Двух- и трехпозиционные золотники с дистанционным гидравлическим управлением, ход которых ограничивается упорами, широко известны в системах гидроуправления. Однако устройства для дистанционного гидравлического управления четырехпозиционным золотником неизвестны; такие золотники управляются вручную.
Отличительная особенность предлагаемого устройства заключается в том, что оно содержит два подпружиненных плунжера, связанных с управляющими линиями и воздействующих на двуплечий дифференциальный рычаг, связанный с управляемым четырехпозиционным золотником.
Ход управляющих плунжеров, а следовательно, и золотника определяется регулируемыми упорами (ограничителями хода) плунжеров. Такая конструкция устройства обеспечивает возможность дистанционного управления четырехпозиционным золотником.
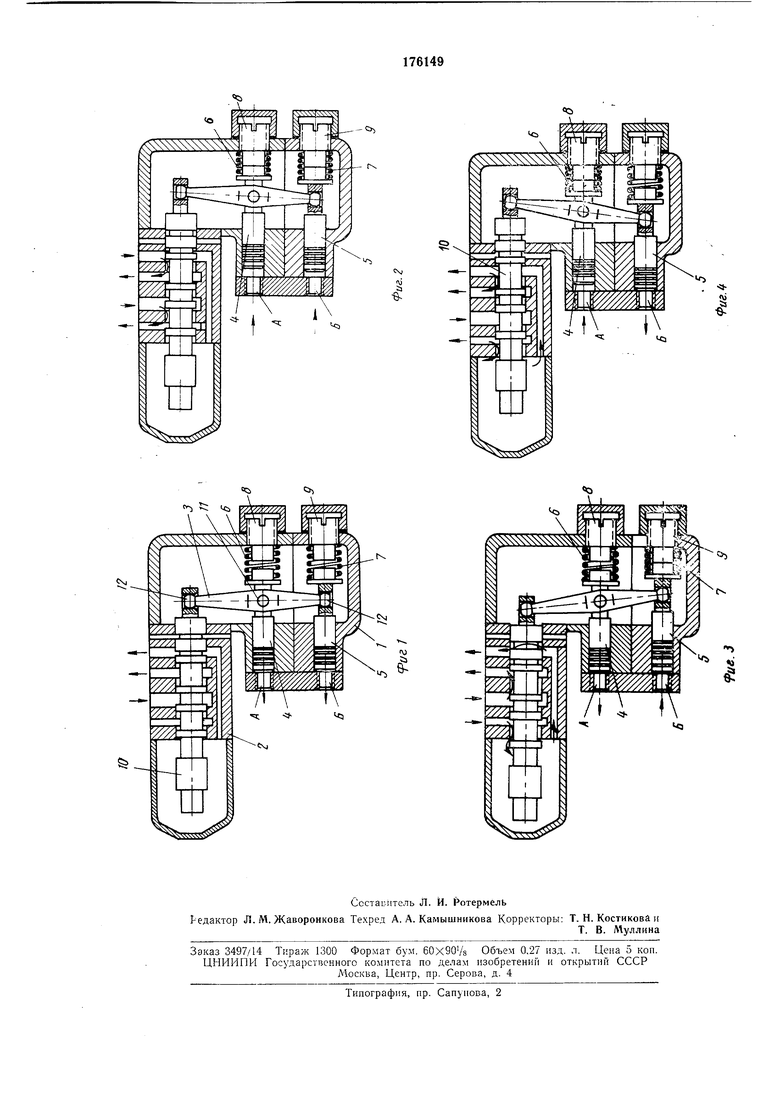
На фиг. 1 изображено описываемое устройство, нейтральное положение управляемого золотника; на фиг. 2 - то же, положение, соответствующее опусканию; на фиг. 3 - то же, положение, соответствующее подъему; на фиг. 4 - to же, плавающее положение.
Устройство выполнено в виде приставки, Корпус / которой жестко крепится к корпусу 2 гидравлического распределителя. Приставка содержит двуплечий рычаг 3, управляющие плунжеры 4 и 5, установленные в расточках корпуса / и подпружиненные возвратными пружинами 6 и 7, и регулируемые упоры S и 9. Упоры ограничивают иеремещение плунжеров и фиксируют золотник 10 в определенном положении.
Рычаг соединен посредине с управляющим плунжером 4 щарниром //, а с упорами управляющего плунжера 5 и управляемого золотника - своими сферическими наконечниками 12.
При нейтральном полол ении золотника рабочие плоскости А и Б управляющих плунм еров соединены со сливом. Плунжеры пружинами отжаты в левое крайнее положение.
Рабочее масло иод давлением подается з полости А и Б (фиг. 2), управляющие плунжеры перемещаются в крайнее правое положение до упоров, преодолевая сопротивление пружин; рычаг тоже Перемещае-Гся, увлекая за собой управляемый золотник, который фиксируется в положении, соответствующем опусканию. При подаче рабочего масла под
давлением в полость Б и отводе масла на слив из Лолости А (фиг. 3) плунжер 5 перемещается вправо до регулируемого упора 9, сжимая пружину 7. Для того чтобы плунжер 4 оставался нерычаг разворачивался относительно неподвижного шарнира, величина нредварительиого натяга возвратной 6 должна находиться в соответствии с величиной силы сопротивления перемещению управляемого золотника. Величина предварительного натяга пружины 6 регулируется упорами S и 9. В этом случае управляемый золотник фиксируется в положении, соотг етствующем подъему.
При подаче рабочего масла под давлением в полость А и отводе рабочего масла на слив из полости Б (фиг. 4) плунжер 4 перемещается вправо до упора 8, сжимая пружину 6. Упор 8 должен быть отрегулирован так, чтобы при перемещении плунжера 4 плунжер 5
оставался неподвижным и рычаг разворачивался относительно неподвижного шарнира. Золотник фиксируется в плавающем положении.
Предмет изобретения
Устройство для управления четырехпозиционным золотником, отличающееся тем, что, с целью обеспечения возможности дистанционного управления, оно содержит два подпружиненных плунжера, связанных с управляющими линиями и воздействующих на двуплёчий дифференциальный рычаг, связанный с управляемым золотником.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический сервопривод управления гусеничной машины | 1985 |
|
SU1286458A1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ ОДНОСТОРОННЕГОДЕЙСТВИЯ | 1966 |
|
SU184635A1 |
| Гидравлический мультивибратор | 1974 |
|
SU633009A1 |
| Поворотный делительный стол | 1980 |
|
SU980976A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КЛАПАНОМ ГАЗОРАСПРЕДЕЛЕНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1993 |
|
RU2056517C1 |
| СИСТЕМА УПРАВЛЕНИЯ ФЛЮГЕРНО-РЕВЕРСИВНЫМ ВОЗДУШНЫМ ВИНТОМ ДЛЯ САМОЛЕТОВ МЕСТНЫХ АВИАЛИНИЙ | 1996 |
|
RU2099241C1 |
| Насосная станция | 1985 |
|
SU1377452A1 |
| ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2238220C2 |
| Клепальный пресс | 1980 |
|
SU1016031A1 |
| ГИДРАВЛИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 1966 |
|
SU214849A1 |