ел
эо :п

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ автоматического учета основных показателей работы драглайна | 1986 |
|
SU1421830A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ измерения количества работы выполненной экскаватором-драглайном | 1982 |
|
SU1097765A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |

Изобретение относится к измерению параметров работы, выполненной драглайном при ведении открытых горных работ. Цель изобретения - повышение точности измерения контролируемых параметров работы за счет определения объемов экскавируемой горной массы. В процессе экскавации измеряют угол наклона плоскости поворотной платформы экскаватора и угол поворота блока наводки тягового каната. В каждом цикле экскавации определяют начало операции черпания. При черпании определяют координаты кромки зубьев ковша в трехмерной системе координат. Задают минимальные и максимальные значения координат параметров забоя и отвала и сравнивают с ними фактические координаты кромки зубьев ковша. По результатам сравнения судят о нарушениях заданных параметров забоя и отвала. Запоминают координаты кромки зубьев ковша в процессе черпания. Определяют в каждом цикле объем вынутой из забоя горной массы. Производительность в цикле определяют по формуле П I=V I .φ/T цI, где V I - объем вынутой из забоя горной массы в I-м цикле
φ - угол поворота платформы
T цI - длительность I-го цикла экскавации. 2 з.п. ф-лы, 8 ил.
Изобретение относится к измерению параметров работы, выполненной драглайном при ведении открытых горных работ, и предназначено для оперативной оценки производительности экскаватора-драглайна по перемещению горной массы из забоя в отвал.
Целью изобретения является упрощение способа и увеличение точности измерения производительности экскаватора-драглайна.
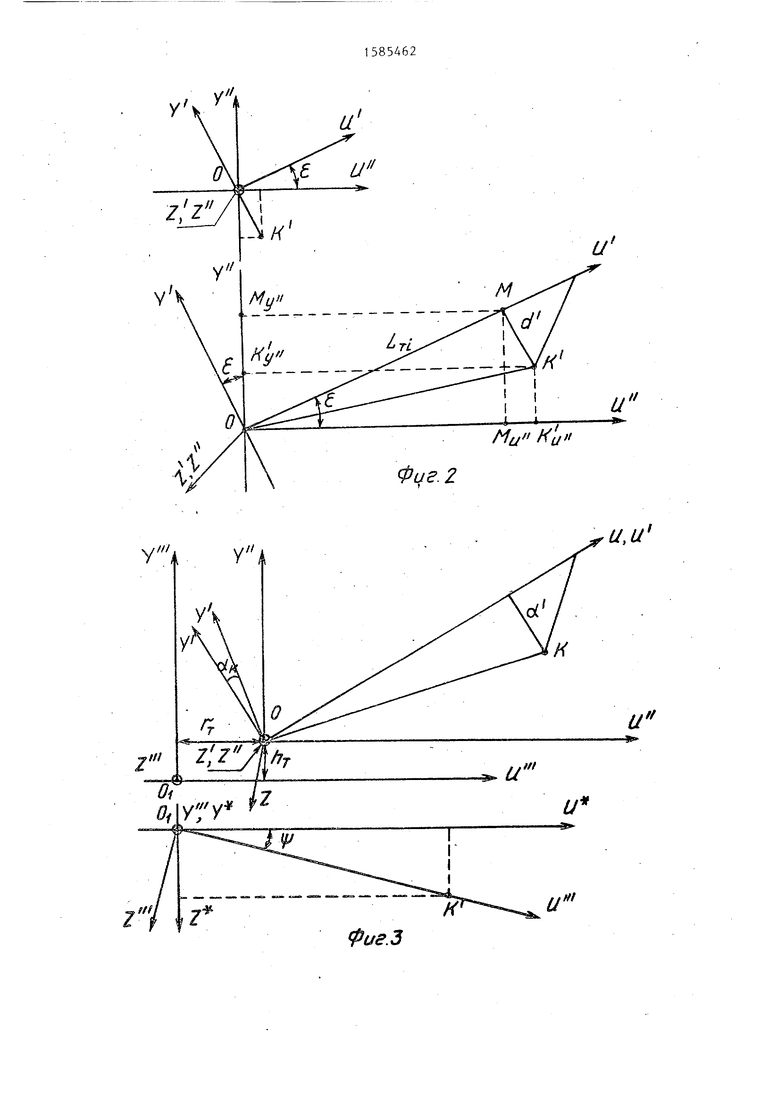
На фиг. 1 приведена схема расположения тягового,подъемного канатов и точки их пересечения в плоскости стрелы, отклоненной от вертикали на угол o/j-; ,на фиг. 2 - схема расположения проекций тягового, подъемного канатов и точки их пересечения в системе координат Y U Z с центром в точке схода тягового каната с направляющего шкива; на фиг. 3 - то же, в системе координат с центром
10
15
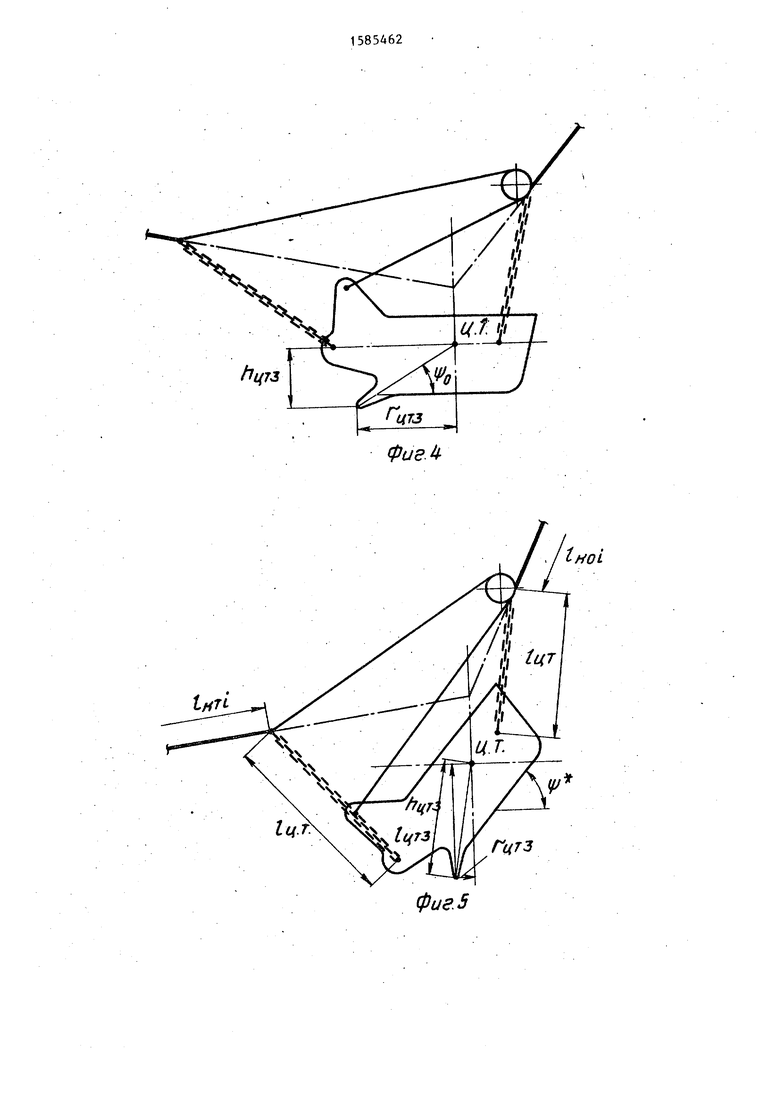
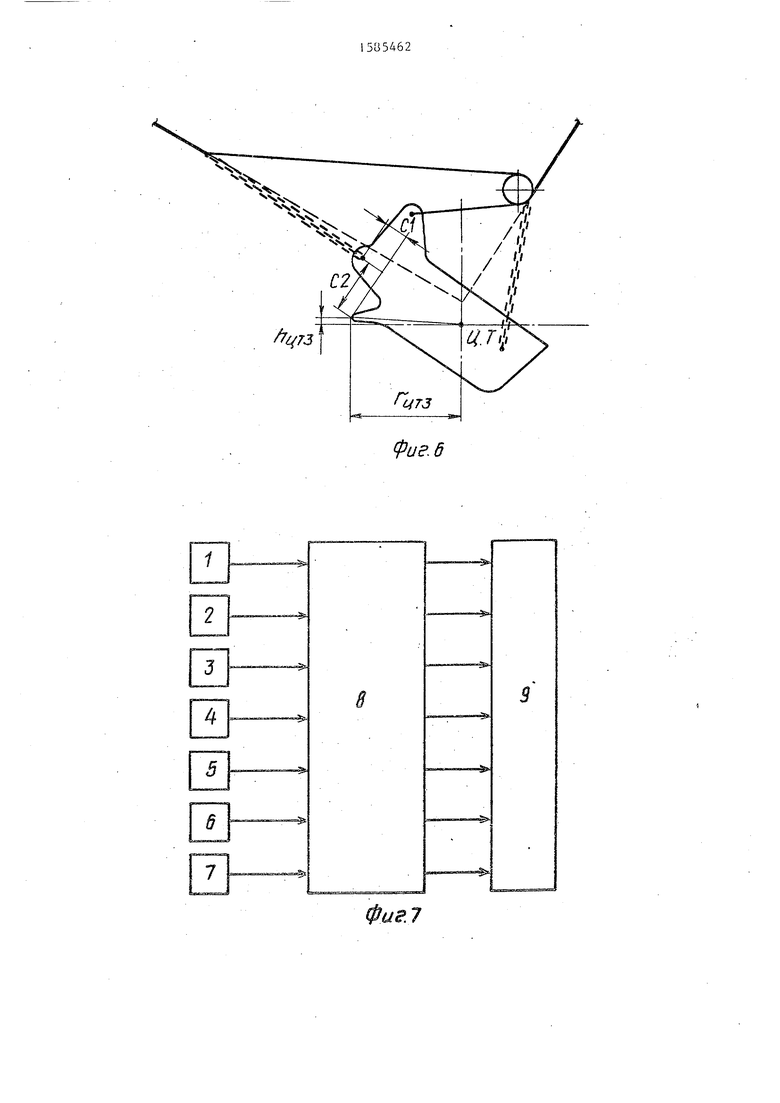
точке пересечения оси вращения кскаватора с нижней плоскостью базы экскаватора; на фиг. 4-6 - положение овша соответственно при его,транспортировке с грузом (т.е. при Sign , Sign , Sign ), после его разгрузки (т.е. при Sign , Sign , Sign ), в процессе заполнения ковша (т.е. при Sign , Sign , Sign ); на фиг. 7 - структурная схема устройства,, реали- зующего способ; на фиг. 8 - структурная схема вычислителя.
Данный способ включает следующие основные операции.
Измерение в процессе экскавации длин свисающих-частей тягового (l,-) и подъемного (1кп,-) канатов.
Измерение токов якорных цепей дви- 2Q гателей механизмов тяги (Ту,-) и подъема dpi) ковша.
Определение начала операции черпания Sign , если в течение Т
Y- 1,0 ,, (1)
Ti
где Т 1,5-2,0 с.
Определение начала операции подъема груженого коёша Sign , если в
25
течение
2,5
In;
7 1,0
(2)
Определение начала операо.ии разгрузки ковша Sign , если в течение Т
2,5 IT
(3)
- Определение длин тягового и подъемного канатов от точек схода с направляющих шкивов до точки их условного пересечения
(4) (5)
, К
емной цепей упряжи ковша;
коэффициенты удлинения тяговой и подъемной цепей (зависят от конструкции ковша); Sign 1.0-. ; (6)
sign . , (7)
Измерение угла поворота оси стрелы экскаватора относительно оси выработки (за положительное направление при- .нимается направление по часовой стрелке) у .
. Измерение угла поворота оси стрелы экскаватора при начале операции подъема груженого ковша:
ViSign .
(8)
Измерение угла поворота оси стрелы экскаватора при начале операции разгрузки ковша:
V |Sign . . (9) нрк I ь
Определение и запоминание величины угла поворота платформы с груженым ковшом
V
нпг .
(10)
Измерение угла наклона плоскости поворотной платформы экскаватора в вертикальной плоскости стрелы .
Измерение угла поворота блока наводки тягового каната о/1 (при-повороте блока наводки в сторону положительного направления оси Z с/, 0; при повороте блока наводки в сторону отрицательного направления оси Z /к 0).
Определение при черпании координат кромки зубьев ковша в трехмерной системе координат, ориентированной вдоль оси выработки:
5
0
Y .
ЗК1
(d,
+ ) cos 0/1 ( 1 1)
(L-r-i- ) cos 4- dicosoi sin + + r cos V ;(12)
Z d. sinc/ncos (4 ,(13)
t
3k где h
r - высота и радиус вращения точки схода тягового каната, с направляющего шкива блока наводки:
L -LUi
2L
, текуш.ее значение
проекции свисающей части тягового каната на ось стрелы|(14)
- длина стрелы;
f
ЦТ
( Фо+ tf) горизонтальная проекция расстояния между кромкой.зубьев и i центром тяжести ковша; (16)
тз цтз вертикальная . проекция расстояния между кромкой зубьев и центром тяжести ковша; (17)
а,т2 Расстояние от кромки
зубьев до центра тяжес- ти ковша; Уд - угол наклона линии от
кромки зубьев до центра тяжести к.овша к днищу; (( const;
у - угол наклона образующей днища ковша к горизонту;
arctg ful - 1,5);
- ri
EC пл
)
sign , если
Sign - сигнал выполнения операции транспортировк груженого ковша:
, если
Г Sign
Т ni 0.71
пн
(23) (24)
m - число измерений течение t , 1,5-2.0 с.
Sign - сигнал выполнения операции транспортировки порожнего ковша:
Sign , если
Sign Sign
(25)
еде Sign - сигнал нарушения паTnKt
тек
Sisn С,. 1
|Sign .(30)
или sign . если
р аметров отвала д где Sign С 4., 1 - сигнал начала при разгрузке ковша рации черпания в ()-M цикле экскавации.
Определение объема вынутой из забоя горной массы в каждом цикле 50 экскавации
V, 2ГУэ; (31)
Vnri V;Mafe fnr; мии
V.
ДАвКС MHW
V.
(26) - максимальный и минимальный углы сектора разгрузки ковша;
где V,. а , если
Ua; .1 Y3i -YV
L/иин Змв1« змии-
55
Змии
(32)
-Z,;
а - длина ребра элементарного
, y tкуба: а 1-5 м;
чяке координаты границ забой- ,Ujj,Yj.,.-координаты центра тяжести
jMew
ного блока.
элементарного куба V .
1585462
- угол наклона оси стрелы к горизонту.
Определение выполнения цикла экс- 5 кавации как реализации последователь- ,ности операций черпания (Sign ), транспортировки груженого ковша . (Sign ), транспортировки порояне- го ковша (Sign ), т.е.
Г Sign )
Sign , СГ.ЛИ Sign ( (20) Sign
о- ,11 Г Sip,n где Sign . если |д. HT3-OJ(21)
з--о)(
sign - сигнал нарушения забойных параметров:
Y , I Sign Y,
ЗмиНЗк; змакс
из мин I Sign и,,,
Z
ау3 ллмн 25
: Z I Sign
J s. 1..
(22)
3) 4)
30
Запоминание в каждом цикле эквации при Sign С-1 координат кро зубьев ковша Y. , U. , .
Определение длительности i-ro ла экскавации
t.,. t.
X/l;
Sign ,(27)
5
0
u,i TeKJsigh
где cfj длительность операции транспортировки порожнего ковша в i-M экскавации;
тпк1
(,- С. если t.p,; С, С 20-60 с.
-tTCKJ
t. , если ,
(28) (29)
TnKt
. t
тек
Sisn С,. 1
|Sign .(30)
где V,. а , если
Ua; .1 Y3i -YV
-Z,;
координаты центра тяжест
элементарного куба V .
Подсчет числа произведенных дик- i лов экскавации п.
Определение средней производительности драглайна за п циклов экскавации i
in,;(33)
где П
ni
J п
П|
U,
(34)
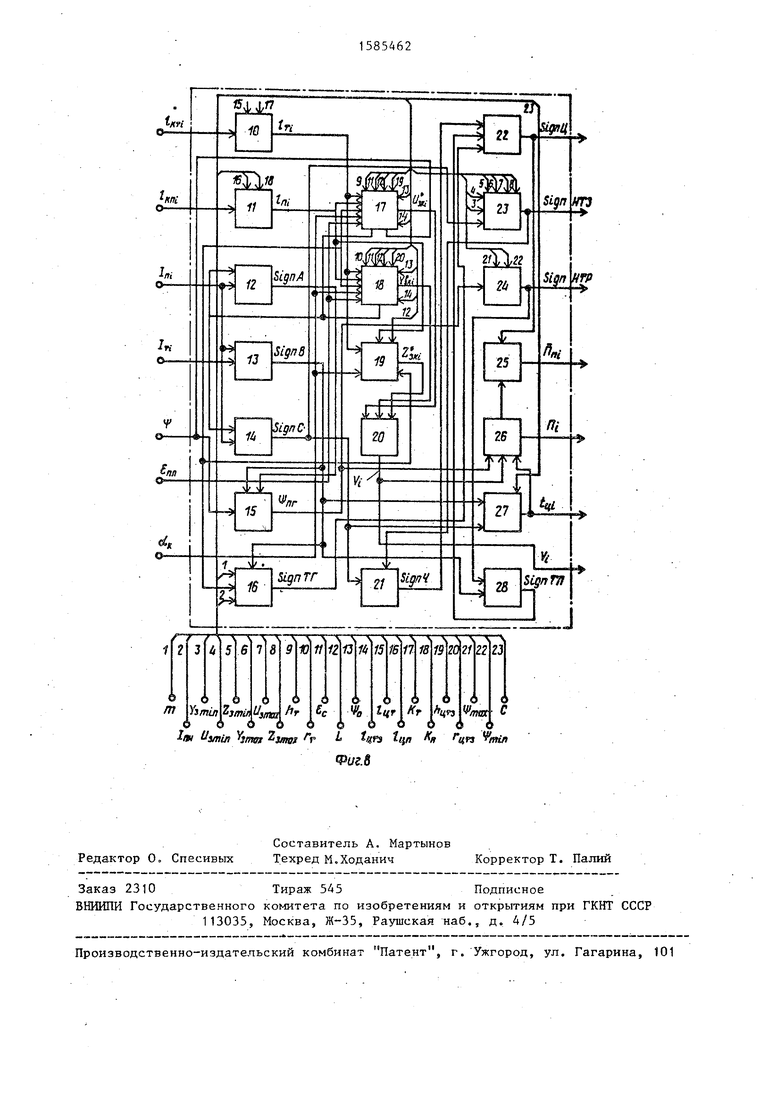
На фиг. 7, 8 Ноказан пример аппаратурной реализации.
Устройство, реализующее способ оперативного измерения производитель- 15 ности экскаватора-драглайна, включает (фиг. 7) датчики длин свисающих частей тягового 1 и подъемного 2 канатов, токов якорных цепей двигателей меха- низмов подъема 3 и тяги 4 ковша, уг- 20 ла 5 поворота платформы, угла 6 наклона плоскости поворотной платформы в вертикальной плоскости стрелы, угла 7 поворота блока наводки тягового каната, вычислитель 8, выходной-блок 9. 25 Выходы датчиков 1-7 подключены к входам, вычислителя 8, выходы которого связаны с выходным блоком 9.
Вычислитель 8 включает (фиг.8) узлы 10, 11 определения длин тягового 30 и подъемного 1 п; канатов, узлы 12-14 формирования сигналов выполне- ния операций начала подъема коаша (Sign ) , начала его р азгрузки (Sign ) и начала черпания (Sign С -jj 1), узел 15 измерения угла поворота платформы с груженым ковшом, узел 16 формирования сигнала выполнения операции транспортировки. груженого ковша (Sign ), узлы 17-19 оп- 40 ределения координат кромки зубьев ковша в трехмерной системе координат, ориентированной вдоль оси выработки, узел 20 определения объема горной массы Vy-, вынутой из за- дЗ боя в i-M цикле экскавации, узел 21 . формирования сигнала выполнения опе- рации черпания (Sign ), узел 22 формирования сигнала выполнения цикла экскавации (Sign ), узел 23 Q формирования сигнала нарушения забойных параметров Sign ), узел 24 формирования сигнала нарушения параметров отвала при разгрузке ковша .(Sign ), узел 25 определения .средн ей производительности драглайна ТТ., запциклов экскавации, узел 26 определения производительности П- в i-M цикле экскавации, узел 27 из
5 0 5
0 j 0 З Q
мерения длительности t,; цикла .экскавации, узел 28 формирования сигнала выполнения операции транспортировки порожнего ковша (Sign ).
Выход узла 10 связан с входами узлов 17-19, выход узла 11 подключен к соответствующим входам узлов 17-19, выход узла 12 под.ключен к входу узла 15, выход узла 13 подключен к входам узлов 15, 16, 27, 28, выход узла 14 связан с входами узлов 21, 23, 27, выход узла 15 подключен к входам узлов 24, 26, выход узла 16 подключен к входу узла 22, выходы узлов 17-19 подключены к входам узла 20, выход которого связан с входом узла 26,выход узла 21 подключен к входу узла 22, выход которого связан с входом узла 25, выход узла 23 подключен к входу узла 21, выход узла 24 подключен к входу узла 28, выход которого связан с входом узла 22, вькод узла 26 под- ключен к входу узла 25, а вход узла 26 связан с выходом, узла 27.
Устройство работает следующим образом.
.В процессе работы экскаватора от датчиков 1-7 в вычислитель 8 поступают сигналы, пропорциональные соответствующим выходным переменным 1
kni ni т; . V , л/- . о/к . В результате этого на выходах узлов Ю, 11 формируются сигналы, пропорциональные длинам тягового 1 у-; (формула 4) и подъемного If,; (формула 5) канатов, которые п оступают в узлы 17-19. Кроме того, на входы узлов 17-19 поступают сигналы , с(| , на входы узлов 17, . 18 - сигнал ЕПЛ. В результате на выходах .узлов 17-19 формируются сигналы
Z .. (формулы 1.1-19), коJ(l
и , Y
3Ki 3Ki .... торые поступают на входы узла /и. На
выходе последнего фо рмиру.ётся сигнал V,- (формулы 31, 32). В процессе экскавации на выходах узлов 12-14 формируются соответственно сигналы Sign А, Sign В, Sign С. В результате на выходе узла 15 формируется сигнал Ц, на выходах узлов 16, 21,28 формируются соответственно, сигналы Sign ТГ (формулы 23, 24), Sign Ч (формула 21), Sign ТП (формула 25) при выполнении операций транспортировки груженого ковша, черпания, транспортировки порожнего ковша. Указанные сигналы поступают в узел 22, на выходе которого вырабатывается сигнал Sign Ц (формула 20), При нарушении параметров забоя в процессе экскавации на выходе узла 23 формируется Sign (формула 22), а при нарушении параметров отвала при разгрузке ковша на выходе узла 24 формируется Sign (формула 26). При выполнении цикла экскавации на выходе узла 27 формируется сигнал (формулы 27-30) пропорциональный длительности цикла экскавации, на выходе узла 26 формируется сигнал П. (формула 34), характеризующий производительность экскаватора в цикле экскавации, а на выходе узла 25 формируется сигнал П.(формула 33), характеризующий производителность экскаватора за п циклов экскавации. Сигналы Sign Ц, Sign НТЗ, Sign НТР, rini, rij, , V; поступают в выходной блок 9 для фиксации и ин- рикации.
Таким образом, в процессе э кскава ции на основе информации, поступающе с датчиков 1-7, вычислитель 8 формирует и выдает в выходной блок 9 следующую информацию: сигнал о выполнении цикла экскавации (Sign ), сигнал -о нарушении параметров забоя (Sign ), сигнал о нарушении параметров отвала (Sign ) величину производительности экск авато- ра за п циклов экскавации (среднее значение) Пп,-, производительность экскаватора за i-й цикл экскавации
П., длительность 1-го цикла экскавации t щ и объем горной массы V, перемещенной в i-M цикле экскавации.
Ф о р-м ула изобретения
h.
S высота и радиус вращения точки схода тягового каната с направля0
5
0
5
0
и запоминание величины угла поворота платформы с груженым ковшом, определение выполнения цикла зкс кавации, измерение длительности цикла экскавации, отличающийся тем, что, с целью повьппения точности, измеряют в процессе экскавации угол наклона плоскости поворотной платформы экскаватора и угол поворота блока наводки тягового каната, определяют в каждом цикле экскавации начало операции черпания, определяют при черпании 1 :оординаты кромки зубьев ковша в трехмерной системе координат, ориентированной вдоль оси выработки, задают минимальные и максимальные значения координат параметров забоя и отвала в той же системе координат, сравнивают с ними фактические значения координат кромки зубьев ковша при выпол 1ении операций черпания и начала операции разгрузки ковша, по результатам сравнения судят о нарушениях заданных параметров забоя и отвала, запоминают координаты кромки зубьев ковша в процессе черпания, определяют в каждом цикле экскавации объем вынутой из забоя горной массы, подсчитывают число произведенных циклов экскавации, а среднюю производительность драглайна за п циклов экс- . кавации определяют по формуле
35
Vnr 4s
где V. - объем вынутой из забоя гор- ной массы в i-M цикле экс-- кавации;
угол поворота платформы экскаватора с груженым ковшом; длительность i-го цикла экскавации
ющего шкива блока на- . водки;
d. - расстояние между центром тяжести ковша и осью стрелы;
г „5 цтз Г оризонтальная и верти- кальная проекции расстояния между кромкой зубьев и центром тяжести ковша тягового каната;10V , - углы поворота платформы экскаватора и блока наводки;
- текущее значение проекции свисающей части тя- гового каната на ось стрелы.
ri
20
je
Sign , если
Sign Sign
операции транспортировки груженого ковша.как
, если
SiRn
Ш
0,7 I
пи
операции транспортировки порожнего ковша как
Sign , если
f Si| ;;ли
I Si:
Sign Sign ; ,
где Sign С,
Sign В - соответственно сигналы начала черпания и начала разгрузки ковша;
SignHTS
SignHTP - соответственно сигналы нарушения забойных параметров и нарушения параметров отвала при разгрузке ковша, а цикл экскавации определяют последовательностью выполнения операций черпания, транспортировки груженого ков- ша и транспортировки порожнего ковша.
06/г/
а
и
Фиг. 2
и
HI
W.J
фиг. Д
tnoi
Гцтз
фиг 5
i{T3
фиг. 6
| Способ измерения количества работы выполненной экскаватором-драглайном | 1982 |
|
SU1097765A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
