Известны гидравлические датчики перемещений, выполненные в виде цилиндрических золотников, которые фиксируют стабильное положение контрольной точки деформируемой детали и этим дают команду для прекращения деформации. Однако в датчиках такого типа при значительных колебаниях предела упругости деформируемых деталей после снятия нагрузки, контрольная точка не занимает стабильного положения относительно базовых точек.
Предлагаемый датчик отличается тем, что он снабжен подвижным в направлении контролируемого прогиба подпружиненным командоаппаратом с упором на конце, ограничивающим перемещение золотника, причем диаметр плунжера и пружина командоаппарата подобраны так, что их перемещение равно величине упругого прогиба деформируемой детали на линии действия силы:
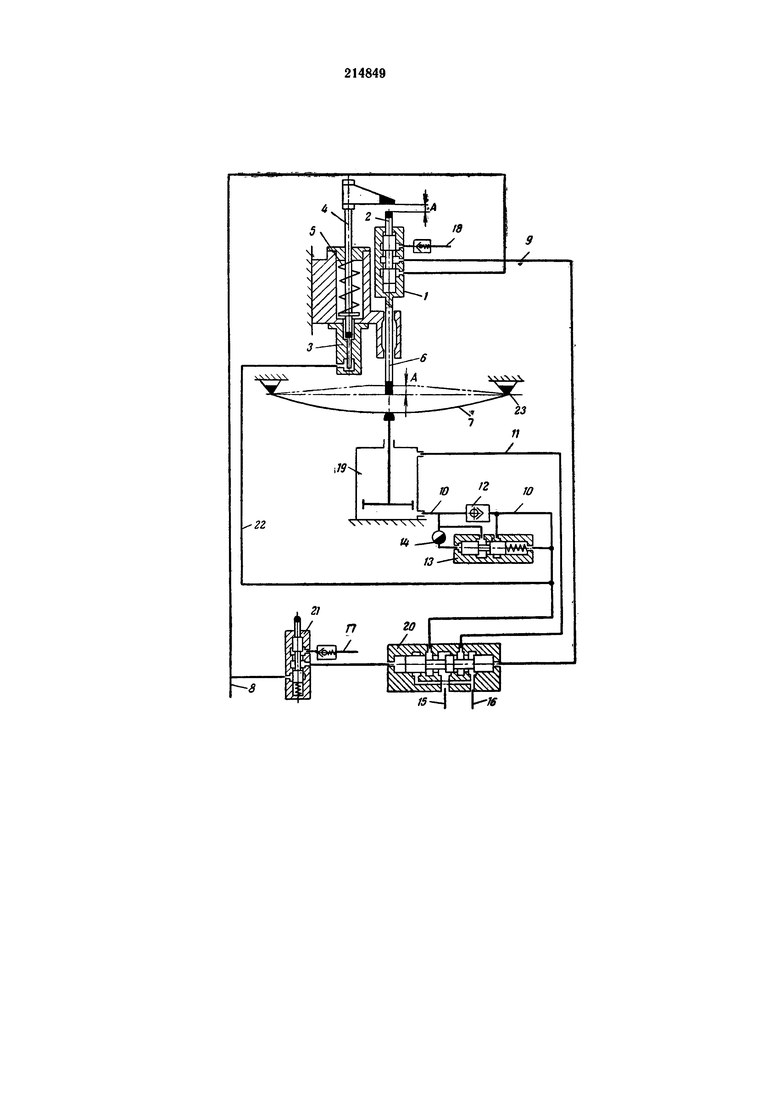
На чертеже изображена схема предлагаемого датчика.
Он выполнен в виде цилиндрического золотника 1 и снабжен подвижным в направлении контролируемого прогиба подпружиненным плунжерным командоаппаратом, который состоит из плунжера 2, корпуса 3, упорного стержня 4, пружины 5 и упора 6. Перемещение упора командоаппарата равно величине А (величине упругого остаточного прогиба деформируемой детали 7) и ограничивает перемещение золотника 1.
В схему подключения датчика входят: напорная магистраль 8 управления, трубопроводы 9, 10 и 11, обратный клапан 12, напорный золотник 13, регулируемый дроссель 14, напорная магистраль 15, трубопроводы 16, 17 и 18 слива, а также гидроцилиндр 19, золотник 20 дистанционного управления, командный агрегат 21 включения рабочего хода пресса и трубопровод 22 подвода рабочей жидкости к датчику.
Работа датчика состоит в том, что деформируемую деталь устанавливают на опорах 23 пресса, прикладывая к ней силу гидроцилиндром 19. Гидроцилиндр управляет распределительным золотником 20 с помощью командного агрегата 21, включающего рабочий ход, и датчиком остаточной величины стрелы прогиба деформируемых деталей, который дает команду обратного хода силовому гидроцилиндру пресса. При рабочем ходе давление нижней рабочей полости гидроцилиндра через трубопровод 22 передается плунжеру 2 датчика. Плунжер, перемещаясь в корпусе 3 вверх, через упорный стержень 4 деформирует пружину 5. Диаметр плунжера и пружины выбирают с таким расчетом, чтобы их перемещение под действием давления масла было одинаково с перемещением деформируемой детали 7 на линии действия силы в пределах упругой деформации детали при одинаковом давлении рабочей жидкости.
Свое перемещение деформируемая деталь сообщает золотнику 1, свободно перемещающемуся в вертикальном направлении. Когда напряжение в деформируемой детали превышает напряжение предела упругости, конец плунжера 2 пропускает масло из напорной магистрали 8 управления через трубопровод 9 в торцовую полость золотника 20. Плунжер золотника 20 занимает среднее положение в своем корпусе и соединяет со сливом трубопроводы 10 и 11. Движение вверх штока гидроцилиндра 19 прекращается.
Под действием сжатой пружины 5 упор дожимает плунжер 2 командоаппарата, увеличивая проходные сечения, соединяющие трубопровод 9 с напорной магистралью управления. Плунжер золотника 20 переводится в крайнее левое положение и шток гидроцилиндра 19 опускается вниз. Для задержки опускания штока гидроцилиндра под действием силы деформированной детали в момент переключения командоаппарата установлено гидравлическое реле времени перекрытия трубопровода 10 при движении рабочей жидкости из нижней полости гидроцилиндра 19, состоящее из обратного клапана 12, напорного золотника 13 и регулируемого дросселя 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1969 |
|
SU251366A1 |
| Пресс для высокочастотной сварки деталей из термопластичных материалов | 1983 |
|
SU1111865A1 |
| ПРЕСС ГИДРОИМПУЛЬСНОГО ШАГОВОГО ДЕЙСТВИЯ | 1996 |
|
RU2093296C1 |
| Устройство для контроля износа режущего инструмента | 1974 |
|
SU512283A2 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА | 1992 |
|
RU2014523C1 |
| Привод подач шлифовального станка | 1980 |
|
SU931433A1 |
| КЛАПАННАЯ СИСТЕМА АВАРИЙНОГО ОТКЛЮЧЕНИЯ | 2006 |
|
RU2319054C2 |
| АКСИАЛЬНО-ПОРШНЕВОЙ НАСОС И ГИДРАВЛИЧЕСКАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА С АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 2000 |
|
RU2172428C1 |
| ГИДРАВЛИЧЕСКИЙ ИСТОЧНИК СЕЙСМИЧЕСКИХ ВОЛН | 1991 |
|
RU2023275C1 |
Гидравлический датчик перемещений, выполненный в виде цилиндрического золотника, отличающийся тем, что, с целью получения заданной остаточной стрелы прогиба деформируемой детали, он снабжен подвижным в направлении контролируемого прогиба подпружиненным командоаппаратом с упором на конце, ограничивающим перемещение золотника, причем диаметр плунжера и пружина командоаппарата подобраны так, что их перемещение равно величине упругого прогиба деформируемой детали на линии действия силы.
