Изобретение относится к области гидроавтоматики и может быть использовано в конструкциях самонастраивающихся насосных систем.
Целью изобретения является повышение точности регулирования.
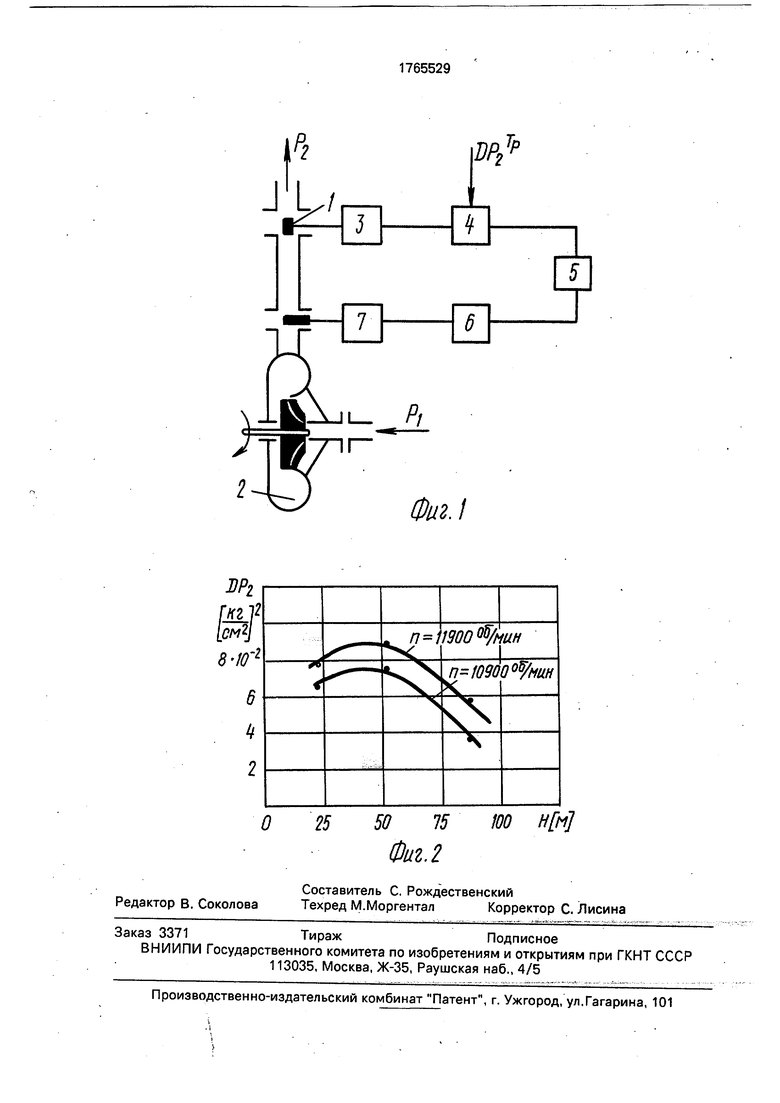
На фиг.1 изображена схема устройства для реализации способа регулирования давления нагнетания центробежного насоса; на фиг.2 - зависимости дисперсии давления от напора при двух скоростях вращения насоса.
Устройство содержит последовательно включенные датчик 1 давления насоса 2, усилитель (не изображен), вычитатель 3 дисперсии давления (включающий квадратор, интегратор и осреднитель, не изображены), сравнивающий блок 4, блок 5 управления, корректирующий элемент 6 и механизм 7 перемещения задвижки 8. Задатчик подключен к блоку 4 (не изображен).
Способ осуществляется следующим образом.
С помощью датчика 1 измеряются мгновенные значения давления нагнетания Р (t), которые преобразуются в электрические параметры тока. Эти сигналы усиливаются усилителем и поступают в вычислитель 3, где вычисляется среднее текущее значение давления mp(t) и его дисперсии ДР(х) С вычислителя 3 сигналы поступают на вход блока 4, а к второму входу блока 4 от задатчика подается требуемое значение дисперсии
ДРтр.
Если допустимое значение дисперсии давления на выходе насоса задается с учетом требуемого среднего значения давления, то регулирование дисперсии осуществляется относительно этого требуемого значения. Зная требуемые средние значения давления на выходё насоса и плотность распределения f P-(P/ т) его случайных
О
ел ел
К)
о
значений, легко определить допустимую дисперсию. Дал ле, производят непрерывное сравнение вычисленного значения с заданным значением ДРзф блока 4. После сравнения с сигналами задатчика разност- ные сигналы с учетом знака поступают на блок 5 управления, формирующий сигнал, соответствующий нулевому, положительному и отрицательному значениям разностных сигналов. Сигнал рассогласования отрабатывается задвижкой 8, которой управляется по выбранному закону с помощью корректирующего элемента 6.
Пусть е (т) - погрешность регулирования дисперсии давления в соответствии с изобретением, т.е. отклонение текущего значения дисперсии давления от его заданного постоянного или переменного значения
Ј(t) DPs(t)-DP(t)(1)
С учетом, что
e(t) DP3(t)(t)-mp(t), (2) где М - знак операции математического ожидания;
mp(t)- среднее текущее значение давле- ния в общем случае, являющегося нестационарным случайным процессом, при
e(t) -О, получим:
DP3(t) (t)-mp(t)2}(3)
Пусть среднее значение давления mp(t) отличается от требуемого mpTp (t) и имеет вариацию v P(t), такую, что
mp(t) mpTp(t) + vP(t)(4)
Тогда из (3) следует, что условие Ј - 0 соблюдается при . D Рз (t) М (t) + v P(t) - mpTp(t)2} (5)
Т.к. сумма P(t) t v P(t) представляет собой отклонение давления уже не от текущего, а от требуемого (например, нале- ред заданного) давления, обозначим его как
P(t) + v P(t) Р1 (t) и получим, что
DP3(t) (t)-mpTp(t)2}(6)
Из этого выражения видно, что, если допустимое значение дисперсии давления на выходе насоса задается с учетом требуемого среднего значения, то регулирование дисперсии осуществляется относительно этого требуемого значения, т.е. по Р (t). Выражение (6), таким образом, указывает на правило выбора значения DP3(t) необходимого для реализации способа. В частном случае стационарного (в статическом смысле) случайного процесса, соответствующего изменению давления P(t ) легко получить, что:
DP3 MflP (t) - mpTp(t)2}
- 00
mprpffp CP JdP,(7)
а для нестационарного, соответственно:
00
DPa(t) (t) - mPrpft)2 fp (P t) dP (8)
- 00 ,
Зная требуемое среднее значение давления на выходе насоса и плотность распределения fp (Pj t) его случайных значений, легко определить допустимую величину дисперсии давления.
Формула изобретения
1.Способ регулирования давления нагнетания центробежного насоса, при котором измеряют величину давления в напорной магистрали, преобразуют ее в контролируемый параметр и, сравнивая последний с его заданным значением, формируют управляющий сигнал, по которому осуществляют регулирование проводимости переменного гидравлического сопротивления в напорной магистрали, отличающийся тем, что, с целью повышения точности регулирования, контролируемый параметр определяют в виде дисперсии давления насоса.
2.Способ по п. 1,отличающийся тем, что определяют и сравнивают с его заданным значением дополнительный контролируемый параметр в виде среднего квадратического значения давления.
тТр

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство регулирования давления нагнетания центробежного насоса | 1990 |
|
SU1765530A1 |
| Устройство для смешения и дозирования газовой смеси | 1990 |
|
SU1835309A1 |
| Устройство для регулирования соотношения расходов центробежных насосов | 1990 |
|
SU1765531A1 |
| Способ регулирования соотношения расходов центробежных насосов | 1990 |
|
SU1763723A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ ПОГРУЖНЫМ ЭЛЕКТРОНАСОСОМ С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ | 2003 |
|
RU2250357C2 |
| Устройство автоматического контроля и защиты насосной станции | 1980 |
|
SU918545A1 |
| Система управления приводом насоса | 1987 |
|
SU1492090A1 |
| Гидравлический источник питания | 1983 |
|
SU1201561A1 |
| СПОСОБ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2650534C2 |
Сущность изобретения: измеряют величину давления в напорной магистрали, преобразуют ее в контролируемый параметр. Сравнивают контролируемый параметр с заданным значением. Формируют управляющий сигнал, по к-рому осуществляют регулирование проводимости переменного гидравлического сопротивления в напорной магистрали, контролируемый параметр определяют в виде дисперсии давления насоса. С заданным значением величины давления определяют и сравнивают дополнительный контролируемый параметр в виде среднего квадратичного значения давления. 1 з.п. ф-лы, 2 ил.
2
Р,
Фиг.1
| Патент США № 3957395, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
