1
(21)4906759/03
(22)31.01.91
(46)3009.92. Бюл. №36
(72) Л.Д. Певзнер и Д Г Пономарев
(56)Журнал Уголь, 1988, Ms 6, с 36-38.
(54) СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМОВ ВЫНУТОЙ ГОРНОЙ МАССЫ
(57)Сущность: включает определение рельефа рабочего карьера до и после выемки горной массы оптическими средствами путем определения парциальных расстояний
от плоскости, параллельной земной поверхности, до рабочей поверхности карьера с помощью лазерных датчиков, установленных на стреле экскаватора-драглайна, задают парциальную площадь, сравнивают соответствующие парциальные расстояния предыдущего и последующих измерений, результат сравнения умножают на заданную парциальную площадь и получают парциальные объемы, суммируя которые получают объемы вынутой горной массы. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| СПОСОБ РАЗРАБОТКИ ПЛАСТОВЫХ МЕСТОРОЖДЕНИЙ ДРАГЛАЙНАМИ | 2015 |
|
RU2584334C1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| СПОСОБ ТРАНСПОРТИРОВАНИЯ НА ГЛУБОКИХ КАРЬЕРАХ | 1992 |
|
RU2046951C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| СПОСОБ РАЗРАБОТКИ ВСКРЫШНЫХ ПОРОД | 2014 |
|
RU2563517C1 |
| СПОСОБ РАЗРАБОТКИ МАЛЫХ КИМБЕРЛИТОВЫХ ТРУБОК | 2008 |
|
RU2426882C2 |
| СПОСОБ И СИСТЕМА ДЛЯ АКТИВНОГО ВЗВЕШИВАНИЯ ГРУЗА ДЛЯ ГОРНОПРОХОДЧЕСКОГО ОБОРУДОВАНИЯ | 2015 |
|
RU2652593C1 |
| Способ восстановления почвенного массива при подготовке санитарно-защитной зоны карьеров | 1990 |
|
SU1765400A1 |
Изобретение относится к землеройному машиностроению и может быть использовано в землеройных машинах, например экскаваторах.
Существует два типа определения производительности экскаваторов один из которых заключается в определении веса ковша при каждом цикле экскавации, другой - по объему экскавируемой горной массы.
Наиболее близким к предлг гаемому является способ определения объемов вынимаемой горной массы из карьера включающий съем информации о рельефе карьера с самолета до и после выемки горной массы
Однако известный способ не позволяет определить объем вынимаемой горной массы экскаватором-драглайном. Кроме того, средства реализации известного способа являются дорогими, так как сьемка осуществляется с самолета
Целью изобретения является расширение функциональных возможностей за счет
определения выемки горной массы экскаватором-драглайном
Поставленная цель достигается тем, что в способе определения объемов вынимаемой горной массы определение рельефа карьера до и после выемки производится оптическими средствами, при этом измеряют парциальные расстояния от плоскости стрелы до поверхности карьера с помощью лазерных датчиков, установленных на стреле экскаватора-драглайна, задают парциальную площадь поверхности сравнивают соответствующие параметры предыдущего и последующего измерений, умножают их на парциальную площадь поверхности, при этом полученная величина определяет объем экскавируемой горной массы. Измерение парциальных расстояний позволяет ускорить съем рабочего рельефа карьера за счет исключения фотограмметрического способа получения рельефа, который требует время на обработку фотографических материалов и их оцифровку
(Л
С
VJ
С ОТ
I- 00
Предлагаемый способ вычисляет объем один раз, в то время как известный способ вычисляет его дважды.
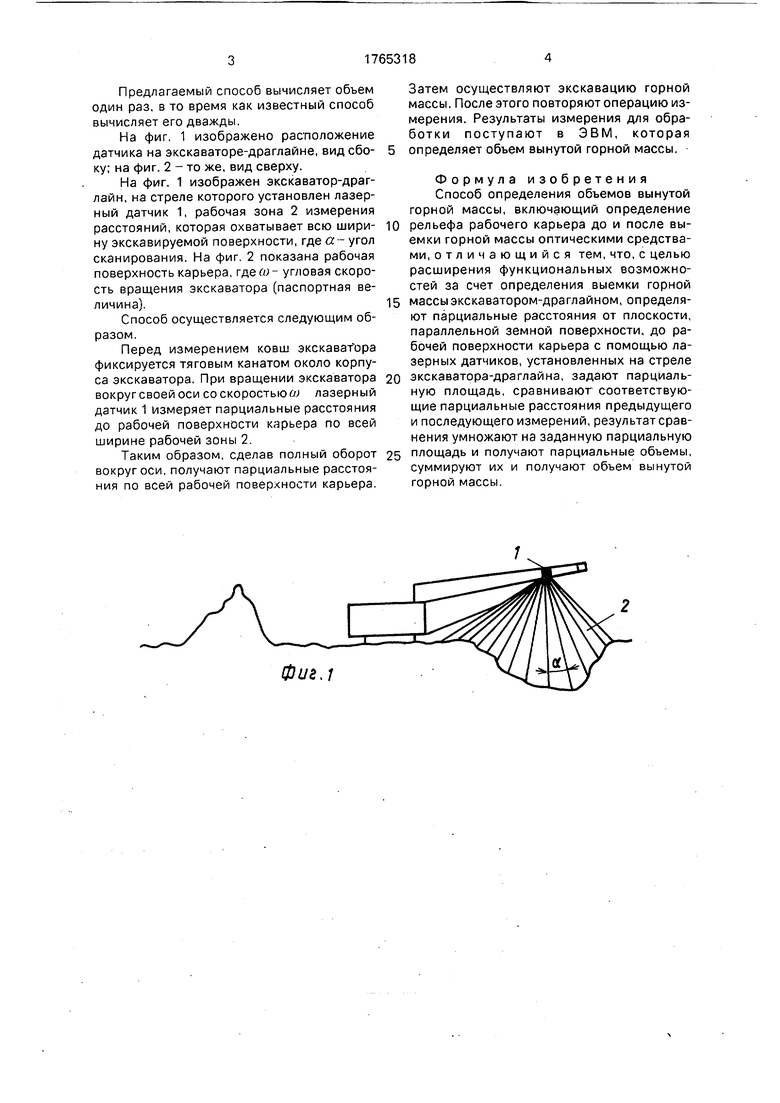
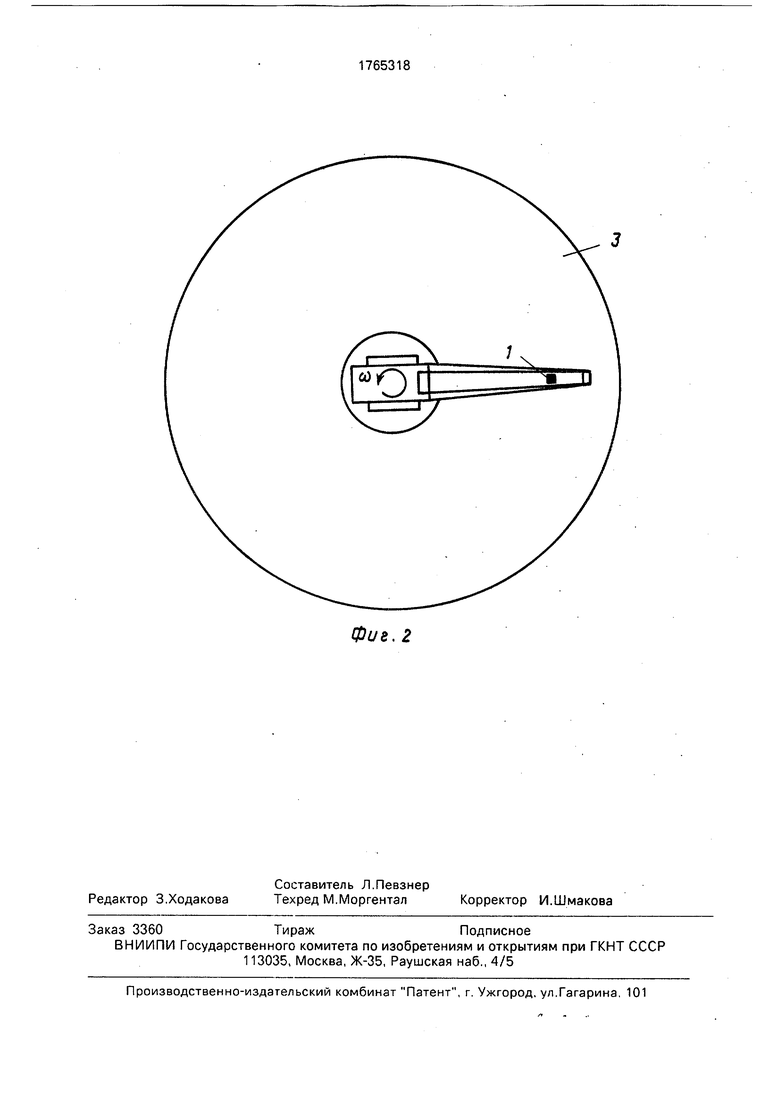
На фиг. 1 изображено расположение датчика на экскаваторе-драглайне, вид сбо- ку; на фиг. 2 - то же, вид сверху.
На фиг. 1 изображен экскаватор-драглайн, на стреле которого установлен лазерный датчик 1, рабочая зона 2 измерения расстояний, которая охватывает всю шири- ну экскавируемой поверхности, где а - угол сканирования. На фиг. 2 показана рабочая поверхность карьера, где а)- угловая скорость вращения экскаватора (паспортная величина).
Способ осуществляется следующим образом.
Перед измерением ковш экскаватора фиксируется тяговым канатом около корпуса экскаватора. При вращении экскаватора вокруг своей оси со скоростью о; лазерный датчик 1 измеряет парциальные расстояния до рабочей поверхности карьера по всей ширине рабочей зоны 2.
Таким образом, сделав полный оборот вокруг оси, получают парциальные расстояния по всей рабочей поверхности карьера.
Фиг.1
Затем осуществляют экскавацию горной массы. После этого повторяют операцию измерения. Результаты измерения для обработки поступают в ЭВМ, которая определяет объем вынутой горной массы.
Формула изобретения Способ определения объемов вынутой горной массы, включающий определение рельефа рабочего карьера до и после выемки горной массы оптическими средствами, отличающийся тем, что, с целью расширения функциональных возможностей за счет определения выемки горной массы экскаватором-драглайном, определяют парциальные расстояния от плоскости, параллельной земной поверхности, до рабочей поверхности карьера с помощью лазерных датчиков, установленных на стреле экскаватора-драглайна, задают парциальную площадь, сравнивают соответствующие парциальные расстояния предыдущего и последующего измерений, результат сравнения умножают на заданную парциальную площадь и получают парциальные объемы, суммируют их и получают объем вынутой горной массы.
Фиг. 2
