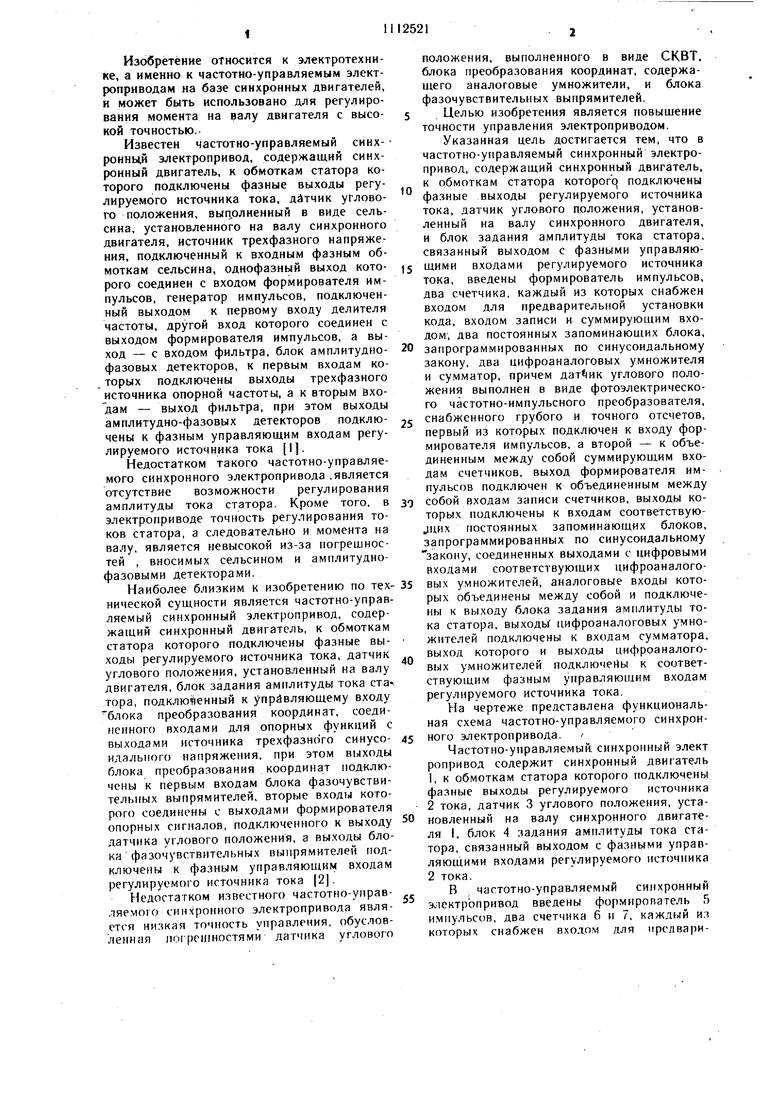

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Электропривод переменного тока | 1984 |
|
SU1197032A1 |
| Частотно-управляемый синхронный электропривод | 1985 |
|
SU1317634A2 |
| ЭЛЕКТРОПРИВОД С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2101845C1 |
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1279042A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Электропривод | 1987 |
|
SU1495971A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1330725A1 |
| Электропривод переменного тока | 1988 |
|
SU1767689A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2015 |
|
RU2584142C1 |
ЧАСТОТНО-УПРАВЛЯЕМЫЙ СИНХРОННЫЙ ЭЛЕКТРОПРИВОД, содержащий синхронный двигатель, к обмоткам статора которого подключены фазные выходы регулируемого источника тока, датчик углового положения, установленный на валу синхронного двигателя, и блоц задания амплитуды тока статора, связанный выходом с фазными управляющими входами регулируемого источника тока, отличающийся тем, что, с целью повыщения точности управления, введены формирователь импульсов, два счетчика, каждый из которых снабжен входом для предварительной установки кода, входом записи и суммирующим входом, два постоянных запоминающих блока, запрограммированных по синусоидальному закону, два цифроаналоговых умножителя и сумматор, причем датчик углового положения выполнен в виде фотоэлектрического частотно-импульсного преобразователя, снабженного выходами грубого и точного отсчетов, первый из которых подключен к входу формирователя импульсов, а второй - к объединенным между собой суммирующим входам счетчиков, выход формирователя импульсов подключен к объединенным между собой входам записи счетчиков, выходы которых подключены к входам соответствующих постоянных запоминающих блоков, запрограммированных по синусоидальному закону, соеднненных выходами с цифровыми входами соответствующих цифроаналоговых умножителей, аналоговые входы которых объединены между собой и подключены к выходу блока задания амплитуды тока статора, выходы цифроаналоговых умножителей подключены к входам сумматора, выход которого и выходы цифроаналоговых умножителей подключены к соответствующим фазным управляющим входам регулируемого источника тока.
| I | |||
| Устройство для управления электрической машиной переменного тока | 1980 |
|
SU930555A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1979 |
|
SU864476A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
