Изобретение относится к сельскому хозяйству и используется для контроля уровня при заполнении бункера стебельчатыми кормами.
Известен сигнализатор уровня, включающий электродвигатель, на валу которого установлена изогнутая лопатка.
Известен также указатель уровня сыпучих материалов, содержащий электродвигатель, вал с крыльчаткой, который расчленен пружиной. При этом червячное колесо перемещает червяк в осевом направлении и контактирует с микропереключателем.
Существенным недостатком этих устройств для контроля уровня материалов является то, что при работе в длиноволок- нистой среде они наматываются на чувствительный элемент. При этом возникают неустойчивые моменты сопротивления, что приводит к ложным срабатываниям и к нарушению технологического процесса контроля уровня.
Кроме этого, известные устройства для контроля уровня имеют сложную конструкцию, обусловленную принципом работы, основанным на регистрации изменения в обмотках электродвигателя в зависимости от усилия торможения средой роторной лопатки.
Сложность конструкции связана с наличием червячной пары, а также узлом расчленения вала пружиной.
Таким образом, известные устройства обладают низкой надежностью технологического процесса контроля уровня стебельчатых кормов и имеют сложную конструкцию.
Целью изобретения является повышение достоверности сигнализации в длинноволокнистой среде.
IO О CJ
сл
CN
Поставленная цель достигается тем, что в известном устройстве, включающем корпус с расположенным внутри него двигателем, на валу которого последовательно размещены механизм его расчленения, механизм взаимодействия с переключателем и чувствительный элемент, закрепленный на конце вала, чувствительный элемент выполнен в виде сплошной круглой пластины, механизм расчленения - в виде фрикционной муфты, а механизм взаимодействия с переключателем - в виде центробежной муфты с подвижным диском, жестко закрепленным на валу двигателя.
Выполнение чувствительного элемента в виде круга и его жесткое крепление к подвижному диску центробежной муфты позволяет в период загрузки стебельчатого корма в бункер подвижному диску центробежной муфты максимально возможно перемещать чувствительный элемент к стенке бункера, а при полной загрузке, когда чувствительный элемент начинает тормозиться и грузы центробежной муфты опускаются перемещать чувствительный элемент внутрь бункера, что увеличивает усилие торможения. Вследствие этого элемент быстро останавливается, что предотвращает перегрузку бункера.
Таким образом, предложенное устройство для контроля уровня стебельчатых кормов обладает высокой чувствительностью сигнализации в длинноволокнистой среде.
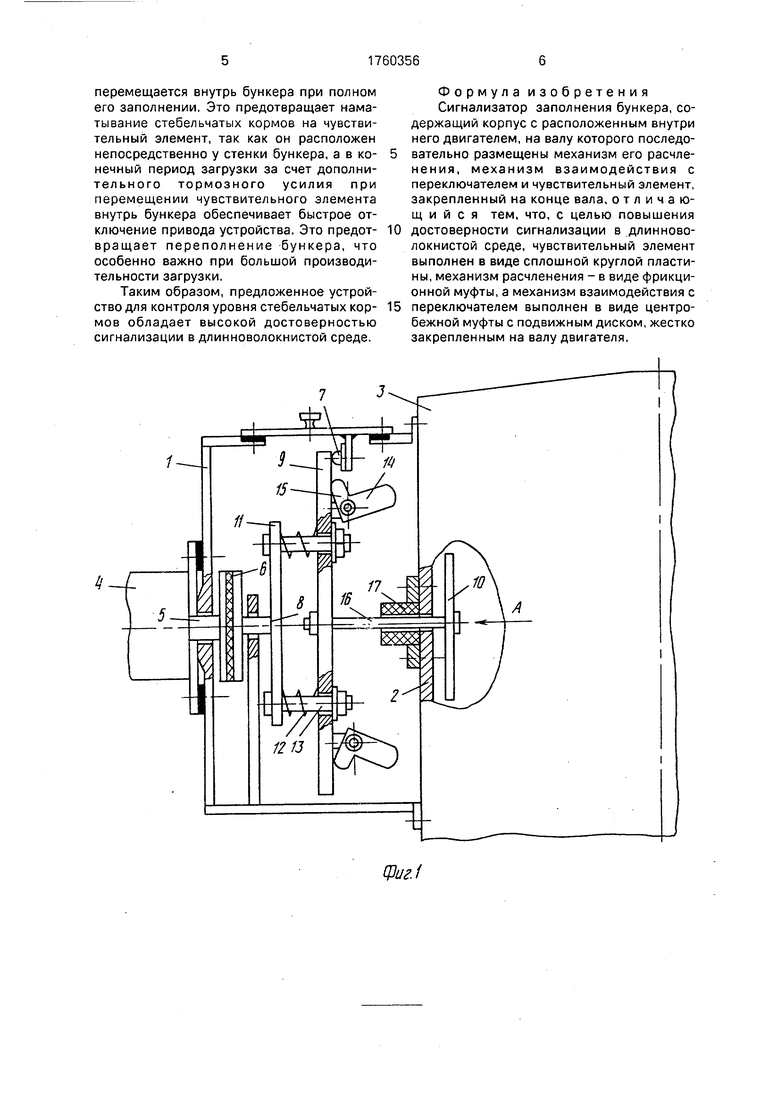
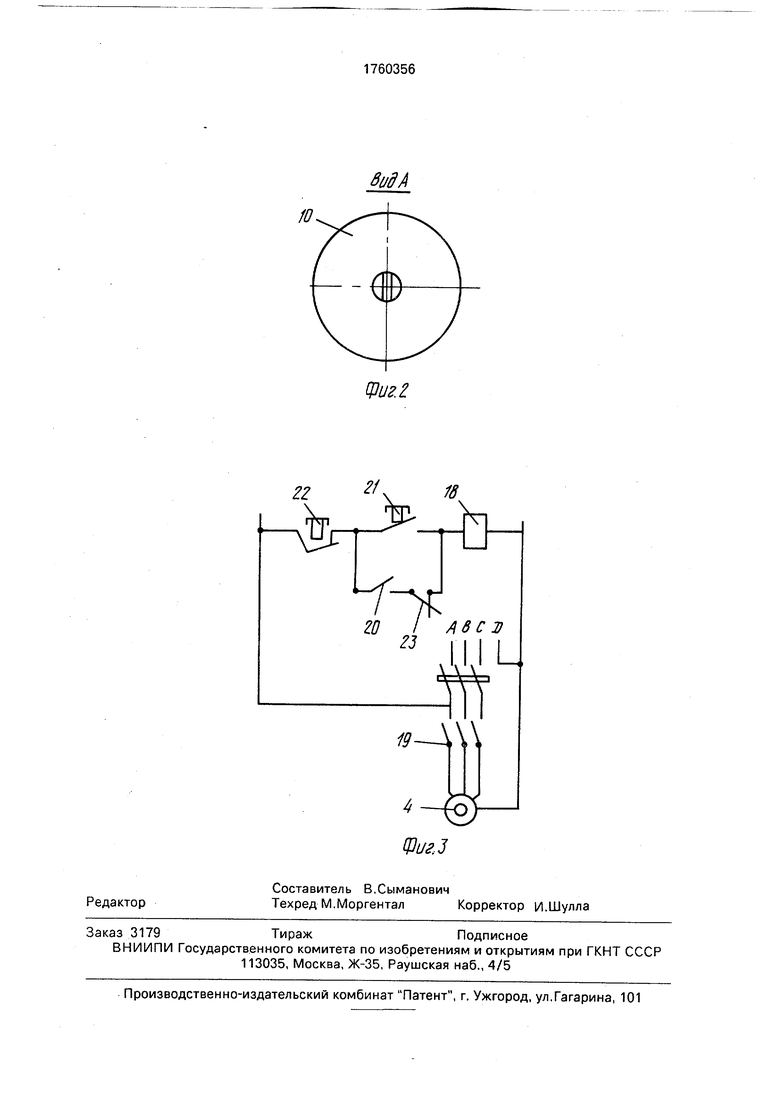
На фиг. 1 схематически показано предлагаемое устройство, общий вид сбоку; на фиг. 2 - вид А на фиг. 1 (чувствительный элемент); на фиг. 3 - электрическая схема.
Устройство для контроля уровня стебельчатых кормов содержит корпус 1, установленный на стенке 2 бункера 3, электродвигатель 4 с валом 5. В направлении продольной оси вала 5 последовательно установлены механизм расчленения вала
5,выполненный в виде фрикционной муфты
6.Механизм взаимодействия с микропереключателем 7, выполненный в виде центробежной муфты 8 с подвижным диском 9, и чувствительный элемент, выполненный в виде сплошной круглой пластины 10, жестко соединенной с подвижным диском 9 центробежной муфты 8. Пластина 10 располагается непосредственно у стенки 2 бункера 3 в процессе загрузки корма и установлена с возможностью перемещения внутрь бункера 3 при остановке чувствительного элемента усилием торможения, возникающем в результате вращения сплошной круглой пластины 10 в среде стебельчатого корма.
Центробежная муфта 8 состоит из неподвижного диска 11, подвижного диска 9, которые связаны между собой пальцами 12 через пружины 13. На подвижном диске 9 шарнирно закреплены грузы 14, которые при включенном электродвигателе 4 под действием центробежной силы расходятся. При этом плечи 15 грузов 14 нажимают на подвижный диск 9 центробежной муфты 8 и
диск 9 перемещается в осевом направлении относительно вала 5. Пластина 10 жестко закреплена к подвижному диску 9 центробежной муфты 8 с помощью вала 16, который свободно установлен во втулке 17.
Электрическая схема включает магнитный пускатель с катушкой 18 и контактами 19 и 20, кнопку 21 Пуск и кнопку 22 Стоп, а также контакт 23 микропереключателя 7. Работает устройство для контроля уровня стебельчатых кормов следующим образом.
При включении электродвигателя 4 с помощью кнопки 21 Пуск крутящий момент через фрикционную муфту 6 передается на
центробежную муфту 8 и через нее на чувствительный элемент 10. При этом грузы 14 расходятся, а их плечи 15 нажимают на подвижный диск 9, перемещая его в осевом направлении. Сплошная круговая пластина
10 вместе с диском 9 перемещается к стенке 2 бункера 3 на максимально технологически допустимое к ней расстояние.
При заполнении бункера 3 стебельчатым кормом до уровня чувствительного элемента 10 пластина при своем вращении испытывает сопротивление и при достижении определенного момента сопротивления пластина 10 начинает останавливаться. При этом фрикционная муфта 6 пробуксовывает,
частота вращения центробежной муфты снижается и грузы 14 опускаются. Под воздействием пружин 13 подвижный диск 9 перемещается в сторону бункера 3. Чувствительный элемент вместе с диском 9
перемещается внутрь бункера 3 и усилие его торможения дополнительно увеличивается. Чувствительный элемент 10 вместе с центробежной муфтой останавливается и подвижный диск 9 нажимает на контакт 23
микропереключателя 7, включая электродвигатель 4.
При повторном нажатии на кнопку Пуск 21 катушка 18 магнитного пускателя замыкает контакты 19 и электродвигатель 4
включается.
В предложенном устройстве для контроля уровня стебельчатых кормов чувствительный элемент перемещается на минимально допустимое расстояние кстенке бункера в процессе его загрузки, а затем
перемещается внутрь бункера при полном его заполнении, Это предотвращает наматывание стебельчатых кормов на чувствительный элемент, так как он расположен непосредственно у стенки бункера, а в конечный период загрузки за счет дополнительного тормозного усилия при перемещении чувствительного элемента внутрь бункера обеспечивает быстрое отключение привода устройства. Это предотвращает переполнение бункера, что особенно важно при большой производительности загрузки.
Таким образом, предложенное устройство для контроля уровня стебельчатых кормов обладает высокой достоверностью сигнализации в длинноволокнистой среде.
0
5
Формула изобретения Сигнализатор заполнения бункера, содержащий корпус с расположенным внутри него двигателем, на валу которого последовательно размещены механизм его расчленения, механизм взаимодействия с переключателем и чувствительный элемент, закрепленный на конце вала, отличающийся тем, что, с целью повышения достоверности сигнализации в длинноволокнистой среде, чувствительный элемент выполнен в виде сплошной круглой пластины, механизм расчленения - в виде фрикционной муфты, а механизм взаимодействия с переключателем выполнен в виде центробежной муфты с подвижным диском, жестко закрепленным на валу двигателя.

| название | год | авторы | номер документа |
|---|---|---|---|
| КОВШОВЫЙ ПОГРУЗЧИК | 1991 |
|
RU2029712C1 |
| Кормораздатчик | 1989 |
|
SU1667769A1 |
| Ковшовый погрузчик | 1989 |
|
SU1715678A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ НАВОЗА | 1991 |
|
RU2040139C1 |
| Кормораздатчик | 1988 |
|
SU1604288A1 |
| Кормораздатчик | 1989 |
|
SU1644843A1 |
| Устройство для выдачи приготовленного корма | 1984 |
|
SU1308286A1 |
| Устройство для контроля уровня сыпучих материалов | 1988 |
|
SU1597574A1 |
| Погрузчик ковшовый | 1987 |
|
SU1502432A1 |
| Устройство для дозированной раздачи кормов | 1984 |
|
SU1178368A1 |
Использование: изобретение относится к сельскому хозяйству, в линиях переработки стебельчатых кормов кормоприготови- тельных цехов. Сущность изобретения: устройство содержит установленный на стенке прямоугольного бункера корпус и электродвигатель, на валу которого последовательно установлены фрикционная муфта, механизм взаимодействия с микропереключателем, выполненном в виде центробежной муфты с подвижным диском и чувствительный элемент, выполненный в виде круга и жестко закрепленный к подвижному диску центробежной муфты и установленный с возможностью перемещения к стенке бункера в период его загрузки и вовнутрь бункера при остановке чувствительного элемента усилием торможения, возникающим в результате вращения в среде стебельчатого корма. 3 ил. сл с
Фиг. Z
| Пьезоэлектрический измерительный приемник звука (синхрофон), работающий в схеме коррелятора | 1958 |
|
SU151056A1 |
| - прототип. | |||
