Изобретение относится к области механической обработки заготовок, в частности к приводам зажимных патронов токарных станков.
Целью изобретения является расширение технологических возможностей путем обеспечения выбора оптимального усилия зажима.
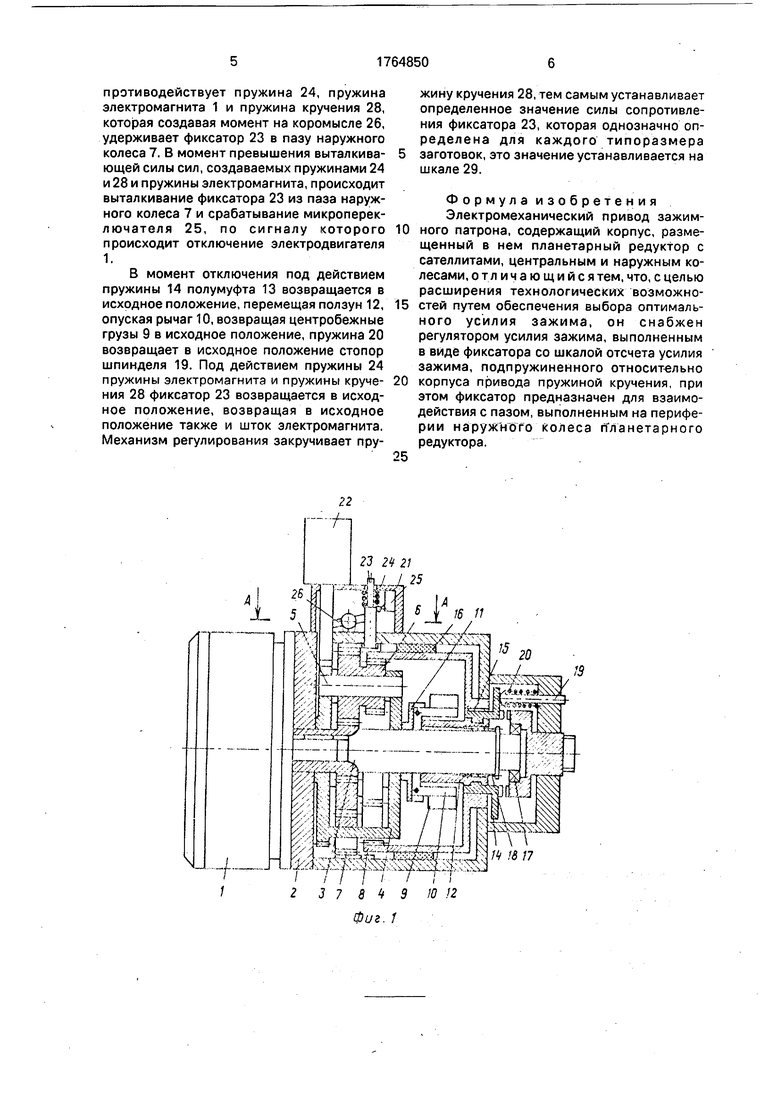
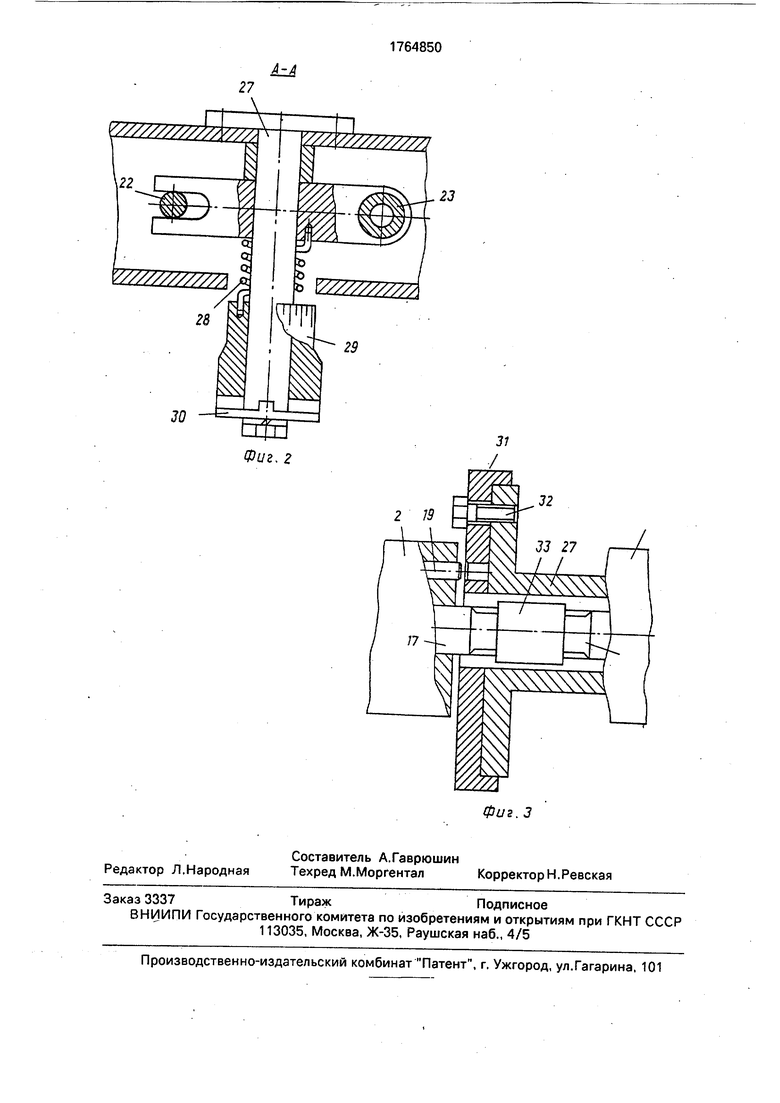
На фиг,1 изображен электромеханический привод, общий вид; на фиг.2 регулятор усилия, расположенный на переключателе скоростей электромеханического привода; на фиг.З - стопорение шпинделя.
Электромеханический привод содержит двигатель 1, на фланце которого крепится корпус 2. На шпонке вала двигателя посажен вал 3 электромеханического привода, на валу 3 на подшипниках посажено водило 4, в котором установлено три оси 5, с насаженными на них блоками сателлитов 6, один из сателлитов каждого блока входит в зацепление с шестерней на валу 3 и на- ружным колесом 7, а другой сателлит блока б входит в зацепление с другим наружным колесом 8.
Шестерня вала 3, водило 4 с осями 5 и блоками сателлитов 6, а также наружные колеса 7 и 8 составляют планетарный редуктор электромеханического привода. Далее на валу 3 установлена центробежная муфта, которая содержит центробежные грузы 9, установленные на больших плечах рычагов 10. Рычаги 10 свободно поворачиваются на осях втулки 11, неподвижно закрепленной на валу 3. Своими меньшими плечами рычаги 10 приводят в движение ползун 12. На ползуне 12 на подшипнике насажена полу- муфта 13, а в пазу ползуна установлена возвратная пружина 14. Наружное колесо 8 через скользящую шпонку 15 соединено с полумуфтой 13, а втулка 16 фиксирует наружное колесо 8 в корпусе 1.
Полумуфта 13 своим зубчатым венцом во время работы привода зацепляется с аналогичным венцом полумуфты 17, которая опирается на подшипник 18, посаженный на вал 3, полумуфта 17 заканчивается шлицами, служащими для соединения полумуфты с приводным валом патрона. Полумуфта 13 также приводит в движение стопор шпинделя 19, который перемещается в направляющих корпуса 2 возвращается в исходное положение возвратной пружиной 20. На корпусе 2 расположен корпус 21 переключателя скоростей, на котором установлен электромагнит 22. Шток электромагнита 22 заканчивается зубом, при работе входящем в зацепление с зубчатым венцом водила 4. В направляющей корпуса 21 также передвигается фиксатор 23, при движении входящий в пазы наружного колеса 7 и возвращающийся в исходное положение пружиной 24. Фиксатор 23 взаимодействует также с микропереключателем 25. Шток электромагнита 22 соединен с фиксатором 23 через качающееся коромысло 26, на котором расположен регулятор усилия зажи- ма заготовки.
На шпиндель 27 надета пружина кручения 28, одним концом связанная с коромыслом 26, другим - со втулкой с отсчетной шкалой 29. Втулка может фиксироваться на оси 27 в двенадцати положениях при помощи торцовых шлицев и стопорной шайбы с выступом 30, которая крепится на оси 27 (фиг.2).
Стопор 19 взаимодействует с отверстием переходного диска 31, которых в нем 12. Диск 31 крепится к шпинделю 27 при помощи винта 32. Вращение на приводной вал патрона передается от полумуфты 17 через муфту 33.
Электромеханический привод работает следующим образом. При подаче сигнала Зажим включается электродвигатель 1, который приводит в движение вал 3, который через блок сателлитов 6 передает вращение на наружное колесо 8. Одновременно включается электромагнит 22 и стопорит водило 4, поворачивая коромысло 26 и выводя фиксатор 23 из зацепления с неподвижным колесом 7, при этом наружное колесо 7 начинает вращаться, а водило 4 становится неподвижным - привод работает в ускоренном режиме.
В этот же момент при включении двигателя центробежные грузы 9 радиально перемещаются, поворачивая рычаги 10. Рычаги 10, поворачиваясь, передвигая ползун 12, который совместно с полумуфтой 13 скользит по направляющей шпонке 15. Полумуфта 13 входит в зацепление с полумуфтой 17, тем самым движение от наружного колеса 8 передается на приводной вал патрона. Полумуфта 13, передвигаясь, выдвигает стопор 19, который стопорит шпиндель 27 станка. Стопорение шпинделя осуществляется следующим образом.
Стопор 19, выдвигаясь из корпуса 2, входит в отверстие переходного диска 31. Вращение на привод. Микропереключатели 25, взаимодействуя с фиксатором 23, подают сигнал о начале ускоренного режима работы электромеханического привода. На фиг.1 электромеханический привод изображен в исходном положении. После того, как на ускоренном ходу заготовка окажется зажатой, двигатель продолжает работать, момент на валу двигателя растет, а следовательно, растет и ток якоря двигателя 1, это увеличение тока регистрируется и сигнал поступает на электромагнит 22, который, отключаясь, освобождает водило 4 и одновременно через коромысло 26 опускает фиксатор 23 в паз наружного колеса 7, застопоривая его.
Степень редукции планетарного редуктора становится 1:70, начинается рабочий режим элеткромеханического привода, происходит дозажим патрона. При дозажиме патрона непрерывно растет момент на приводном валу патрона, увеличение момента передается через полумуфты 17 и 13, наружное колесо 8, блок сателлитов 6 на наружное колесо 7, увеличивая выталкивающую силу фиксатора 23. Выталкиванию фиксатора 23
противодействует пружина 24, пружина электромагнита 1 и пружина кручения 28, которая создавая момент на коромысле 26, удерживает фиксатор 23 в пазу наружного колеса 7. В момент превышения выталкивающей силы сил, создаваемых пружинами 24 и 28 и пружины электромагнита, происходит выталкивание фиксатора 23 из паза наружного колеса 7 и срабатывание микроперек- лючателя 25, по сигналу которого происходит отключение электродвигателя 1.
В момент отключения под действием пружины 14 полумуфта 13 возвращается в исходное положение, перемещая ползун 12, опуская рычаг 10, возвращая центробежные грузы 9 в исходное положение, пружина 20 возвращает в исходное положение стопор шпинделя 19. Под действием пружины 24 пружины электромагнита и пружины кручения 28 фиксатор 23 возвращается в исходное положение, возвращая в исходное положение также и шток электромагнита. Механизм регулирования закручивает пру0
5
0
5
жину кручения 28, тем самым устанавливает определенное значение силы сопротивления фиксатора 23, которая однозначно определена для каждого типоразмера заготовок, это значение устанавливается на шкале 29
Формула изобретения Электромеханический привод зажимного патрона, содержащий корпус, размещенный в нем планетарный редуктор с сателлитами, центральным и наружным колесами, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения выбора оптимального усилия зажима, он снабжен регулятором усилия зажима, выполненным в виде фиксатора со шкалой отсчета усилия зажима, подпружиненного относительно корпуса привода пружиной кручения при этом фиксатор предназначен для взаимодействия с пазом, выполненным на периферии наружного колеса п ланетарного редуктора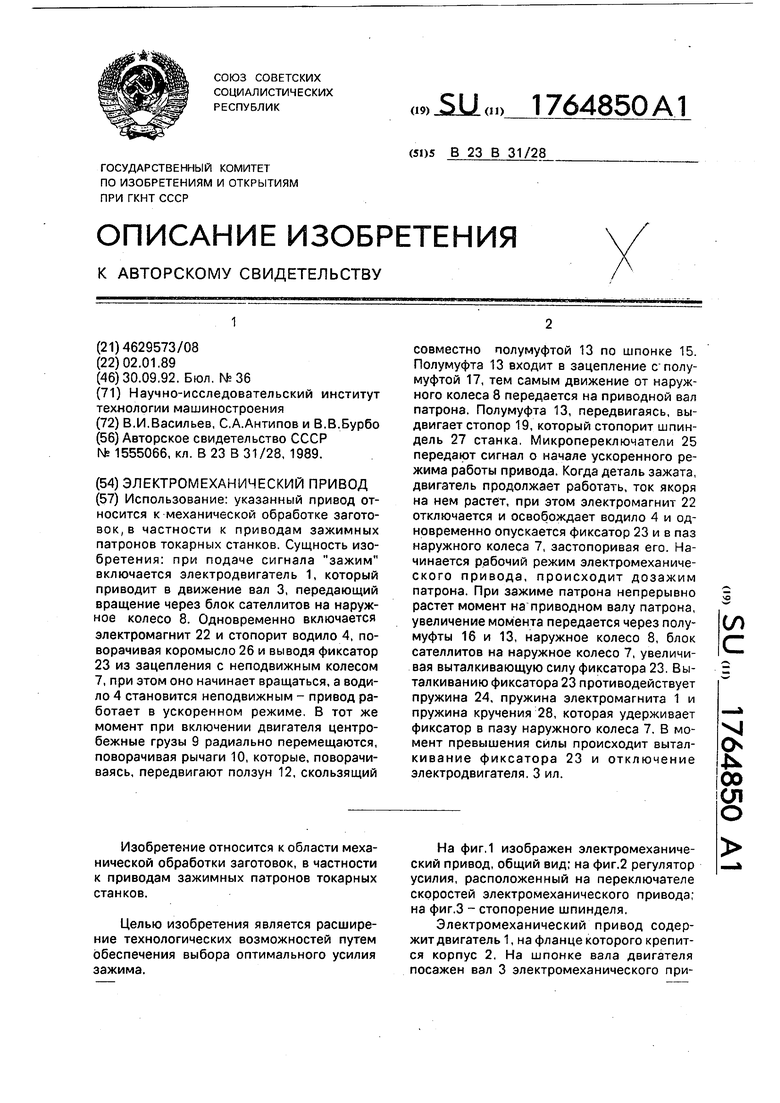

| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический привод зажимного самоцентрирующего патрона | 1989 |
|
SU1696164A1 |
| Устройство для поперечной резки труб | 1981 |
|
SU988469A1 |
| Токарный патрон | 1978 |
|
SU747034A1 |
| Патрон для метчиков | 1976 |
|
SU650744A1 |
| Переносной сверлильно-резьбонарезной станок | 1982 |
|
SU1060362A1 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1971 |
|
SU297161A1 |
| Механизм розыска "раза" к ткацкому станку | 1987 |
|
SU1509438A1 |
| ЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1968 |
|
SU209178A1 |
| Электромеханический привод зажимного устройства | 1983 |
|
SU1235664A1 |
| Устройство для транспортирования трубчатых изделий | 1982 |
|
SU1055710A1 |
Использование: указанный привод относится к механической обработке заготовок, в частности к приводам зажимных патронов токарных станков. Сущность изобретения: при подаче сигнала зажим включается электродвигатель 1. который приводит в движение вал 3, передающий вращение через блок сателлитов на наружное колесо 8. Одновременно включается электромагнит 22 и стопорит водило 4, поворачивая коромысло 26 и выводя фиксатор 23 из зацепления с неподвижным колесом 7, при этом оно начинает вращаться, а водило 4 становится неподвижным - привод работает в ускоренном режиме В тот же момент при включении двигателя центробежные грузы 9 радиально перемещаются, поворачивая рычаги 10, которые, поворачиваясь, передвигают ползун 12, скользящий совместно полумуфтой 13 по шпонке 15. Полумуфта 13 входит в зацепление с полумуфтой 17, тем самым движение от наружного колеса 8 передается на приводной вал патрона. Полумуфта 13, передвигаясь, выдвигает стопор 19, который стопорит шпиндель 27 станка. Микропереключатели 25 передают сигнал о начале ускоренного режима работы привода. Когда деталь зажата, двигатель продолжает работать, ток якоря на нем растет, при этом электромагнит 22 отключается и освобождает водило 4 и одновременно опускается фиксатор 23 и в паз наружного колеса 7, застопоривая его. Начинается рабочий режим электромеханического привода, происходит дозажим патрона. При зажиме патрона непрерывно растет момент на приводном валу патрона, увеличение момента передается через полумуфты 16 и 13, наружное колесо 8, блок сателлитов на наружное колесо 7, увеличивая выталкивающую силу фиксатора 23. Выталкиванию фиксатора 23 противодействует пружина 24, пружина электромагнита 1 и пружина кручения 28, которая удерживает фиксатор в пазу наружного колеса 7. В момент превышения силы происходит выталкивание фиксатора 23 и отключение электродвигателя. 3 ил. СО с J о 00 сл о
22
7П
23 2f 2/
-LAa«
JL
; /I ly
Uyf
2 Ю 2 Фиг 1
CTFj -Н ftJl §
30
Фиг. 2
L
| Электромеханический зажимной саморежущий патрон | 1988 |
|
SU1555066A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
