Изобретение относится к электротехнике, в частности к электрическим двигателям с дискретным движением. Оно может быть использовано в электромеханических системах с шаговым движением исполнительного механизма и для построения разомкнутых позиционных систем.
Известен линейный электродвигатель, имеющий статор, включающий катушки и полюса, а также якорь с полюсами (патент № 2033680, Н02К 41/03, опубл. 2000.08.27. Бюл. № 24/2000) - [1].
Его недостатками являются малое усилие, развиваемое в воздушном зазоре.
Наиболее близким к заявляемому объекту по технической сущности является линейный двигатель, содержащий шихтованный магнитопровод статора с полюсными выступами (зубцами), обмоткой, постоянными магнитами и якорь (патент RU № 2275732, Н02К 41/03, опубл. 2007.04.27. Бюл. № 200712) - [2].
Недостатками данного двигателя являются большая масса лайнера, ограничивающая его динамические свойства, а также малое усилие, развиваемое в одном воздушном зазоре.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в улучшении массогабаритных показателей шагового электродвигателя и его динамических характеристик.
Технический результат достигается тем, что в линейный шаговый электродвигатель, содержащий основные шихтованные магнитопроводы статора со стержнями и с зубцами, двухфазную обмотку управления и постоянные магниты, введены дополнительный магнитопровод статора с зубцами и пластины статора и лайнера, пластины статора механически связаны с дополнительным магнитопроводом статора, лайнер, имеющий возможность поступательного перемещения, каждая пластина имеет чередующиеся ферромагнитные и немагнитные элементы, все магнитные элементы пластин и все зубцы имеют одинаковые продольные размеры, магнитные элементы пластин лайнера расположены на равном расстоянии друг от друга, определяющем зубцовый шаг, каждый основной магнитопровод статора имеет центральный широкий стержень и два боковых узких стержня, причем зубцы на широком и узких стержнях смещены на половину зубцового деления, зубцы на стержнях соседних магнитопроводов статора смещены на четверть зубцового деления относительно друг друга, зубцы основных магнитопроводов статора, дополнительного магнитопровода и магнитные элементы пластин, связанных со статором, имеют одинаковое продольное положение, фазы обмотки управления расположены поочередно на широких стержнях, соседние постоянные магниты намагничены тангенциально и встречно.
Сущность заявленного изобретения поясняется чертежами, где:
Фиг.1 показало продольное сечение линейного шагового двигателя;
Фиг.2 - поперечное сечение линейного шагового двигателя;
Фиг.3 - графики напряжений питания фаз обмотки.
Здесь: 1 - основные магнитопроводы статора, 2 - широкие стержни, 3 - узкие стержни, 4 - постоянные магниты, 5 - двухфазная обмотка, 6 - пластины лайнера, 7 - пластины статора, 8 - дополнительный магнитопровод, 9, 10 - немагнитные пластины, 11 - корпус.
Шаговый двигатель имеет основные шихтованные магнитопроводы с ярмами статора 1, с широкими стержнями 2 и с узкими стержнями 3, высококоэрцитивные постоянные магниты 4, двухфазную обмотку 5 с фазами А и В, пластины лайнера 6, пластину статора 7, дополнительный шихтованный магнитопровод 8, немагнитные пластины 9, 10, корпус 11.
На стержнях 2, 3 имеются коронки с зубцами, обращенными к рабочему воздушному зазору. На магнитопроводе 8 имеются аналогичные зубцы. Пластина 7 состоит из ферромагнитных и немагнитных элементов. Она механически связана со статором немагнитной пластиной 9. Зубцы на стержнях 2, 3, зубцы магнитопровода 8 и ферромагнитные элементы пластины 7 имеют одинаковое линейное расположение.
Пластины 6 состоят из ферромагнитных и немагнитных элементов. Ферромагнитные элементы расположены на одинаковом расстоянии друг от друга, которое определяет зубцовый шаг. Пластины 6 механически связаны с немагнитным элементом 10 и образуют лайнер.
Зубцы широкого 2 и тонких 3 стержней одного магнитопровода смещены относительно друг друга на половину зубцового деления. Зубцы двух соседних широких стержней смещены на четверть зубцового деления относительно друг друга. Обмотки фазы А и В расположены поочередно на широких стержнях. Соседние постоянные магниты 4 намагничены тангенциально и встречно.
Основные магнитопроводы 1, 2, 3 и дополнительный магнитопровод 8 установлены в корпусе 11.
Шаговый двигатель работает следующим образом. Магнитное поле в рабочих зазорах (на Фиг.1 их четыре) создается совместным действием постоянных магнитов и тока одной из фаз. Постоянные магниты создают магнитный поток, направленный вверх, в стержнях фазы А и направленный вниз в стержнях фазы В.
При подаче положительного импульса напряжения на фазу А магнитный поток широкого стержня возрастает, а потоки узких стержней уменьшаются. В результате лайнер занимает положение, при котором зубцы широкого стержня фазы А, зубцы магнитопровода 8 и соответствующие ферромагнитные элементы пластин 6, 7 расположены друг против друга. При этом магнитная проводимость потока широкого стержня максимальна. Это положение лайнера показано на Фиг.1.
При подаче положительного импульса напряжения на фазу В магнитный поток ее широкого стержня уменьшается, а потоки узких стержней возрастают. В результате лайнер займет положение, при котором зубцы узких стержней фазы В, зубцы магнитопровода 8 и соответствующие ферромагнитные элементы пластин 6, 7 расположены друг против друга. При этом магнитная проводимость потоков узких стержней максимальна. Лайнер сдвинется на четверть зубцового деления.
При подаче отрицательного импульса напряжения на фазу А магнитный поток ее широкого стержня уменьшается, а потоки узких стержней возрастают. В результате лайнер займет положение, при котором зубцы узких стержней фазы А, зубцы магнитопровода 8 и соответствующие ферромагнитные элементы пластин 6, 7 расположены друг против друга. При этом магнитная проводимость потоков узких стержней максимальна. Лайнер сдвинется еще на четверть зубцового деления и т.д.
Для реверса следует изменить порядок чередования фаз. После положительного импульса напряжения фазы А нужно подать отрицательный импульс напряжения на фазу В, далее отрицательный импульс - на фазу А, затем положительный импульс на фазу В и т.д. Это показано - на Фиг.2 правее штриховой линии.
Эффективность предлагаемой конструкции шагового двигателя объясняется разделением магнитных потоков широких и узких стержней на несколько частей и их многократным использованием в нескольких рабочих зазорах. В приведенном варианте электромагнитная сила возрастает в 4 раза по сравнению с обычным шаговым двигателем с магнитной редукцией.
Сила, действующая на один ферромагнитный элемент лайнера со стороны одного зазора, определяется формулой
Здесь F - сила; Um - магнитное напряжение на зазоре; Λ - магнитная проводимость; l - активная длина элемента; х - перемещение лайнера; µ0 - магнитная постоянная; δ - длина воздушного зазора; Н - напряженность магнитного поля в зазоре; В - магнитная индукция в зазоре.
Дифференцируя проводимость Λ по х, получаем:
Здесь m - число элементов под широкими стержнями одной возбужденной фазы или под малыми стержнями той же фазы; n - число рабочих зазоров; В1, Н1 - магнитная индукция и напряженность магнитного поля под широкими стержнями возбужденной фазы; F1, F1Σ - усилие на элемент под широким стержнем со стороны одного зазора и суммарное усилие на все элементы под широкими стержнями возбужденной фазы; В2, Н2 - магнитная индукция и напряженность магнитного поля под узкими стержнями той же фазы; F2, F2Σ - усилие на элемент под узким стержнем со стороны одного зазора и суммарное усилие на все элементы под узкими стержнями той же фазы.
Усилия F1Σ и F2Σ направлены в разные стороны. Результирующее усилие определяется выражениями
 .
.
С учетом равенств
Iw=n(H1-H2)δ, 
получаем выражение для результирующей силы:
FΣ=mlBmIw,
где Iw - МДС одной фазы; Вm - магнитная индукция в зазоре, созданная постоянным магнитом. Из последней формулы видно, что с увеличением числа элементов m под широкими стержнями одной фазы пропорционально возрастает суммарное усилие. При увеличении m ширина одного элемента уменьшается, что требует соответственного уменьшения толщины одной пластины, уменьшения зазора δ и увеличения количества зазоров n при фиксированной МДС фазы Iw.
Теоретически можно получить неограниченно большое усилие, увеличивая число пластин при одновременном уменьшении их толщины, зазоров и ширины пластин, имея фиксированный объем электродвигателя и постоянную МДС одной фазы.
Динамические характеристики линейного шагового электродвигателя улучшаются благодаря выполнению лайнера в виде нескольких тонких пластин, через которые магнитный поток проходит перпендикулярно и транзитом. Малая масса лайнера допускает большие линейные ускорения.
Таким образом, введением дополнительных пластин лайнера и статора из чередующихся ферромагнитных и немагнитных элементов, а также введением дополнительного магнитопровода статора получен линейный шаговый электродвигатель с усилием, увеличенным в несколько раз, но при тех же габаритных размерах, и с высокими динамическими показателями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321144C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366064C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ | 2008 |
|
RU2375807C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| Способ построения линейного электропривода | 2020 |
|
RU2762288C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437200C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2013 |
|
RU2544836C1 |
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
Изобретение относится к электротехнике, к линейным шаговым электродвигателям с постоянными магнитами и может быть использовано в промышленных, транспортных и приборных электромеханических системах. Технический результат заключается в улучшении массогабаритных показателей. Линейный шаговый двигатель имеет основные шихтованные магнитопроводы с ярмами статора 1, с широкими стержнями 2 и с узкими стержнями 3, высококоэрцитивные постоянные магниты 4, двухфазную обмотку 5 с фазами А и В, дополнительный шихтованный магнитопровод 8. Пластины 6 механически связаны немагнитной пластиной 10 и образуют лайнер. Пластины 7 механически связаны со статором немагнитной пластиной 11. Каждая пластина имеет чередующиеся ферромагнитные и немагнитные элементы, расположенные в поперечном направлении. Все магнитные элементы пластин и все зубцы имеют одинаковые продольные размеры. Магнитные элементы пластин лайнера расположены на равном расстоянии друг от друга, определяющем зубцовый шаг. Зубцы на широком и узких стержнях смещены на половину зубцового деления. Зубцы на стержнях соседних магнитопроводов статора - на четверть зубцового деления. Зубцы основных магнитопроводов статора, дополнительного магнитопровода и магнитные элементы пластин, связанных со статором, имеют одинаковое продольное положение. Фазы А и В расположены поочередно на широких стержнях. Соседние постоянные магниты намагничены тангенциально и встречно. 3 ил.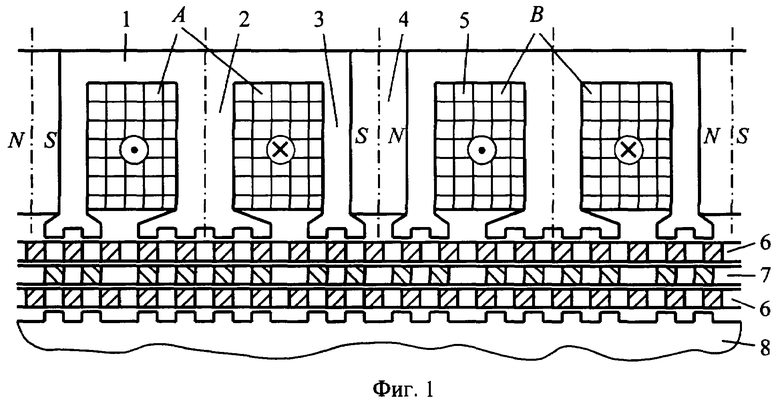
Линейный шаговый электродвигатель, содержащий шихтованные магнитопроводы статора со стержнями и с зубцами, двухфазную обмотку управления и постоянные магниты, отличающийся тем, что в него введены дополнительный магнитопровод статора с зубцами и пластины лайнера и статора, пластины статора механически связаны с магнитопроводом статора, лайнер имеет возможность поступательного перемещения, каждая пластина имеет чередующиеся ферромагнитные и немагнитные элементы, расположенные в поперечном направлении, все ферромагнитные элементы пластин и все зубцы имеют одинаковые продольные размеры, ферромагнитные элементы пластин лайнера расположены на равном расстоянии друг от друга, определяющем зубцовый шаг, каждый магнитопровод статора имеет центральный широкий стержень и два боковых узких стержня, причем зубцы на широком и узких стержнях смещены на половину зубцового деления, зубцы на стержнях соседних магнитопроводов статора смещены на четверть зубцового деления, зубцы магнитопроводов статора, дополнительного магнитопровода и ферромагнитные элементы пластин, связанных со статором, имеют одинаковое продольное положение, фазы обмотки расположены поочередно на широких стержнях, соседние постоянные магниты намагничены тангенциально и встречно.
| ЛИНЕЙНЫЙ ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 1992 |
|
RU2046525C1 |
| Линейный шаговый электродвигатель | 1989 |
|
SU1723642A1 |
| Линейный шаговый электродвигатель | 1988 |
|
SU1658314A1 |
| Линейный шаговый электродвигатель | 1987 |
|
SU1457105A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2004 |
|
RU2275732C2 |
| DE 3338864 A, 26.04.1984. | |||

