Бесконтактный реверсируемый электропривод по основному авт. св. № 186019 состоит из синхронного двигателя, питаемого от усилителей-преобразователей, охваченных обратной СВЯЗЬЮ ПО току, и датчика положения, установленного на одном валу с дви)гателем, в котором управление двигателем осуществляется частотно токовым способом, обеспечивающим независимость момента на валу от скорости двигателя, причем 1величина момента линейно зависит от входного сигнала.
Предложенный электропривод .более совершенен, так как дает воз1можность получить жесткую механическую характеристику.
Это обеспечивается тем, что в приводе применены тахомашина, собранная на синхронном генераторе с датчиком положения, выполненным на вращающемся трансформаторе, двух основных модуляторах и двух фазочувствительных выпрямителях, и дополнительный модулятор, причем его вход соединен с выходом тахомашины, а выход - с фазочувствительными выпрямителями усилителейпреобразователей исполнительного двигателя привода, а также тем, что выходы датчика положения подключены к опорным цепям фазочувствительных -выпрямителей усилителей-лреобразователей исполнительного двигателя привода.
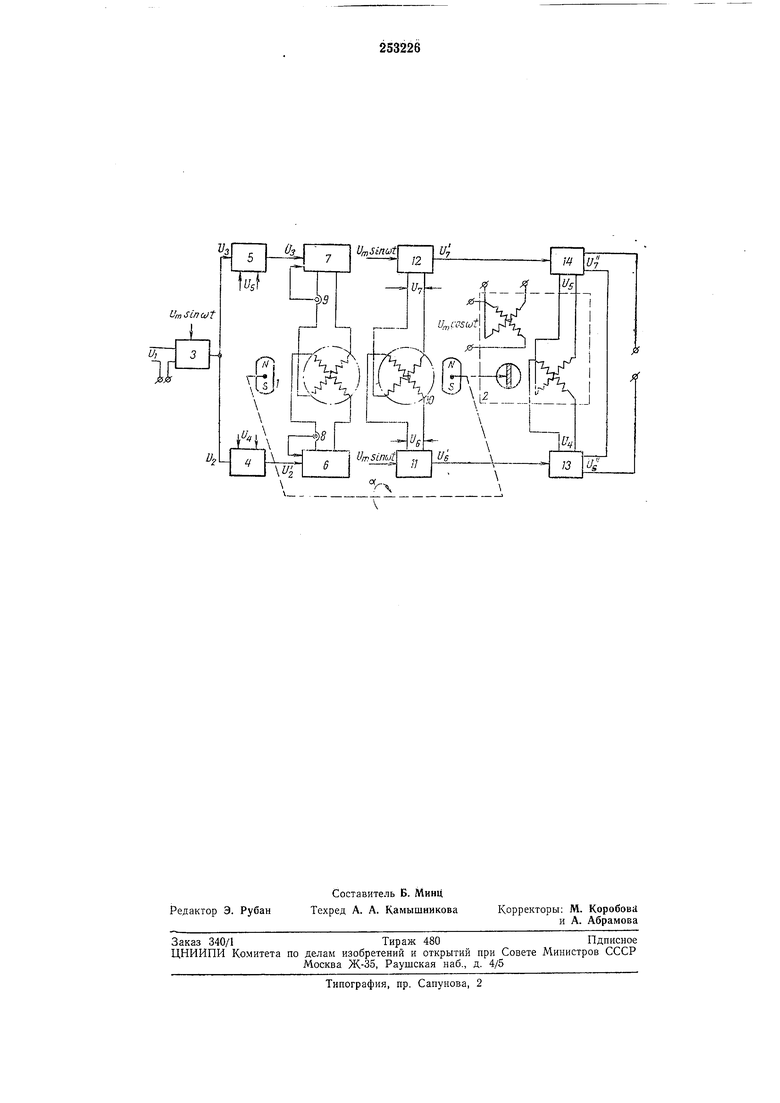
На чертеже изображена блок-схема предлагаемого электропривода, создающего момент на валу как в режиме вращения, так и при стоянке.
Привод построен на базе двухфазного синхронного двигателя i с ротором в виде постоянного магнита. В общем случае двигатель может быть т-фазным. С валом двигателя лсестко сцеплен датчик 2 положения типа
вращающегося трансформатора.
Управляющий сигнал Ll через модулятор 3, запитанный опорным напряжением L sinco, подается яа два фазочувствительных выпрямителя 4 я 5.
Входные напряжения выпрямителей: /з (/1 sign sincu f.
Фазочувствительные выпрямители 4 и 5 усилителей-преобравователей 6 и 7 запитапы опорными напряжениями U и U, снимаемыми с двух выходных обмоток датчика 2 положения, работающего в режиме фазовращателя.
Управляющие сигналы с выпрямителей 4 и 5 подаются на два усилителя-преобразователя 6 и 7, питающих статорные обмотки двигателя 1. Преобразователи 6 и 7 охвачены глубокой отрицательной обратной связью по току статора с П01мощью токовых преобразователей 8 к 9. Благодаря обратной связи по
оказываются пропорциональными управляющему сигналу. В связи с -постоянством потока двигателя его момент будет пропорционален управляющему сигналу.
Для получения синусоидальной формы статорных тОКов при вращении двигателя управляющие сигналы Uz и с фазочувствительных выпрямителей 4 и 5 должны изменяться по синусоидальному закону в функции угла поворота а ротора двигателя 1. Та1кая зависимость может быть получена, если в воздушном зазоре датчика 2 .положения, питающего опорные цепи этих выпрямителей, создается эллиптическое вращающееся поле с соотнощением полуосей, равным половине. Эллиптическое поле создается путем подачи на сдвинутые относительно друг друга в пространстве на 90° обмотки возбуждения датчика положения двухфазной системы напряжений с разными- а1мплитудами; причем одна из них в два раза больше другой.
Оси магнитных полей датчика положения и двигателя устанавливаются относительно друг друга та-ким образом, на выходах фазочувствительных выпрямителей напряжения изменялись согласно выраженияам:
U2 Uisma и f/s t/icosa.
Для осуществления обратной связи по скорости применена известная тахомашина постоянного тока, построенная на базе двухфазного синхронного генератора 10, вал которого сцеплен с валом двигателя 1.
Напряжения обмоток генератора 10 имеют вид:
Ue kQsma и (/7 /feQcosa,
где Q-угловая скорость вращения вала генератора 10. Эти напряжения подаются на два основных модулятора 11 и 12. Оба модулятора запитываются опорным напряжением той же фазы, что и модулятор 5. Промодулированные напряжения
t/6 sina-sign sinco и UT kQ cosa- (oi
подаются на два фазочувствительных выпрямителя 13 и 14, которые запитаны опорными напряжениями б и Us, снимаемыми с выходных обмоток того же датчика 2 положения, питающих также и опорные цепи выпрямителей 4 и 5. При этом оси магнитных полей синхронного генератора 10 и датчика 2, 5 также устанавливаются относительно друг друга так, чтобы выходные напряжения фазочув-ствительных выпрямителей 13 и 14 изменялись согласно выражениям
( t/esina AQsin2a и kQcos a..
Эти выходные напряжения суммируются для получения 1выходного напряжения постоянного тока, Пропорционального окорости
5 вращения. Полученное напряжение подается на вход модулятора 3 (непосредственнО или через усилитель).
Механические характеристики предлагаемого электропривода благодаря обратной связи
0 по скорости становятся жесткими, т. е. скорость вращения привода клало зависит от величины момента на валу.
Частотно-токовый электропривод может быть применен там, где необходимо удерживать длительное время груз в подвешенном состоянии, например в манипуляторах электропечей и др.
Предмет изобретения
1. Бесконтактный реверсируемый регулируемый привод по авт. св. N° 186019, отличающийся тем, что, с целью получения жестких механических характеристик, применены
тахомашина, собранная на синхронном генераторе с датчиком положения, выполненным на вращающемся трансформаторе, двух основных модуляторах и двух фазочувствительных выпрямителях, и дополнительный входной модулятор, причем его вход соединен с выходом тахомашины, а выход - с фазочувствительными выпрямителями усилителейпреобразователей исполнительного двигателя привода.
2. Привод по п. 1, отличающийся тем, что выходы датчика положения подключены к опорным цепям фазочувствительных выпрямителей усилителей-преобразователей исполнительного двигателя привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Электропривод с частотно-токовым управлением | 1981 |
|
SU1136292A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ СИГНАЛА СИНХРОННОЙ ТАХОМАШИНЫ | 1966 |
|
SU186556A1 |
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1283933A1 |
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
| Электропривод | 1979 |
|
SU864476A1 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2087068C1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2008 |
|
RU2392730C1 |
| Электропривод с частотно-токовым управлением | 1983 |
|
SU1111243A1 |
| Электропривод с частотно-токовым управлением | 1991 |
|
SU1836804A3 |